P+F洗车机传感器我们需要做的最后一件事是将电子设备放入外壳中,首先将 arduino 和所有电线粘在 6 厘米一侧,然后将延长线(引脚模拟 0 和 5 伏)连接到矩形的另一侧(9 厘米)边)。现在将三个 LED 粘到我们在 6x5cm 矩形上制作的孔上并进行测试,如果一切顺利,您应该拥有一个小型便携式 Arduino 测谎仪,但让我警告您,这并不是最准确的系统,事实上大多数真实测谎仪都在使用许多其他传感器来确定某人是否在撒谎,例如心率监测器和其他传感器,我所说的是不要将其结果用于严肃的问题。

(P+F 超声波传感器 UC4000-30GM-IUEP-IO-V15)
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,开关输出和模拟量输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
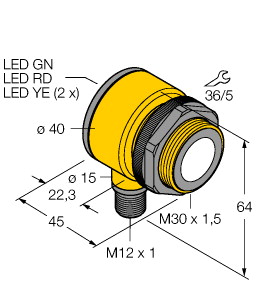
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS
15 ... 30 V 输出电压 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 1 路推挽(4 合 1)输出,短路保护,反极性保护
电流输出 4 mA ...20 mA 或
电压输出 0 V ...10 V 可配置 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 分辨率 : 电流输出:评估范围 [mm]/3200,但 ≥ 0.35 mm
电压输出:评估范围 [mm]/4000,但 ≥ 0.35 mm
特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 负载阻抗 : 电流输出: ≤ 300 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出模式: 窗口 模式
输出特性: 常开触点 输出 2 : 近极限: 500 mm
远极限: 2000 mm
输出模式: 上升斜坡
输出特性: 电流输出 4 mA ...20 mA 光束宽度 : 宽
枣庄洗车机传感器如果一个容器内的液位变得足够低,26 GHz雷达无法将剩余产品反射的信号和罐底反射的信号分辨出来,用户就会想当然地认为容器已经空了,而事实上还没有。这和动作电影中电脑高手无法增强监控画面的道理是一样的。分辨率受限体现了过程效率的自然缺陷。更聚焦的80 GHz雷达设备可以测量罐内液位到最后的1毫米,为用户优化其工艺过程提供精确的数据。它不能阻止一场恐怖袭击,也不能避免一场策划精密的抢劫,不过80 GHz的雷达传感器可以通过其增强的分辨率帮助用户避免浪费。
清仓洗车机传感器本报告的摘要和结论部分为急于了解传感器行业的用户提供了详尽的信息和数据。IDTechEx优势的多语种博士分析师团队,基于20多年的研究积累,提供了基于事实分析的新信息图表。排名前16位的传感器专利申请人有哪些?在13个最主要的细分传感器中,哪些产品占据了主导地位?IDTechEx通过研究给出了哪三种影响未来的重要传感器类型?IDTechEx提供了关于全球传感器市场的14个重要结论。
P+F洗车机传感器事实上,现在所谈论的全屋智能在核心理念上与当年的“未来屋”并无不同,都是物联网系统。不同的地方在于物联网技术,比尔盖茨当时使用传感器,物联网感知互动方式较为贫乏。现在的物联网设备可以通过语音交互、生物识别、感知设备、无线通信以及边缘智能硬件载体,交互方式多种多样。
枣庄洗车机传感器从市场角度来看,更低价的产品往往更容易打开市场,尤其是在如今的直播带货领域也更容易成为爆款,但客观事实是,较低的市场定价,意味着在材料上的偷工减料,以家用美容仪产品来说,有业内人士便指出,美容仪上能够实现精准温控的传感器价格都要在1000多元, 目前已知市面上装有温度传感器的最低售价也近2000元。
清仓洗车机传感器事实上,GCD-121-2000位置传感器非常准确,尤其是在其他基于磁体的系统表现出次优性能的较高温度下。 首先,它们仅依赖于自生磁场的扰动,不受永磁体非线性特性的影响。 这有助于在室温下的整个测量范围内将误差保持在 /-0.1% 以下。 即使在温度变化和目标与传感器之间存在气隙的情况下,误差幅度也可以保持在 /- 0.3% 以下。
检测玻璃墙图 1 说明了玻璃墙和隔墙在现代建筑中的应用, 而服务型机器人(例如真空吸尘或拖地机器人)需要感知这些表面以防止碰撞。 事实证明,使用摄像机和红外传感器很难检测这些元素。但毫米波传感器可检测到玻璃墙的存在及其后面的物体。
事实上,福克斯APS系统无法识别车位白色标线并非个例,在20款车型中,也只有长安CS75 Plus和本田雅阁两款车型能够识别,而其主要原因还是出在传感器上,目前市面上销售的带有自动泊车功能的车辆,很多是采用超声波雷达,没有摄像头,比如说福克斯就只搭载了12个超声波雷达,而长安CS75 Plus在此基础上还搭载了4个360环视摄像头,因此也拿下全场最高分9.5分。
康斯坦特不知道的是,他想象中的“环境”技术实际上是在他的愿景正在形成的同一时期出现的——来自美国国防部冷战推动的研究。这项工作在越南战争期间达到了顶峰,当时为了阻止供应链沿着胡志明小道从北向南流动,美国陆军放弃了大约 20,000 个电池供电的无线声学传感器,推进了威廉威斯特摩兰将军的“所有类型的近 24 小时实时或近实时监控。” 事实上,美国国防高级研究计划局(DARPA)后来称之为“以网络为中心的战争”是麻省理工学院和卡内基梅隆大学以及其他美国精英大学数十亿美元资助的结果,众所周知,最初由 DARPA 开发的技术已成功地重新用于民用。ARPANET 最终成为互联网,而 Siri、动态随机存取存储器 (DRAM) 和微型硬盘驱动器等技术现在已成为日常生活的特征。鲜为人知的是,DARPA 资助的技术也最终应用于智慧城市:GPS、智能照明系统和能源网的网状网络,以及化学、生物和放射传感器,包括可以检测威胁的基因改造植物。智慧城市与军事研究之间的这种联系如今非常活跃。例如,复杂的自适应系统组成和设计环境)明确地将“有人和无人驾驶飞机”与智能城市的“关键基础设施系统”——“水、电力、交通、通信和网络。” 它指出,两者都应用了复杂动态系统的数学技术。DARPA 的一条推文更具挑衅性:“智慧城市和空战有什么共同点?需要复杂的自适应网络。”
在概念车上被命名为“猫眼”的大灯设计(事实上第四代马自达2的前大灯与中网位置都被设计的尽可能低,非常像一只匍匐前进、试图接近猎物的猫科动物的双眼),采用了远近光双LED光源,同时配备远光控制系统,该系统通过位于进气格栅上的摄像头以及光传感器对对向车辆的大灯以及前车尾灯光照强度进行判定,进而自动调节大灯亮度,避免影响其他车辆的视野。