P+F洗车机传感器三、方便又智能的指挥控制站S-100无人机的指挥与控制主要是通过地面控制站(GCS)来完成的,传感器和电子设备获取的全部实时数据也是由控制站来接收和处理的。控制站配备了两台计算机,用于任务规划和控制、有效载荷控制及图像检索等。其中任务规划和控制主要是利用地理信息系统来显示S-100无人机的位置,并探测威胁区、禁飞区和其他信息,所有的信息都可以显示在液晶显示屏上。除此之外,控制站的操作员可以通过控制单元以及安装在S-100无人机上的操纵杆手动控制无人机,还能将其切换到VTOL模式、自动模式、手动模式和返航模式等不同工作模式。

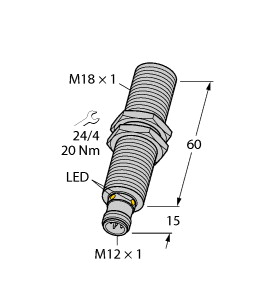
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
德州洗车机传感器防务展上同时展出的还有这个车族中的另一款车——“半人马座”装甲步兵战车/ OWS 30 FRECCIA,它安装的是奥托•梅莱拉公司的“重拳”(HITFIST)顶置式武器站(OWS),配备ATK公司的MK44 30毫米机关炮,除此之外还安装1挺7.62毫米并列机枪和一对能发射“长钉”(APIKE)、“短号”(KORNET)或“猎豹”(INGWE)反坦克导弹的发射器。武器站可由装甲防护下的操作员通过操纵杆和一个多功能彩色显示器来控制。该系统有一个全景瞄准具,包括通常的昼夜、激光传感器、CCD彩色摄像机、红外摄像机以及人眼安全激光测距仪等,操作者在车体内就能对战场有一个全面的、直观的了解。乘员可通过在炮塔底部的舱口补充弹药和进行基本的维护。炮塔的水平转动和武器的高低俯仰均采用全电驱动模式,虽然武器站是电动的,但断电不会使武器站失去战斗力,因为可以手动操作一个备用光纤瞄准具来瞄准目标射击。
含税运洗车机传感器随着5G时代的到来,万物互联即将成为现实。具有大带宽、低时延特点的5G,很可能会带来仓储系统的大优化、大变革。参考2019年6月举行的5G展会,基于5G技术通过万物互联,应用AGV小车、移动机器人,通过摄像头等各种传感器,工人可远在上海通过操纵杆和视频,实时控制远在河南的挖掘机进行作业,仓储作业真正可能实现彻底的无人化。而电商行业对于仓储能力极高的标准要求,很有可能是最早探索和实现仓库彻底无人化的行业。无人化仓储,将会对储位配置提出极高的要求。
P+F洗车机传感器保时捷采用了多种技术,包括主动空气动力学技术,可稳定汽车或最大限度地提高燃油效率。磁性减震器每秒感应并适应行驶条件数百次。前轮拱中的声学传感器检测道路上的湿气,并提示驾驶员选择特殊的“湿”模式以优化牵引力和安全性。这项技术的发展阻碍了手动变速箱的选购。911的新操纵杆换档杆是一个结实的金属残肢,仅让您想起您所缺少的离合器摇摆的喜悦。
德州洗车机传感器Vishay推出的磁性编码位移传感器日前,Vishay Intertechnology, Inc.(NYSE 股市代号:VSH)宣布,推出新的磁性位置传感器—RAME027,其精度可与霍尔效应器件媲美,而且有更高的可靠性和更好的耐久性。一次可编程(OTP)的Vishay Sfernice RAME027在25℃下的精度为±0.33%,高度只有27mm。典型应用包括国防和工业用的操纵杆、电动执行器、机械工具、纺织品制造、铣床和机器人。
含税运洗车机传感器 在Doing交互模式下,由人类教师直接指挥机器人进行示教。提供示教的命令可以手动提供给机器人。这些命令可以通过键盘、操纵杆或任何其他接口生成,这些接口传输给机器人。这类模式还包括由人类教师引导的机器人的物理动作,就像人类通过牵着孩子的手完成任务一样。示教数据可以在示教过程中从机器人的内部编码器或传感器获得。这样做的好处是不需要映射,因为示教是在机器人自己的物理结构中进行的。然而这种交互方式对于高自由度机器人来说是不可行的,因为很难通过手动指令同时控制大量的关节,甚至是抱着机器人完成任务。机器人还通过视觉[8]、可穿戴设备[9]等多种形式感知动作,并对动作进行解读。在[9]中利用研制的数据手套实现对机器人完成遥操作示教,实现多类交互动作的技能学习。
据丰田官方介绍,其e-Palette是模块化的纯电动汽车,没有方向盘或踏板等传统控制方式,车辆配备的操作员可以使用操纵杆进行手动控制。丰田车辆控制平台搭载了专门开发的自动驾驶系统,包括自动驾驶控制软硬件、高精度3D地图、摄像头和LiDAR等传感器,以实现实时探测和避让周边存在的障碍物。
更有趣的是问题:这个飞行设备是如何控制的?无人机的控制有几个概念。 第一种是遥控驾驶:操作员在远处,在屏幕前的指挥所,“双手握着操纵杆”(现在通常一个操纵杆就够了),通过无线电频道将控制命令传送给指挥所。使用来自传感器的信息 来自相机,用于反馈的雷达,速度和角度计 来自无人机本身。
然后在方向盘的右下边有一个刮水器操纵杆,左侧依次为:1x,点动刮水﹣刮水器刮一次; OFF :关闭刮水器; INT :刮水器间歇刮水或雨量光线传感器工作; LOW :慢速刮水; HIGH :快速刮水。前方有雨量/光线传感器,表示设置间歇刮水间隔时间或调整雨量传感器灵敏度,一般拨到四个雨滴显示的最大雨滴,就很灵敏,然后将操作感操纵到 INF 位置,有雨量在前风窗就会自动启动雨刮刷,自动感应雨刮刷就设置完成了,很简单。
加拿大臂2被官方名称是空间站远距离机械手系统简称SSRMS。它可以自我重定位,能用像蠕虫一样的动作,点对点的移动至空间站的许多部分。加拿大臂2必须依靠PDGFs装置,这种装置通过它的闭锁式末端传感器向加拿大臂输送能量,数据和视频。加拿大臂也可以由移动运载车运载至综合桁架结构的全部行程。大部分时间里,机械臂的操作者可以通过机器人工作站(RoboticWorkStation)简称RWS上的3个LCD显示屏看清他们正在进行的工作。MSS上有2个RWS单元,一个RWS单元操纵MSS一次。在建成后完整的国际空间站上,一个RWS单元位于命运号实验舱,另一个位于圆顶屋内。目前,所有的RWS单元都在命运号试验舱内,RWS单元有2套操纵杆:1套旋转式手动操纵杆,1套平移式手动操纵杆。外加显示和控制面板,以及便携式电脑。