P+F洗车机传感器 同时由于工厂采用的是流水线的作业方式,弧焊前的每个定位精度均可能对弧焊的位置精度产生影响,这给焊接带来了巨大的挑战。如果车身在工装上的位置存在大的波动,则焊缝位置将会发生偏移,甚至出现烧穿、焊枪与零件的碰撞等问题。独创的VIDM(可视化、信息化、数字化、智能制造)系统,控制多机器人及变位机协调运动,既能保持焊枪和工件的相对姿态以满足焊接工艺的要求,又能避免焊枪和工件的碰撞,还要控制各机器人焊接区域的变形影响。机器视觉AI技术利用激光传感器和视觉传感器,激光传感器在焊接过程中的焊缝跟踪,提升焊接机器人对复杂工件进行焊接的柔性和适应性,视觉传感器离线观察获得焊缝跟踪的残余偏差,基于偏差统计获得补偿数据并进行机器人运动轨迹的修正,在各种工况下都能获得最佳的焊接质量。

(P+F 超声波传感器 UC4000-30GM-2EP-IO-V15)
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,2 路可编程的开关输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 2 路推挽式(4 合 1)输出,短路保护,反极性保护 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
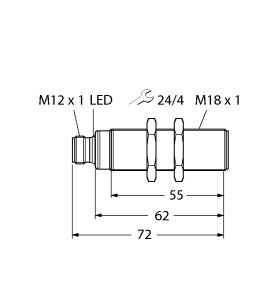
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出功能: 窗口 模式
输出特性: 常开触点 输出 2 : 近开关点: 500 mm
远端开关点: 2000 mm
输出功能: 窗口 模式
输出特性: 常开触点 光束宽度 : 宽
威海洗车机传感器为汽车在GPS信号弱的环境下正常导航应用而诞生的六轴IMU:SMI230,在单个紧凑的封装中精巧地集成了一颗三轴MEMS加速度计及一颗三轴MEMS陀螺仪。两颗传感器采用16比特数据传输。在强大的组合基础上,陀螺仪和加速度计既可以单独运行,也可以为数据同步协同运行。陀螺仪的噪声仅为0.02°/s/√Hz (rms),加速度的噪声仅为0.12 mg/√Hz (rms)。同时,加速度计拥有可靠的温度稳定性,一般为0.2 mg/K的低TCO(偏移温度系数)以及仅为0.002 %/K的TSO(灵敏度温度系数)。一般情况下陀螺仪的累计偏差低于2°/h。SMI230还支持三种节能模式:加速度计:挂起模式;陀螺仪:挂起模式和深度挂起模式。
中国洗车机传感器项目测量原理指标颗粒物激光背向散射法测量范围小0-200mg/m3,0-10g/m3更多详情准确度≤50mg/m3时,误差≤±15mg/m3.零点漂移≤±2.0%F.S.量程漂移≤±2.0%F.S.气态污染物NDIR红外线原理/紫外差分光谱吸收法测量范围0-5000mg/m3(可根据需求定制)(SO2、NOX)零点漂移≤±2.0%F.S.更多详情量程漂移≤±2.0%F.S.响应时间≤100S.线性误差≤±5.0%.重复性误差≤±2.0%.烟气含氧量电化学/氧化锆法测量范围0-25%更多详情线性误差≤±5.0%.零点漂移≤±1.0%F.S.量程漂移≤±1.0%F.S.相对准确度≤±5.0%.响应时间≤100S.重复性误差±2%流速S型皮托管法测量范围0-40m/s更多详情精密度≤5.0%.相对误差>10m/s时,相对误差≤±10%;<10m/s时,相对误差≤±12%。温度热电阻法测量范围0-500℃更多详情示值偏差≤±3℃压力压差传感器测量范围-3000~+3000Pa更多详情准确度±2.5%F.S
P+F洗车机传感器由于车辆开到时已是热车状态,并未出现此方向警告灯点亮的故障现象。但对方向系统进行检查诊断时,系统输出故障代码为C1513,表示“扭矩传感器偏差过大”。于是对方向机的扭矩传感器,进行了零点即对正的检验校正,检查动力转向ECU总成TRQV的电压为4.99伏,标准状态为4.5-5.5伏,电压符合要求;检查动力转向ECU的TRQ1和RTQ2的输出电压,TRQ1电压为2.56伏,TRQ2电压为2.61伏,均在规定电压范围内。人为消除这个故障码后,经试车此故障都没有再现。
