P+F洗车机传感器矩阵式LED大灯属于智能型灯组,背后的监测系统和控制系统才是最关键的技术,它在硬件上通过前车摄像头、大灯控制模块和车身控制模块(包括悬架行程传感器、摄像头、车灯智能控制模块、车速传感器、方向盘转角传感器、光照度传感器)进行行车数据的采集分析、运算处理,在系统软件上通过图像识别处理软件来分辨车前行驶车辆、行人或动物,实现对变化的行车环境进行快速精准响应。(这一段是我编的,光照度传感器,方向盘转角传感器这几个是COPY的)

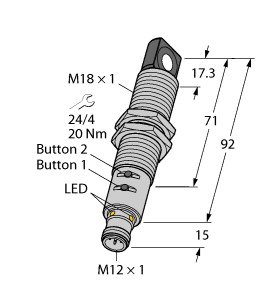
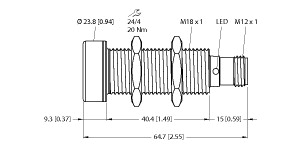
(P+F 超声波传感器 UC4000-30GM-IU-V1-HA)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,可调声功率和灵敏度,温度补偿,已通过 UL 认证,可用于 Class I/Div 2 环境
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : 标准 : EN 60947-5-2 UL 认证 : CSA 认证 : CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 缆线连接器 , M12 x 1 , 5 针 , 4 线 外壳直径 : 35 mm 防护等级 : IP65 材料 : 注意 : 单个组件:UC-4000-30GM-IUR2-V15;V1-G-2M-PVC;ADAPT-ALUM*-M30X1/2 NPT/HB****
潍坊洗车机传感器这种相机的拍摄原理是使用摩尔纹原理进行成像。无镜头相机的感光元件前方会有一块同心圆团的薄膜,就好比相机传感器有低通滤镜一样。当光线穿过时会形成阴影,并由传感器接受,在影像处理时,酒吧详尽的同心圆叠加在因应上,就会产生依旧光线入射角形成的摩尔纹,在经过“Fourier transform”(一种信号转换运算)就能得到最终的影像。
含税运洗车机传感器这块农田里具备的硬核科技还有很多。稻田被分成整齐的田间地块,每个地块进水阀门处配置了水位传感器,每当田里水位发生变化,感应器就会实时传递信息,再由智能系统自动运算发出指令,实现灌溉水自动化管理。水渠旁立着的长管子是流量检测仪,该仪器用于自动测量渠内水流量,通过记录分析达到节水灌溉、精准灌溉的效果……
P+F洗车机传感器CEM TD-9881M空气质量测试仪虽然售价近万元,但是算不上特别专业,检测得出的数据不一定精确。该设备的工作原理是激光散射粒子加速测量法,即空气中的粒子通过设备内置的抽气泵使空气中的粒子进入设备,设备内的传感器探测粒经、反光强度、单位时间内流过的粒子数量,通过内置的运算程序最后计算出PM2.5、PM10浓度。
潍坊洗车机传感器预测性维护能够实现,也要得益于更加高效的通信网络、更加精巧的传感器、能够处理大规模数据的强大运算平台。预测性维护一般通过传感器收集和分析设备的实时数据,用以预测何时可能发生故障。因此,在智能工厂内设置多种监控及传感设备十分必要。
含税运洗车机传感器此外,渗透到汽车、安全和医疗等更高附加值的市场,显示CIS产品开始全面改写产业的应用领域。采用CIS技术能实现以低成本创造更高度的自动化,同时使用新的可用运算架构,如深度学习(deep learning)。CMOS影像传感器产业目前正处于新技术为客户提供真正价值的良性循环中。
蠕变持久测量系统:测控系统采用先进的PID自适应算法,测量系统(包括力传感器和变形传感器)能通过数字测量控制器动态校准,保证测量和控制的精度。在试验过程中所测量的试验力、变形、位移经测量控制器数据的采集、标度变换及处理,在计算机屏幕上数字实时直读和曲线显示,根据试验方法要求,通过计算机控制系统运算后得到控制信号,再经调速系统放大后驱动电机,具有试验力、变形、位移闭环控制功能,真正实现匀试验力速率,匀变形速率,匀速控制,并在试验过程中无冲击切换。
虽然数字芯片的市场规模远大于模拟芯片,但模拟芯片在电子系统中是不可或 缺的。自然界的真实信号通过传感器提取后变为模拟信号,模拟信号需要经由 模拟芯片处理后才能被数字芯片使用。由于传感器、接收器实际提供的信号很 微弱,噪声大且易受干扰,所以一般需要进行信号的预处理,包括放大、滤波、 隔离等。预处理完成后再进行加工,包括运算、比较、转换等,加工完的信号 一般不足以驱动负载,所以还需要进行功率放大。如果信号需要进行数字化处 理,则将预处理后的模拟信号通过 A/D 转换器转为数字信号,处理完后再通过 D/A 转换器转为模拟信号。可见,模拟芯片是电子系统中不可或缺的一部分。
物联网参展观展必选物联传媒IOTE 2019!创自2009年,七万平方米,全球第一展,引领风向标!IOTE 2019国际物联网博览会是物联网产业链又一次全面完整的展示,涵盖物联网感知层(MEMS、RFID、智能卡、传感器、条码、生物识别、视频识别),网络传输层(NB-IoT、LoRa、2G/3G/4G/5G、eSIM、ZigBee、Bluetooth、GPRS、WIFI、UWB、Z-wave),运算与平台层(云计算、边缘计算、云平台、大数据与数据安全、人工智能),以及应用层(实时精准定位、智慧零售、无人售货、工业4.0、智慧物流、智慧城市、智能家居)。
影响头戴式 VR 显示设备沉浸感的其中一个非常重要的因素是 MTP。对于头戴式 VR 头显系 统来说,在 VR 画面经过用户输入、传感器识别、信号传递、计算机 CPU&GPU 运算、显卡 绘制、屏幕响应,之后最终输出到 VR 头显供用户可以看到,实现以上多个环节所需的时间 叫做 Motion To Photons Latency,指从用户运动开始到相应画面显示到屏幕上所花的时间, 这个时间越短,设备的沉浸感越好,时间越长,用户的眩晕感越强烈。MTP(动显延迟)是 VR 领域中非常重要的一个概念。 MTP 低于 20 毫秒能大幅降低晕动症的发生可能。人类的感官系统在一定范围内能感知到视 觉与听觉中相对较小的延迟,VR 晕动症主要看 MTP,MTP 数值越大越容易引起眩晕。人类生物研究表明,人类头动与视野回传的延迟须低于 20 毫秒,否则将产生视觉拖影感从而导 致强烈眩晕,极大程度上破坏 VR 沉浸感。其表象为用户已经做完了一个指令输入,但是没 有同步取得输入结果,有一定延迟存在。而正常的人类感知行为,是当进行一个动作时,视 觉反馈与动作输入的结果几乎是完全同步的。VR 中的延迟会在极大程度上破坏沉浸感,带 来前庭系统的不适,从而引起眩晕。因此,VR 对 MTP 要求通常以不高于 20 毫秒为目标。