P+F洗车机传感器今天马克笔设计留学的程老师继续给大家带来Arduino的相关知识,之前发布了很多相关文章,记得复习啊!舵机是很多同学喜欢使用的一种传感器。它是一种位置「角度」伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具、航模、机器人中已经得到普遍使用。舵机,其实就是个低端的伺服电机系统,它也是最常见的伺服电机系统,因此英文叫做Servo,就是Servomotor的简称。它将PWM信号与滑动变阻器的电压相比对,通过硬件电路实现固定控制增益的位置控制。也就是说,它包含了电机、传感器和控制器,是一个完整的伺服电机(系统)。价格低廉、结构紧凑,但精度很低,位置镇定能力较差,能够满足很多低端需求。

(P+F 超声波传感器 UC4000-30GM-IUEP-IO-V15)
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,开关输出和模拟量输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
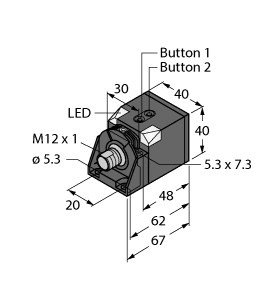
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS
15 ... 30 V 输出电压 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 1 路推挽(4 合 1)输出,短路保护,反极性保护
电流输出 4 mA ...20 mA 或
电压输出 0 V ...10 V 可配置 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 分辨率 : 电流输出:评估范围 [mm]/3200,但 ≥ 0.35 mm
电压输出:评估范围 [mm]/4000,但 ≥ 0.35 mm
特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 负载阻抗 : 电流输出: ≤ 300 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出模式: 窗口 模式
输出特性: 常开触点 输出 2 : 近极限: 500 mm
远极限: 2000 mm
输出模式: 上升斜坡
输出特性: 电流输出 4 mA ...20 mA 光束宽度 : 宽
济宁洗车机传感器打造苹果数字化全链条。沂源华盛科沃云数字果园位于淄博市沂源县鲁村镇刘家坡村,占地238亩,总投资3100万元,基于云计算、大数据、物联网、人工智能的全产业链信息化产品和解决方案,构建起包括数据采集、种植指导、病虫害防治、农业资讯、农场管家、智能管控、价格走势、营销推广、质量溯源、人力资源管理等十大系统,推行各阶段生产环境“传感器监测+芯片网络”管理技术,对果树进行定期信息获取、可视化远程诊断、远程控制、灾变预警等智能管理,形成集智慧化标准种植、智能化后处理、全程冷链物流于一体的苹果全产业链数字信息服务体系。
样本洗车机传感器步进电机,主要是依靠定子线圈序列通电,顺次在不同的角度形成磁场,推拉定子旋转。可省掉用于测量电机转角的传感器,而且位置和速度控制相对简单。一般只用于载荷较小而且十分确定、位置精度要求并不非常高、对体积敏感或在较低价格想要做到较高可靠性的场合。最常见的应用器具有光驱、扫描仪、复印机等。
P+F洗车机传感器而该公司新研发的薄膜虽然同样会过滤可见光,但红外线可以直接进行穿透因此并不会阻止传感器识别用户指纹。3M 表示其研发的近红外传输系统可提供光学识别功能,包括但不限于用来识别用户的指纹、面部以及红膜识别。这项技术完全依靠光学和光学传感器完成不需要利用超声波或其他技术,而在价格方面却远远低于其他识别技术。
济宁洗车机传感器目前,我国主要采用传统的方法检测柑桔黄龙 病病原,未见基于物联网的柑桔黄龙病监测防控技 术的相关报道。国外开展这方面研究已有一定的时间并获得了一些成就,但目前用于检测黄龙病的图 像系统还需改进。物联网监测柑桔黄龙病在种植面 积较小的地区误判率较高,然而精密度比较高的信 号采集传感器价格昂贵,不利于推广使用。因此, 未来的改进柑桔黄龙病监测目标将会是:在黄龙病 识别上有更加精准的识别,同时,对植物能达到无 损检测,减少和简化建立判决模型数量,简化检测 系统的硬件构成,达到降低成本的目的。将在种植 面积较大的柑桔场进行示范研究,推进现代装备在 柑桔黄龙病检测方面的统防统治进展,利用柑桔黄 龙病在物联网的最新监测和预防技术,把柑桔黄龙 病害带来的损失降到最小。
