P+F洗车机传感器图1显示的为振动辅助焊接的示意图。在焊接过程中,激光束垂直于基材表面。气体输送管和激光束的角度在激光焊接方向呈 45°。激光功率5000W的光纤激光器进行焊接,波长为1.06 μm。激光模式为连续波。振动系统为一个基于磁致伸缩材料的自研制的高频率振动平台,该平台包括一个振动控制系统和一个巨大的磁致伸缩的材料激发器,功率放大器和一个加速传感器。振动的频率可以在300到1500 Hz之间进行调节。一个磨床设备用来将焊接区表面的氧化物进行去除。待焊接的板材牢固的固定在夹具上。振动平台的振动频率通过频率扫描在扫描的过程中确保在2A的电流范围内来搜索。频率扫描的结果绘制成频率和加速之间的曲线。采用三个不同的同步频率进行实验,分别为522, 919和 1331 Hz。纯的氩气作为保护气体。

(P+F 超声波传感器 UC4000-30GM-IU-V1-HA)
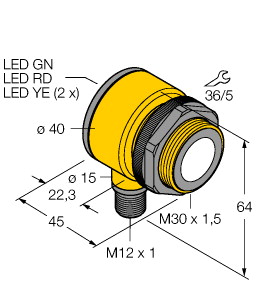
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,可调声功率和灵敏度,温度补偿,已通过 UL 认证,可用于 Class I/Div 2 环境
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : 标准 : EN 60947-5-2 UL 认证 : CSA 认证 : CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 缆线连接器 , M12 x 1 , 5 针 , 4 线 外壳直径 : 35 mm 防护等级 : IP65 材料 : 注意 : 单个组件:UC-4000-30GM-IUR2-V15;V1-G-2M-PVC;ADAPT-ALUM*-M30X1/2 NPT/HB****
东营洗车机传感器目前,ALB数据处理软件多为各公司研制的随机软件,国内尚无相应的软件系统。ALB数据处理研究进展主要表现在如下几个方面:①ALB测深理论[2]。激光测深能力与水体散射系数和衰减系数比值强相关,借助唯像理论可建立激光测量的唯像雷达方程;激光束虽具有一定发射角,但其传输规律仍可用准直光束传输特性来描述,据此可建立准直光束在海水中传输的唯像理论模型;影响水底回波振幅的因素主要有水底反射率和脉冲展宽,基于激光辐射传输模型可对水底回波振幅进行校正。②归位计算。根据GNSS提供的激光扫描仪三维绝对坐标,结合飞机姿态、激光扫描模式及扫描角、往返测量时间,可归算海面点的三维坐标;根据红、绿激光测量时差、海水折射率、波束扫描角,归算绿激光海底圆斑的三维坐标。③波形识别。波形识别是检测激光回波、获取水面和海底波束传播时间,进而计算深度的关键。目前采用的技术主要有:为抑制白天强背景噪声,更精确地提取激光回波信号,对回波信号首先开展高通滤波滤除低频信号,再识别两种高频脉冲;利用回波信号的上升时间及振幅等特征,采用半波峰法识别海表和海底回波信号,进而估算水深;采用窄脉冲、高速探测器、小接收视场、窄带干涉滤光片和正交偏振方式接收,改善浅水海表和海底反射信号叠加;采用双高斯脉冲拟合,从极浅海水回波中分离海表和海底脉冲,实现水深提取。④浑浊度反演。海水浑浊度会引起激光能量衰减,影响激光回波波形;反之,根据激光水体回波特征可估计海水浑浊度。提取ALB原始波形数据后,分析激光水体后向散射波形,估计有效衰减系数,进而反演海水浑浊度。⑤绿激光高度修正及单一绿激光测量。受海表渗透深度影响,绿激光海表测量存在不可靠性。利用红、绿激光测量结果分析绿激光水表渗透深度空间变化,利用统计法对绿激光海表高程进行修正,提高绿激光海表测量的精度。采用逐步回归法建立关于泥沙含量、波束扫描角和传感器高度的绿激光水表渗透深度模型,推导绿激光高度修正模型,据此对绿激光海表和海底高程进行修正,实现基于单一绿激光的高精度海底地形测量。⑥深度偏差修正。几何发散和多次散射使绿激光底回波产生脉冲展宽效应,引起波峰位移,导致测深产生偏差。深度偏差主要与ALB系统测量参数(波束扫描角、传感器高度)和海水水文参数(水深、浑浊度)有关。采用逐步回归法建立关于水深、波束扫描角、传感器高度和海水浑浊度的深度偏差模型,据此对ALB进行深度修正,实现ALB高精度水深测量。
