P+F洗车机传感器基于MSP430的红外传感器的车辆流量检测器的整体设计,硬件设计相对比较简单,主要是软件程序的编写使操作方便,实用性较强。车辆流量检测器的整个系统主要包括红外传感器、LCD1602液晶显示、微处理器MSP430和其他部分(电源模块和最小系统)。每个模块对整体设计都非常重要。本文采用等距离安置n个同型号的红外传感器集中采集信号,然后将采集信号脉冲输送给微处理器MSP430处理。MSP430接收到的信号有脉冲信号和电平信号。MSP430单片机在处理信号数据时主要将采集的数据进行计数和通过电平信号处理计算出此时通过车辆的车速,然后将处理结果通过并行通信的方式在LCD1602图4无线收发器电路原理图液晶显示。车辆流量检测器的软件整体程序流程图如图5所示。在微处理器处理信号之后首先将结果保存在SD卡中,在必要查询时,可以将SD卡中的数据信息转移到上位机PC中,从而提高处理器MSP430的处理速度[4]。

(P+F 超声波传感器 UC4000-30GM-2EP-IO-V15)
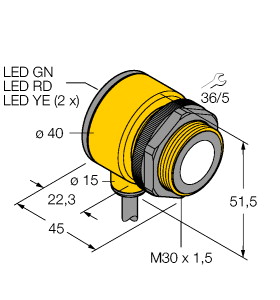
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,2 路可编程的开关输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 2 路推挽式(4 合 1)输出,短路保护,反极性保护 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出功能: 窗口 模式
输出特性: 常开触点 输出 2 : 近开关点: 500 mm
远端开关点: 2000 mm
输出功能: 窗口 模式
输出特性: 常开触点 光束宽度 : 宽
潍坊洗车机传感器其他选项:RTD转换器IC除了通过从分压器或惠斯通电桥读取电压来测量温度外,我们还可以使用温度传感器放大器,就像我们将要看到的那样,用于热电偶。这些集成电路将为您提供数字温度输出,而不是电压电平,通常包括所有放大和补偿电路,您需要这些电路来提供传感器能够提供的最精确的温度测量。此选项的成本可能是一个重要因素,但使用PGA-ADC的成本也是一个重要因素,如上所述。使用PGA-ADC为本文提供了更好的学习体验和演示,因此我们将不再详细介绍RTD转换器IC。
订货洗车机传感器 维修后思考:该车的空调维修思路清晰,故障也比较简单,但是笔者也是借助厂数据流的分析才能如此快速地确定故障维修方向。因此接下来的数据流的分析才是木文的重点所在。简单归纳一下,数据流的优点有以下几个方面: (1)数据流能直观反映相关元件的工作状态,比故障码更高效和简单明了。前不久笔者维修一辆TT车辆,维修发动机排放灯点亮,当时读取系统的故障码有怠速混合气过浓,该故障码的指向范围很大,包括供油过多,供气过少,正常的思路检查包括:汽油泵、喷油器、进气系统、中冷器系统、曲轴箱通风阀系统等,如果全部检查一遍耗时费力,但是笔者就是通过观察相关数据流,拔下该车空气流量传感器后怠速时信号为4.5g/s,车辆熄火后仍然是2.0g/s,由此笔者判断该车的空气流量传感器损坏,更换后故障排除。这个正是依赖于数据流的分析和判断,所以该车从接手到确定故障原因,前后不过半个小时时间。 (2)数据流还包含压缩机的中断代码,如果弄懂这些中断代码,那么寻找故障点就轻而易举。比如笔者多年前支持维修的一个大众空调,当时在其他4S店基本更换了空调所有部件,包括空调泵、空调控制面板、蒸发箱冷凝器等,但是空调始终不会工作,最开始笔者也是没有头绪,后来通过读取空调系统的数据流,发现空调数据流第一组中断代码显示为12、查阅资料12代码含义为发动机控制单元切断空调,遂将诊断方向转到发动机。经读取发动机的故障码为质量或容积空气流量电路低电平输入且静态(如图4所示);读取空气流量传感器数据为0,检查发现空气流量传感器的插头线路断裂,恢复好之后清除故障码,空调系统也恢复正常。
P+F洗车机传感器另一种是彻底脱离模拟式称重传感器的制造工艺和传统的电路补偿与调整技术,开发新型的数字式智能称重传感器。它是在弹性元件贴片、固化、后固化和布线组桥后,就脱离模拟式称重传感器的制造工艺。通过由放大,滤波,A/D转换,微处理器芯片,温度敏感元件等元器件组成的数字式电路,以及标度变换,数字滤波,数字调零,数字补偿等软件技术,使称重传感器输出的数字信号成为一组组有格式、有规律的高低电平信号,经过效率高、可靠性好的接口实现远距离传输。即:
潍坊洗车机传感器防跌落传感器,我们是借用避障传感器,不过是朝下安装。防跌落传感器必须安装在小车底盘外。平常,接收到来自桌面的反射,输出为高电平。当小车车轮接近桌边时,防跌落传感器已经移出桌面,接收不到红外线,输出为低电平。电机也是转向避让。