样本洗车机传感器新中国成立初期,在仿制苏式产品过程中,存在大量工艺上和材料上的问题。如环形电位计的绕制、压铸工艺及压铸模的设计和制造、精密浇铸、铍镁合金的热处理、磁性材料的处理以及产品装配调试等。为解决这方面的具体问题,沈祖显利用在美学习的经验协助太原航空仪表厂组建宝石轴承加工车间,促成宝石轴承专业化工厂的建立,使宝石轴承立足于国内生产。还和其他同志一道促成冶金部的工厂试制铍青铜,以满足制造航空仪表弹性元件的需要。他还建议在太原航空仪表厂建立拉丝包漆小组,以解决线绕电位器的金属线材问题。此外,在建立航空仪表工艺科研机构——厂属航空工艺研究所的工作上,沈祖显也倾注了不少心血,多次给有关人员介绍情况,亲自指导选择第一批科研课题,在后来的工作中也经常给予帮助。在指导小模数齿轮加工、波纹管的焊接质量、铜膜盒的研制以及仪表电器行业的压铸工艺和模具延寿等工作中解决了许多具体的技术问题,受到工厂的欢迎。1951年6月,沈祖显从空军工程部转到航空工业局工作,他与昝凌、王裕齐等人共同研制的电子闪光测速仪原理样件也随同转过来,经过改进和结构设计,制成了航-1和航-2式两种样机,经中国科学院鉴定合格后,共生产了50台供应各航空工厂,解决了当时测试陀螺转速表传感器转速的一大关键问题。铂铱合金奇缺问题是当时我国科学发展的瓶颈,沈祖显查阅大量资料,进行对比分析,建议采用金基合金代替铂铱合金。这是因为金基合金不但在性能上同样能满足技术要求,而且其抗有机物污染能力较铂铱合金更好,尤其是金的资源在我国比较充足,价格远比铂便宜,宁用金2000千克,不用铂10千克。但是,采用金基合金需要在工艺技术上解决一系列问题。为了促使这些问题的解决,沈祖显积极奔走于科研、生产、使用等部门之间。他先商请电器科学研究院研制了金镍铜合金,后来又在宝鸡航空仪表厂创建了电位器研究室,从而使以金基代铂基的电位器的科研工作有了组织保证。1967年他先后在昆明和北京召开了金基合金的技术交流会和航空材料有关标准的审定会,当时正值“文化大革命”初期,社会秩序混乱,沈祖显不顾自己的安危得失,一心扑在工作上,同大家一起很好地完成了会议任务。在他的倡导下,到1975年,金基合金不仅成功地广泛应用于航空工业的有关产品上,而且还被推广到全国其他一些部门,并于1978年被纳入国家标准。金基合金的采用,仅在太原航空仪表厂,平均每年就为国家节约外汇80万元。同年,沈祖显在全国科学大会上荣获“在我国科学技术工作中做出重大贡献”的奖状。过去我国航空工业中使用的航空电器元件是苏联40年代的老产品,质量差,废品率和返修率较高。针对这一情况,沈祖显经过大量调查研究,提出了“元件入手,关键当先,方向要准,质量第一”的发展航空仪表电器的意见。在此基础上,他又具体抓了航空接插件、电位器、液体电门的改进和电刷、极化继电器、陀螺轴承等项目的攻关,并协助航空工业部主管部门召开了压力弹性敏感元件规划发展会议。他还组织有关厂家参加的8人工作组,用了4个月时间,调查了使用、科研、生产方面65个单位,写出了《航空接插件使用状况和改进意见》的调查报告及其8个附件。在此基础上,根据他的建议,由有关工厂联合组成了接插件设计研究组,沈祖显作为顾问负责技术指导工作。为了祖国航空事业的发展,沈祖显默默无闻,倾注心智,在技术上精益求精,从不满足于现状,努力攻关;让人更加敬重的是,他这一辈子不计个人得失、名誉地位、不求回报、乐于奉献,甘愿做一名默默耕耘的“孺子牛”。
还有个步进电机,也是大家经常提到的。那我来简单说一下步进电机和舵机的区别,步进电机英文是stepper/step/stepping motor。主要是依靠定子线圈序列通电,顺次在不同的角度形成磁场,推拉定子旋转。步进电机的好处是,你可以省掉用于测量电机转角的传感器。因此在结构上和价格上有一定的优势。而且它的位置和速度控制相对简单。其缺点是,第一,与同等功率的电机相比载荷比较小,没有角度传感器的情况下不能输出大力矩。第二,功耗相对较大,要么全开,要么全关。所以要么接近满功耗,要么就不能出力。ULN2003驱动板上IN1、IN2、IN3、IN4分别连接UNO开发板的数字引脚2,3,4,5;驱动板电源输入+、-引脚分别连接UNO开发板的5V、GND。
设计了基于无线传感器网络的大数据采集与传 输体系结构 , 研制了蔬菜水果价格数据的爬虫程序 页面获取算法、病态数据过滤算法和蔬果信息数据 仓库,以及基于蔬果大数据查询的回归分析算法和 优选算法的 Java 实现,并通过系统整合建立了预测型。设计了基于图形界面的试验原型系统用于数 据采集、展示、存储、分析与建模。为设计生产大 数据感知、分析、监测与建模一体化软件提供重要 参考。此外,开展了基于多源大数据的重大害虫预 警模型研究,利用大数据找出了影响重大害虫发生 的页面湿度、空气温度、空气湿度等 5 个关键影响 因子及其具体的量化关联参数,为柑桔黄龙病相关 大数据的采集、分析与管理提供保障。
本次展会,工采网将携带核心产品赴展,争取给广大客户带来实用、价格优惠、质量上乘的各类智能传感器产品。在展览现场,您将获取我们的一手产品资讯,与企业面对面交流,直观感受新产品和技术。更可以与我们技术工程师专家共同探讨、交流、分享传感器及其应用技术的新进展和面临的机遇与挑战。
随着智能驾驶技术兴起,阻碍智能驾驶技术开发利用的瓶颈随之显现,其中之一就是单车成本过高。“自动驾驶是出行产业追逐的终极领域,传统厂家、科技巨头、行业新秀推出的自动驾驶项目层出不同,然而,成本也伴随传感器的增多而不断增加,天价车不应是自动驾驶的必然代价。” 李谦说。一部较为完善的智能驾驶系统价格不菲,但如果把投在车上的钱都集中到路上,系统成本就会大幅降低,“更经济”应是智能交通的理性选择。