威海洗车机传感器 又回到原点,重新思考了一遍,看问题到底出现在哪里。重新读取了一下数据流。发动机转速720r/min (标准值在650800r/min),喷油脉宽6.0ms(标准范围2.0~7.0ms),节气门开度2.0%(标准范围0%~4.0%),空气流量传感器为2.2g/s(标准范围2~5g/s),氧传感器±10%(标准短期范围1 10%,长期15%),电压0.6~0.8V。点火提前角3°(标准范围0~60 BTDC),水温95℃(标准80~100℃)。分析以上数据流,没有发现异常,并且此车在低挡行驶时,正常超过每分钟4000转,并没有出现客户反映的问题,但只要挂入S挡急加速,急加速加不上的症状很明显。因为点火线圈这一块都是刚换的新的,所以这一方面可以排除。在试车的时候无意发现在读取数据流做对比的同时,挂入S挡和低挡的空气流量传感器数据有偏差。(同时也找了另外一辆车,读了一下数据流,做了一下对比,确实有偏差。)这时才发现是由于进气量不足导致的,拆下空气滤芯(如图2所示),更换新的空气滤芯,再试车问题解决。
中国洗车机传感器□ 针对现场工件组对和下料偏差导致工件一致性不佳的问题,该系统结合焊接工艺要求、激光传感器识别的工件信息、可达性要求,精确规划焊接轨迹并引导机器人准确到达焊缝位置,可以识别搭接、对接、角接等多种焊缝类型,能够有效抗弧光、抗飞溅、抗高温。
本次召回范围内的车辆,因位于发动机舱的低压燃油输送管上的压力/温度传感器的塑料外壳成型工艺存在偏差,导致该传感器外壳存在空隙。由于燃油管路在输油过程中存在脉动及该管路处于发动机舱较高温度环境下工作,空隙可能造成传感器塑料外壳开裂,会引起发动机舱发生燃油泄漏,导致车辆丧失动力,极端情况下可能由于燃油泄漏引起车辆起火,存在安全隐患。
在最优实验条件下,基于该纳米复合材料比色传感器的分析性能如图2所示。随着H7N9浓度的增加,TMB溶液的颜色逐渐变蓝,其对应的紫外吸收峰强度也逐渐增强。这是由于H7N9不断引发CHA反应,使HP1和HP2不断从MoS2-Au@Pt 纳米复合材料表面脱离,促使该纳米复合材料的催化活性不断恢复。当H7N9浓度为10 pM-50 nM时,该比色传感器的紫外吸附峰的强度与H7N9浓度的对数成线性关系,检测限估算为2.8 pM(picomolar)。该传感器不仅具有宽的检测区间,还具有优异的检测选择性,可显著区分H1N1、ZIKA、DENA等其他病毒核酸基因序列。此外,该传感器还具有良好的重复性,6次不同检测结果的相对标准偏差(RSD)仅为1.74%。基于上述优异的检测性能,该比色传感器可用于实际体系中H7N9的分析测定,检测结果令人满意。以上结果表明,具有过氧化物酶活性的 MoS2-Au@Pt纳米复合材料是一种很有前途的纳米材料,可与核酸适体等结合构建通用比色传感平台,用于化学或生物目标分子的高效检测。
传感器部分应该是大家最为关注的部分了,根据官方宣传片来看,罗技G PRO X Superlight鼠标应该采用的还是HERO 16K光学传感器,通过G Hub软件插值到25k。如果真的是这样的话,那其实是有些开倒车了,虽然DPI提升了约1.5倍,但是根据目前的测试结果来看,HERO 25K存在精度下降、DPI偏差的问题,直线追踪能力也有一定的下降。虽然官方宣称可以达到亚微米级跟踪性能,但是实际测试表现还是有点不尽人意的。(测试部分参考:罗技HERO引擎升级到25K,G502精准度更好了么?)
本次召回范围内的车辆,因位于发动机舱的低压燃油输送管上的压力/温度传感器的塑料外壳成型工艺存在偏差,导致该传感器外壳存在空隙。由于燃油管路在输油过程中存在脉动及该管路处于发动机舱较高温度环境下工作,空隙可能造成传感器塑料外壳开裂,会引起发动机舱发生燃油泄漏,导致车辆丧失动力,极端情况下可能由于燃油泄漏引起车辆起火,存在安全隐患。