P+F洗车机传感器在具体研究中,课题组先是针对盲环境下因无信标(卫星信号差、WiFi 等因故无法使用)造成的定位数据不完整问题,提出了一种自主三维空间定位信息融合方法,利用移动载体运动零瞬态特征抑制惯性器件长时漂移的定位方法,通过对惯性测量组合和智能信息融合的盲环境下移动载体非规则运动的认知,判断移动载体运动状况。分析移动载体线运动和角运动零瞬态特征,确定多部位传感信息零瞬态判别准则。建立多约束条件下融合移动载体非规则运动特征的惯性自主定位方程,对移动载体装有的多个传感器数据、确定的修正状态、根据判定准则获得的零瞬态修正关系进行信息融合,解决了移动载体在盲环境下无法获取完整定位信息的问题,克服了传统借助预置节点方法的成本高、架设难度大和传统惯性测量单元长时漂移大的缺点,得到了更高的定位精度。

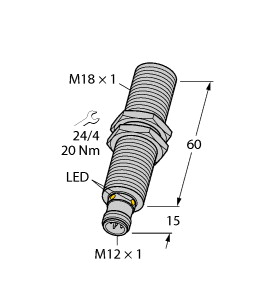
(P+F 超声波传感器 UC4000-30GM-IUR2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 可用前的时间延迟 : ≤ 500 ms 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 210 g 输出 : 评估极限 A1: 500 mm
评估极限 A2: 4000 mm
上升斜坡
泰安洗车机传感器从技术指标看,红魔5S这次采用6400万像素索尼IMX 686 CMOS主摄,1/1.7英寸大底传感器,78.3°广角,0.8μm大像素感光颗粒,0.1s极速对焦,6p镜头,PDAF相位对焦,单色温闪光灯。通过与不同环境进行适配,无论是白天还是夜晚都能保证获得优质画质;800万像素的超广角AF镜头拥有超大视野,极大的增加了拍摄的空间感;200万像素微距摄像头,可以在非常短的焦距内进行对焦。
中国洗车机传感器三摄的第一大优势是暗光场景下的强大拍照能力,这个时候使用的是彩色+黑白两颗摄像头,彩色摄像头用于成像,黑白摄像头用于捕捉细节。彩色主摄像头的传感器尺寸较大,可以获取更多的进光量,再加上黑白摄像头带来的细节捕捉,可以在暗光下获得更好的成像。
P+F洗车机传感器2021 年报道了一种动态范围为 124 dB 并使用子帧外推架构(subframe extrapolating architecture)的 SPAD 光子计数图像传感器 。一个背照式( BI) 单光子雪崩二极管(SPAD )像素阵列堆叠在底部芯片上,读出电路通过像素平行的 Cu-Cu 连接,如图 13(a) 所示。图13(b)是像素单元的简图。每个像素都有一个 9-b 数字纹波计数器 (CN),用于计算入射光子的数量。来自计数器的溢出进位 (OF) 返回到淬灭电路以控制 SPAD 激活并锁存时序代码 (TC)。然后将 14-b时序代码 (TC) 分配给所有像素,并在 OF 标志发生变化时覆盖计数器,如图 14 的时序图所示。读出光子的 9-b 计数或锁存的 14-b TC,并且在弱光条件下准确获得所有光子计数,而不会出现计数器溢出。但是,当计数器在高光条件下溢出时,溢出像素会记录时间,并外推整个曝光期间的实际入射光子数。
泰安洗车机传感器随着像素和并行 ADC 数量的增加,图像传感器会输出大量数据。2017 年,提出了一种三层堆叠的 CMOS 图像传感器以记录 960 fps 的慢动作视频,如图 4 所示;三层之间通过硅通孔(TSV)连接,从并行 ADC 获得的数据缓存在第二层 DRAM 中,以实现慢动作捕捉。对于超慢动作录制,当来自 ADC 的数字数据通过 102-Gbit/s 总线临时缓冲在 DRAM 中时,该传感器可以在全高清分辨率下以 960 fps 的速度运行。当传感器在 30 fps 的电影拍摄过程中检测到用户的触发或场景中的快速运动时,读出速度将变为 960 fps。在 DRAM 中一次最多可以存储 63 帧全高清分辨率,并在随后的电影捕捉过程中输出缓冲数据。
中国洗车机传感器到目前为止,他们已经在动物模型上测试了他们的无线植入系统。然而,还有很多工作要做。Yeo 还得到了美国国家科学基金会的支持来推进这项技术。他最近从 NSF 获得了一项为期 3 年、价值 400,000 美元的资助,专注于他的印刷纳米膜传感器和生物电子学,用于无线和连续监测血管健康。
如果液面静止且与传感器表面垂直,探测液体就很容易。如果液面波动大,可延长传感器的响应时间,从而获取波动变化的平均值以获得更一致的读数。但是,超声波液位计还不能精确探测表面为泡沫状的液体,因为泡沫会使声音的传播方向发生偏离。可以使用超声波液位计的反向超声模式,探测形状不规则的物体。在反向超声模式下, 超声传感器会探测一个平整背景,如墙壁。任何穿过传感器和墙壁之间的物体都会阻断声波。传感器即可通过探测干扰来识别物体的存在。
AdaSky与意法半导体公司(STMicroelectronics)合作研发了一款图像信号处理器(image signal processor,ISP)芯片,可省去快门(shutter)部件,使得该款传感器可实现7天/24小时(24/7)的全天候持续工作。AdaSky的传感器——Viper采用了基于卷积神经网络(convolutional neural networks)的深度学习算法,该项高端技术已获得技术专利,可提升目标物探查、分类及情境分析的精度,从而为驾驶员提供预警,告知存在的问题或挑战。AdaSky热能传感器的远红外线的光束可达8-14微米,在炎热气候下仍能高效地使用。
一加6首次采用 C-PHY℠ 技术(点击有详细解释),在你按下快门的瞬间,可获得最高 2 倍的数据来多帧合成图片,速度更快,不易模糊。2000 万+1600 万高清双摄,和全新的 SONY® IMX 519 传感器,感光面积比上一代增加 19%,照片画质更加出色。指哪儿对哪儿的双核对焦,进光量比 f/2.0 增加 34% 的 f/1.7 大光圈,白天更清晰,夜晚更纯净。
2020 年报道了 1280 × 720 4.86-µm 像素间距 BI 堆叠 EVS。图 18 显示了对比度检测 (CD) 功能的像素框图以及像素内异步读出接口和状态逻辑块的示意图。光电流被转换为电压信号 Vlog,然后通过使用电平交叉比较器检测的异步增量调制 (ADM) 获得对比度变化。图 19(a) 中的 BI-stacked EVS 实现了 1-µs 行级时间戳、每秒 10.66 亿个事件 (eps) 的最大事件率,以及 35 nW/像素和 137 pJ/事件的数据格式化流水线 用于高速低功耗机器视觉应用。图 19(b) 显示了一些示例应用的传感器操作。大约 1 勒克斯的交通场景记录展示了低光对比敏感度。低延迟像素和高速读出操作带来的高时间精度允许传感器在 3D 深度传感应用中解码时间编码的结构光图案。图 20 显示了 EVS 中像素间距的趋势。由于堆叠设备技术,对于百万像素的实际使用案例EVS 的像素尺寸现在低于 5 µm 间距。