代理洗车机传感器作为替代解决方案,LiDAR传感器可以通过发射一束激光束,然后测量其反射信息来获得场景的细粒度3D结构信息。一个LiDAR传感器在一个扫描周期内发射光束并进行多次测量可以产生一个深度图像,每个深度图的像素有3个通道,分别为球坐标系中的深度r、方位角α和倾角φ。深度图像是激光雷达传感器获取的原始数据格式,可以通过将球坐标转换为笛卡尔坐标进一步转换为点云。一个点云可以表示为N×3,其中N表示一个场景中的点数,每个点有3个xyz坐标通道。附加功能,例如反射强度,可以附加到每个点或深度图像素。深度图像和点云都包含由LiDAR传感器直接获取的准确3D信息。因此,与相机相比,LiDAR传感器更适合检测3D空间中的目标,并且LiDAR传感器也更不易受时间和天气变化的影响。然而,LiDAR传感器比摄像头贵得多,这限制了在驾驶场景中的大规模应用。3D目标检测图解,见下图:
P+F洗车机传感器ADAS传感器用于监测车辆周围的整体环境,其运行是基于电磁波,如雷达或激光束(LiDAR)、超声波或使用成像技术等,这些,对于传感器外壳材料的选择有着重要的影响,比如,雷达传感器外壳的前部(也称为天线罩)必须能够穿透雷达波束。为了尽量减少辐射损失,用于天线罩的材料必须具有较低的介电常数(Dk)和损耗因子(Df),为此,朗盛对其产品系列中的众多配混料进行了广泛的测试,包括单向衰减测试,以及比透射率和反射率随频率和材料厚度变化的测试。“我们有许多PBT所具有的Dk值和Df值都适合于使用越来越多的77~81千兆赫的ADAS雷达频率。”Hoefs说道。
东营洗车机传感器结论我们的传感器与开发的InP/InGaAs光阴极一起提供了几纳秒级别的处理速度。具有几个A/W的灵敏度。与所提出的器件相比,雪崩铟镓砷光电二极管的灵敏度低于1安/瓦。开发的设备可用于许多应用,例如,在能见度差的条件下实时检测反射激光束,高速定位系统。所开发的传感器的高灵敏度和处理速度也可以应用于折射测量、无损检测、光纤。
代理洗车机传感器记者从天津大学获悉,该校李醒飞教授团队将磁流体动力学应用于微角振动传感中,通过高带宽、低噪声的微角振动信号拾取和反馈控制,结合惯性稳定平台技术,在解决长距离激光束稳定捕获、跟踪和瞄准方面取得突破,突破了国外对亚微弧度角振动测量关键技术的封锁,填补了国内空间微角振动在轨测量技术空白。日前,该团队研发的MHD微角振动传感器正式成为中国空间技术研究院核心器件空间飞行验证试验项目。
奔腾激光 | 激光切割机传感器的特点激光切割机是利用高功率密集的激光束使材料形成切缝,从而达到切割的目的,比起传统的切割此种技术精度更高,切割速度更快,更能满足切割要求,因此它被广泛应用,对于此设备来讲,传感器是激光切割机一个重要的部件,下面我们就来具体看一下它的特点:
由于光电传感器对红外辐射,或可见光,或对二者都特别灵敏,因而就更加容易成为激光攻击的目标。此外,电子系统及传感器本身还极易受到激光产生的热噪声和电磁噪声的干扰而无法正常工作。战场上的激光武器攻击光电传感器的方式主要有以下几种:用适当能量的激光束将传感器“致盲”,使其无法探测或继续跟踪已经探测到的目标。或者,如果传感器正在导引武器飞向目标,则致盲将使其失去目标。
激光雷达传感器必须通过发射激光到环境中,然后靠测量每一束光反弹回来的距离多远来确定物体的位置。这被广泛认为是无人车感知周围环境最有前途的一项技术。但这项技术也存在其独特挑战。激光必须分散到不同的方向,将传感器的视场扩展到一束光以外的地方。Velodyne是通过将传感器放置到机动的转盘,以360°扫射激光来做到这一点的,也就是所谓的机械扫描激光雷达。Quanergy等创业新贵都在开发新颖的激光束控制方式,这些手段有望减少活动件的数量,同时使得设备更加小型化、更耐用且造价更低。像Quanergy正在开发的这种没有采用任何活动件的设备就是所谓的固态激光雷达。
2.激光位移传感器的操作原理:探头发出一束激光,在被测物体表面发生漫反射,反射的一束光可以到达探头的接收器件。探头通过计算反射激光束的角度来计算位移。因此,这种激光位移传感器又称三角反射传感器,其精度可达纳米级。激光三角测量法适用于高精度、短距离测量。在目前的工业机器人应用中,通常采用三角测量方法。