P+F洗车机传感器真值地图数据:DRIVE Map 真值地图引擎专为实现更高的准确性而设计,配备 NVIDIA DRIVE Hyperion 数据采集车辆,使用摄像头、雷达、激光雷达和差分 GNSS/IMU 等丰富多样的传感器创建 DRIVE Map。在高速公路和城市环境等选定环境中,它能够实现 5 厘米的精确度,从而达成更高级别的自主性 (L3/L4)。众包地图数据:DRIVE Map 专为实现近乎实时的操作和全球可扩展性而设计。它基于真值数据和众包数据,代表了数百万车辆的集体记忆。DRIVE Map 利用 DRIVE Hyperion 传感器套件中由 DRIVE Perception 软件处理的数据流,包含所有必需的功能和语义信息(包括动态和行为信息),可实现安全舒适的驾驶体验。全球覆盖:DRIVE Map 旨在为全球各地辅助型自动驾驶车辆提供支持。NVIDIA 正在创建北美、欧洲和亚洲主要高速公路(总里程超过 50 万公里)的高精度地图,此大型高精度地图将不断扩展和更新至数百万辆乘用车。多功能数字孪生 DRIVE Map 对于自动驾驶的开发和驾驶功能(例如感知、定位、预测、路线规划和控制等)至关重要。地图数据所示的细节和密度有助于各种应用程序模拟和重现特定位置的数字孪生。Omniverse 上的 NVIDIA DRIVE Sim 能够进一步增强这些地图生成的数字孪生,适用于自动驾驶模拟、远程操作和车队管理模拟等不同类型的应用。

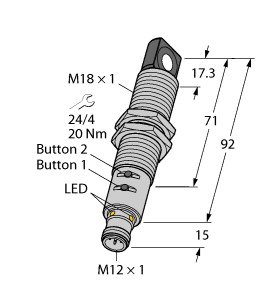
(P+F 超声波传感器 UC4000-30GM-IUR2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 可用前的时间延迟 : ≤ 500 ms 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 210 g 输出 : 评估极限 A1: 500 mm
评估极限 A2: 4000 mm
上升斜坡
青岛洗车机传感器目前AGV导航定位使用中较为普遍的技术是激光定位技术。激光传感器被固定在AGV顶部,扫描与其在一个固定平面上的反光板与移动机器人的距离,并依据反馈的距离数据构建成导航地图。在导航过程中,AGV规划的前往地图中上位机下发的已知的目标地点执行任务,同时AGV实时反馈位置信息和任务执行情况,如图1。
价格洗车机传感器 催化焚烧式传感器,催化焚烧式气体传感器是利用催化焚烧的热效应原理,由检测元件和补偿元件配对构成丈量电桥,在必定温度条件下,可燃气体在检测元件载体表面及催化剂的作用下产生无焰焚烧,载体温度就升高,通过它内部的铂丝电阻也相应升高,从而使平衡电桥失去平衡,输出一个与可燃气体浓度成正比的电信号。通过丈量铂丝的电阻改变的大小,就知道可燃性气体的浓度。首要用于可燃性气体的检测,具有输出信号线性好,指数可靠,价格便宜,防爆规划 不会与其他非可燃性气体产生交叉感染。也很多用于工业现场的可燃气检测,可是美中不足是,不是一切的可燃气都能够用催化焚烧,有的大分子的有机物,对这种传感器就不反响,比方苯。另一方面,这种传感器的丈量精度为LEL等级,远远大于PPM等级,所以只能用在高浓度气体检测,
P+F洗车机传感器同时,此次大会将披露“中国(郑州)智能传感谷”国家及地方传感器科技和产业发展的政策以及规划,建立上下游互融共生、分工合作、利益共享的一体化组织新模式,推进产业链协作,打造传感器生态圈,助推产业落地郑州。
青岛洗车机传感器而SLAM只是一个算法,它需要其他传感器来提供位置、姿态等数据。这些传感器通常为陀螺仪、激光和摄像头,而它们则对应了市面上最常见的三种扫地机器人:陀螺仪规划、LDS激光规划和视觉规划扫地机器人。那他们有什么区别呢?
价格洗车机传感器姜谭工业园区管委会副主任王宏强介绍,西部传感器产业园项目总投资10.2亿元,由传感器产业园(产业化制造基地)、传感器孵化园(产学研孵化基地)、公共服务平台和智能创新中心等组成,将重点引进与发展50户左右在力敏、光敏、磁敏、气敏、惯性等方面具有领先技术、核心科技的新型传感器企业和微电子企业。王宏强介绍说,他们拿出三分之一的工业用地,规划了一个西部传感器产业基地两千亩,计划到十四五末建成国内一流西部最大的传感器专业特色园区,预计产值能达到百亿元以上,现在目前入驻在传感器产业园加上孵化园的一共有十几户企业。
再来说说LDS激光规划。我们都知道激光碰到障碍物就会返回,只要计算激光从发出到放回的时间,就能算出离障碍物的距离。LDS激光测距传感器可以旋转发射激光并接收其反馈,通过发射激光来扫描自身到边界每个点的距离,从而生成数字地图。有了数字地图,想要实现路径规划就相当简单了,而且还能支持APP虚拟墙。当然,LDS激光规划虽然精度高,但是需要用到更贵的传感器,而且开发难度也大,所以,价格也就更贵了。
一要加强成本及效益管理水平,降低制造成本,实现投入产出比大幅提升;二要持续加大自动化项目导入力度;三要超前规划,从生产现场布置、设备布局、工艺流程等方面进行改善,全面提升公司制造形象,为“成为传感器行业领导品牌”提供有力支撑。
机器人在笛卡尔空间及关节空间下的连续路径规划,并通过蚁群遗传算法、RRT算法等实现机器人工作空间避障;通过状态空间动量观测器实现机器人在复杂工作场景中的碰撞保护;基于机器视觉与运动规划算法实现复杂场景中实时运动规划与多机械臂协同作业;通过动力学参数辨识获得机器人准确动力学参数构建机器人动力学模型,可实现高速高精度的轨迹跟踪控制;基于六维力传感器与力矩传感器,可通过阻抗/导纳模型实现机器人柔顺控制应用;基于牛顿迭代法实现冗余机械臂运动学控制和冗余零空间导纳控制。
除了“新秀”,华南地区依旧有非常多专注传感产品数十年的“老兵”。30余年专注于力值测量技术研究,深圳市力准传感技术有限公司(下以“力准”简称)显得更具工匠精神。作为国家级高新技术企业,力准致力于传感器、变送器、控制仪表的研发生产,为用户提供定制化的系统工程控制解决方案,经过多年发展,公司已经拥有现代化的厂房,先进的生产和检测设备,专业的研发团队以及完善的管理体系。丰富的经验,专业的团队,让力准在多年来的发展中更加稳健,对于自身发展有着清晰的认识和精准的规划。