P+F洗车机传感器这两款新器件均提供用于29 x 29 mm2摄像机设计所需的小尺寸封装和低功耗,使它们成为用于嵌入式视觉部署的理想选择。它们的主要区别在于分辨率和帧速率:1”光学规格的XGS 12000提供1200万像素 (MP)分辨率,帧速率高达90 fps;而1/1.1”光学规格的XGS 8000提供全4k/超高清(UHD)分辨率(4096 x 2160像素),帧速率高达130 fps。而且,由于两者不仅可用于单色和彩色配置,还可用于不同速度等级,因此其最合适的配置可以与给定的应用相匹配——无论是用于通用机器视觉(如检测和工业自动化),还是用于广播或监控。X-Class平台以及其全新的XGS 8000和XGS 12000图像传感器改变如何充分利用摄像机设计来支持多种产品,为摄像机制造商带来全新维度的设计灵活性。随着未来XGS分辨率以及其他像素选项添加到X-Class平台,摄像机制造商将能够快速充分利用单一摄像机设计,以更高的性价比支持更多的产品分辨率和功能。 也就是:更快、更好、更便宜。

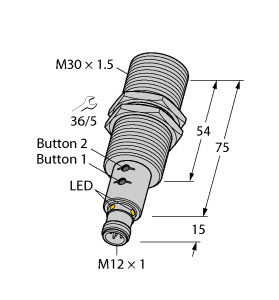
(P+F 超声波传感器 UC4000-30GM-E7R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,NPN,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
日照洗车机传感器 此传感器设置于仿照人类多层皮肤的结构内,其最大特点是具解耦的能力,即将外力自动区分为两类不同力量,并准确量度该两种力度,以分析或控制物体的静止或运动状态。此外,传感器的触感“超分辨率”可精确判断外来刺激的位置。
含税运洗车机传感器传统的激光雷达只能提供间接的速度数据,能快速地发射单个激光脉冲,帧速率达毫秒级,只是偶尔会忽略周边的物体。相比之下,Aeva的紧凑型立方体传感器能不断发射低功率激光,此类激光基于光干扰技术,非常独特。技术上的根本差异使该传感器的射程范围可达300米、功耗低于100瓦,分辨率可达到厘米级,而且即使在恶劣天气条件下,以及感知行人、以及金属杆等反光物体时,该传感器的性能都比传统的传感器更好。
P+F洗车机传感器在 2022 年 2 月 23 日发表在Nature Machine Intelligence上的一篇论文中,马克斯普朗克智能系统研究所 (MPI-IS) 的一组科学家介绍了一种名为“Insight”的强大软触觉传感器,它使用计算机视觉和深度神经网络准确估计物体与传感器接触的位置以及施加的力有多大。该研究项目是朝着机器人能够像人类和动物一样准确地感知周围环境迈出的重要一步。与其天然对应物一样,指尖传感器非常灵敏、坚固且分辨率高。
日照洗车机传感器研究人员将低成本触觉传感器与机器学习相结合 开发具有抓握感觉的机器人让机器人抓取物体时对物体产生感觉对提高效率非常重要。苏黎世联邦理工学院的研究人员宣布,他们已利用机器学习技术开发了一种低成本的触觉传感器。该传感器能高分辨率、高精度地测量力的分布。这些特征使机器人手臂能够更灵活地抓住敏感、脆弱的物体。
含税运洗车机传感器但如果这种设计灵活性能够扩展到产品尺寸方面,而不仅仅是分辨率呢?这正是安森美半导体全新CMOS图像传感器X-Class平台背后的理念,让单一摄像机设计支持不同的像素特性。如今,单一摄像机设计不仅能够扩展图像传感器中的像素数量,还能够扩展所使用的像素类型——无论是全局快门、卷帘快门、增加的动态范围,还是其他不同的功能。只要将像素置于X-Class平台所用的通用高速低功耗帧中,就能够充分利用单一摄像机设计提供所需的支持,进而加快新摄像机设计的面市时间,并简化供应链物流。在这平台上部署的首个像素是一个全新的3.2 µm设计,提供出色的全局快门成像性能以及低噪声和高动态范围。这XGS像素(“X”即X-Class,“GS”即全局快门)能够在紧凑的尺寸内开发高分辨率、高性能的工业图像传感器,例如全新XGS 12000和XGS 8000图像传感器。
实时渲染引擎中需要一个用以控制自动驾驶的车辆和一个捕获当前场景图像的相机传感器,由于CARLA中车辆的物理模拟使用了相同的蓝图作为实现,所以在该平台上选择哪种车辆作为控制车辆是无关紧要的。选取28种车辆中的Tesla Model3作为控制车辆,传感器选择普通RGB单眼传感器,位于相对车辆中心前方1.6m处,相对地面高1.4m,FOV取为100,画面分辨率为800x600,帧率为25Hz。相机捕获的场景画面如图5所示:
穿戴式触觉传感器通常构建在类似皮肤的弹性基底或者可伸缩的织物上以获得柔性和可伸缩性。从换能机理来看,触觉传感主要应用了压阻式、电容式和压电式等传感技术,每种传感原理都有其特点和适合的应用场所。随着材料科学、柔性电子和纳米技术的飞速发展,器件的灵敏度、量程、规模尺寸以及空间分辨率等基础性能提升迅速,甚至超越了人的皮肤。同时,为了适应对力、热、湿、气体、生物、化学等多刺激分辨的传感要求,器件设计更加更精巧,集成方案也更加更成熟。具有生物兼容、生物可降解、自修复、自供能及可视化等实用功能的智能传感器件也应运而生。此外,穿戴式电子产品朝着集成化方向发展,即针对具体应用将触觉传感器与相关功能部件(如电源、无线收发模块、信号处理、执行器等)有效集成,打造具有良好柔性、空间适应性和功能性的穿戴式平台。
浊度仪测量原理:由光源组件发出的一束入射光线照射到水中的悬浮颗粒上,颗粒向四周发出散射光,检测器检测与入射光成 90°角的散射光。测量散射光比测量透射光的测量方法提高了分辨率度和重复性,红外传感器发射器发送的光波在传输过程中经过被测物的吸收、反射和散射后仅有一小部分光线能照射到接收器上,透射光的透射率与被测溶液的浓度成比例关系,通过测量透射光的透射率计算浊度值。
华为P50 Pocket的超光谱超级影像单元由由4000万像素原色摄像头、1300万像素超广角摄像头、激光对焦传感器以及全新加入的3200万像素超光谱摄像头、10通道多光谱传感器、超光谱补光灯组成,得益于10通道多光谱传感器对光线传播路径的感知,让照片的色彩和分辨率提升更精准。