P+F洗车机传感器目前,工业现场使用的三轴速度传感器输出的信号是电压信号,在复杂的工业环境下因为各种工业电气噪音干扰,传感器输出的信号传送到控制中心时往往叠加了各种干扰信号,直接将其送入数据采集终端进行模数转换,实际精度和线性度大受影响;另外,工业现场往往需要将传感器输出的信号通过很长的传输线进行传输,传输线的电阻会产生电压降,那么接受端的信号就会产生误差;还有,工业现场环境复杂,往往出现现场接地不可靠的问题,此时传感器的输出信号就会不稳定,出现偏差。

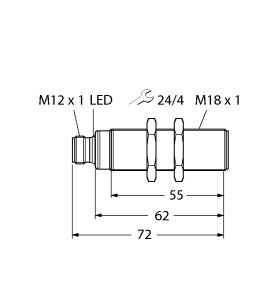
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
威海洗车机传感器汽车行业是最著名的用途,图像在其中起着非常重要的作用。使用这些传感器,系统可以识别驾驶员通常会在道路上注意到的标志,障碍物和许多其他东西。它们在物联网行业中起着非常重要的作用,因为它们直接影响无人驾驶汽车的发展。
资料洗车机传感器感应车门,只要钥匙带在身上,不用拿出来了。就可以解锁车。你说多方便。将手放在驾驶员侧或者前排乘员侧车门把手上的上锁传感器区域,就可以让四车门上锁。通俗点说手放在上锁传感器外侧,即上锁。不用拿出钥匙锁车了。您只需将手直接放入门把手解锁传感器区域,四车门将自动解锁,拉动左前或右前车门把手,车门将打开。基本上手握把手,解锁了,有声音的,一拉,车门开了。注意感应车门只有前面两个门有,后面两个门没有,好处是啥呢?我们都有强迫症,总是想:到底锁没锁上车啊。呵呵,后门拉一下就知道了。
P+F洗车机传感器APR5852 配置了专用的 ASIC 传感器芯片、硅微结极压力传感器,并使用了模拟输出。APR5852 高性能压力传感器可以直接安装在标准的 PCB 板上,经过放大、高精确性、校准过的压力信号通过模拟输出。每一个传感器的出厂都经过严格的校准和测试,保障并满足客户的大规模应用。工作电压 4.75~5.25V,平均工作电流小于等于5mA,可以工作在-40℃~125℃,响应时间为 2ms。
威海洗车机传感器解决方法:当仪器在打开和关闭电源来回切换时,由于绝热膨胀和压缩效应凝结水滴,附着在管路中,影响抽真空的效率。检查真空泵和真空腔内是否有水滴附着,一般在去除水滴后,仪器能恢复正常;如果过滤头有堵塞,会减少从外部进入的空气,降低真空泵转速,甚至使真空泵停止工作。根据过滤头颜色是否发黑,确定是否更换;小心清理真空泵鼓膜上的灰尘或者异物;判断漏气,可以用短接的方法,把真空泵与压力传感器直接连接,跳过真空腔和管路。若此时恢复正常,则证明管路或真空腔漏气。若没有继续报警,则判断为电路板问题,需专业技术人员更换。通过以上检查故障即可排除。
资料洗车机传感器为了验证本文提出的多传感器融合算法,本文利用笔者团队搭建的组合设备在某所C7试验场进行测试。图 2(a)多传感器融合实时测试设备;图 2(b)是试验场景图,图 2(a)中的箭头所指的区域为伪卫星信号发射系统,试验场地一共有8颗伪卫星,为了消除伪卫星钟差,使用了阵列天线,由图 2可以看出,伪卫星结构分布较差,且都分布在房屋顶部;图 2(b)中的箭头所指的区域为光电捕捉系统设备,试验场所二楼一周都布满了该设备,长和宽大约都是20m。本研究利用光电捕捉设备测量的数据作为真值进行参考,视觉定位部分采用小觅双目相机标准版。为了验证本文提出的融合算法,使用搭建的测试设备分别采集两组场景数据(长度分别为41m和271m)进行对比分析。绝对轨迹误差(ATE)直接计算相机位姿的真实值与系统的估计值之间的差,首先根据位姿的时间戳将真实值和估计值进行对齐,然后计算每对位姿之间的差值,该标准适合于估计系统的漂移。
在这里,霍尔器件起位置传感器的作用,检测转子磁极的位置,它的输出使定子绕组供电电路通断,又起开关作用,当转子磁极离去时,令上一个霍尔器件停止工作,下一个霍尔器件开始工作,使转子磁极总是面对磁场,霍尔器件又起定子电流的换向作用。无刷电动机中的霍尔器件,既可使用霍尔元件,也可使用霍尔开关电路。使用霍尔元件时,一般要外接放大电路;使用霍尔开关电路时;可直接驱动电动机绕组,使线路大为简化。
在物理传感器中又可分为物性型传感器和结构型传感器、所谓物性型传感器是利用某些功能材料本身所具有的内在特性及效应把被测量直接转换为电量的传感器。如利用压电晶体制成的压力传感器,就是利用压电材料本身所具有的正压电效应而实现压力测量的;又例如光敏电阻,则是利用半导体材料对光强的变化使其电导率发生变化的所谓光电导效应而制成的传感器。结构型传感器是以结构(如形状、尺寸等)为基础,利用某些物理规律实现把被测信息转换为电量,例如气隙型电感式传感器,它必须由按规定尺寸制成的铁芯、一定匝数的线圈以及和铁芯有一定间隙的衔铁组成,只有满足这些结构与尺寸上的要求,才能保证在被测量使衔铁与铁芯间间隙变化时使其磁阻变化,从而产生相应的电信号;又例如电动式传感器,它是由一定形状的磁靴和在其间隙中运动的线圈组成,这种结构保证其能在线圈运动时切割磁力线,从而在线圈中感生与被测速度v成对应关系的电动势。
汽车有故障码时,它会有不同的故障现象。如汽车曲轴位置传感器有故障产生故障码,它的故障现象非常明显,直接导致汽车不能发动。但有些传感器有故障产生故障码,故障现象非常不明显,如出现进气温度传感器故障码,表明进气温度传感器的线路或本身有故障,但这个故障往往很难凭感觉发现。而有时有故障码,却不一定有故障,这主要是因为外界干扰、维修人员的误操作、虚假故障等影响所致。有时,当有故障现象时,一定存在故障,但不一定有故障码。这是因为故障码是由控制电脑的自诊断系统定义的,凡不受电脑控制约束的故障点,都无法产生故障码。另外,当存在机械故障时,故障现象比较明显,但自诊断系统就不一定产生故障码。因此,有故障码而不一定有故障,没有故障码不一定没有故障。
自动化机器或製程中,常需要以位移传感器感测物体距离远近或存在与否,例如於输送带上计算物品通过之数量,又或者是必须测量工件与加工机器之间的距离以取得数据资料进行控制等等。依感测方式而言,位移传感器可被区分為接触型与非接触型两种,一般来说,接触型位移传感器有动作单纯、电路设计简单等优点,但因為感测时必须与物件直接接触,久而久之便会因接触部分金属疲劳而出现变形、断裂、接触不良等结构损坏情形,再者亦有一些物件本身便不适合以直接接触的方法进行感测,例如质轻、脆弱、昂贵之物品,又或者是液体,此时便需以非接触型位移传感器来进行量测。