订货洗车机传感器电机与电器基于改进广义磁路法的表贴式永磁电机空载气隙磁场解析计算一种双端混合励磁的无刷直流发电机运行特性分析基于霍尔传感器的永磁同步电机高精度转子位置观测一种基于线电压差积分的无位置传感器无刷直流电机换相误差检测和校正方法基于反电动势函数的无刷直流电机无位置传感器控制方法共直流母线开绕组电机的移相解耦控制策略严重不平衡负载下盘式对转永磁同步电机的双转子直接转矩控制研究热场影响下新能源用接触器弹跳特性研究高压直流继电器电弧运动仿真分析与实验研究机械弹性储能箱结构及并网控制策略优化电力电子一种混合调制型三路输出DC-DC变换器多模式切换运行的拓扑变换型多谐振软开关直流变换器及参数设计方法基于电压扰动源的并网逆变器输出阻抗测量方法基于自激逆变器的无线电能传输系统级联型逆变器载波周期脉冲调整的功率均衡方法及特性分析一种基于Burst-PWM混合控制的LLC谐振变换器宽电压范围输出策略基于控制自由度组合的简化多电平空间矢量脉宽调制控制策略反激变换器共模噪声的抑制高电压与绝缘高寒地区风电机组雷电防护研究综述大尺寸油纸绝缘结构多电压应力下空间电场特性换油周期对变压器油纸绝缘老化性能影响规律生物电工纳秒脉冲高频透膜效应优先杀伤化疗抗性肿瘤细胞的仿真与实验研究纳秒脉冲电场联合多壁碳纳米管对皮肤癌细胞活性的剂量效应研究
当雨量传感器的雨量值有增量(1mm)变化时,光电耦合器产生一低电平脉冲,通过与非门U1、反相器U2到与非门U3,U3输出一高电平脉冲复位信号到80C31单片机,使单片机复位,退出掉电值守状态开始工作,同时启动工作时间计数器计,在正常情况下,遥测站完成水情数据的采集、处理及数据传输任务后,重新进入掉电值守状态。如果由于干扰使遥测站的程序出现运行错误,在规定的工作时间极限内不能进入掉电值守状态时,工作时间计数器将发出一个时间极限的低电平脉冲,通过与非门U4、反相器U5到与非门U3,U3输出一高电平脉冲复位信号到80C31单片机,使单片机复位,重新开始正常工作。水位增量变化及定时报的工作原理与雨量增量变化和时间极限的工作原理相似。
其中的前置放大器具有自动增益控制功能,可以保证在超声传感器接收较远反射信号输出微弱电压时,放大器有较高的增益,在近距离输入信号强时放大器不会过载;其带通滤波器中心频率可由芯片5脚的外接电阻调节,不需要外接电感,可避免外磁场对电路的干扰,可靠性较高。CX20106A接收超声波有很高的灵敏度和抗干扰能力,可以满足接收电路的要求。同时,使用集成电路也可以减少电路之间的相互干扰,减小电噪声。当接收到40kHz信号后,芯片7脚会出现较短的低电平,接入单片机便可以使单片机产生中断。
在要检测的路段,等距离安装n个红外传感器;首先调制脉冲发生器进行调制脉冲的输出,然后红外传感器的发射管发射红外线,红外接收管接收红外线,当红外传感器的辐射区域有车辆经过时,车体会遮挡红外传感器发射出来的红外线,红外接收管接收不到信号。根据车辆遮挡红外线的时间,传感器会输出一个低脉冲信号给处理器。当红外传感器的辐射区域没有车辆经过时,没有车辆遮挡红外线,这时红外接收管始终接收一个高电平信号,处理器接收到高电平信号时,不做处理,直到有车辆到来,出现低脉冲信号,微处理器MSP430单片机接收到信号,对信号进行处理。若反射信号较短(大约在0.1 ms~3 ms之间),这时反射信号的障碍物可能不是车辆,为行人或其他物体。当反射信号大约在3 ms以上时为车辆。根据障碍物遮挡信号的时间可以判断车的速度。同时MSP430将检测处理的结果通过LCD1602显示出来。在LCD1602液晶会显示通过车辆的车速和在这条道路上通过的车辆的统计数。并且同时把这些数据保存在SD卡内,也可通过无线传输模块传送到上位机,以便查询和防止数据的丢失。车辆流量检测器的整体结构如图1所示。
实验环境是根据道路交通实际情况在实验室进行模拟的。通过编程软件完成程序编写后,将程序下载到试验箱。实验模拟过程:当有障碍物遮挡红外传感器时,传感器都会检测到低电平,然后将检测的低电平发送到单片机的MSP430。信号经单片机处理之后通过LCD1602显示。同时还通过无线传感器模块将检测的结果传送到上位机。在检测过程中由于红外传感器的灵敏度相对较高,只要有物体经过时传感器就会检测到。所以在检测时是否为车辆经过成为检测的关键。因此本文采用延迟双重检测比较法来处理。当红外传感器检测到过往的障碍物时,单片机会控制红外传感器发射管发出红外光的时间。在第一次检测到时,将时间延迟1 μs之后再发出红外光信号,这时检测到的红外光信号与上次检测的信号作比较。若两次检测的结果误差在0.5%以内,则说明检测到的为过往车辆,同时计算车辆的车速和累加车辆数。