P+F接近开关冯麓,一个学工的理学博士,2012毕业于中国科学院研究生院。现任中国科学院国家天文台副研究员。主要研究方向为自适应光学及钠激光导星激光器相关技术。非常有幸能够从博士期间到现在先后参与VLT,ELT,TMT自适应光学相关技术的研发,并在近两年参与到国内建设大口径光学/红外望远镜的前期筹划工作当中。

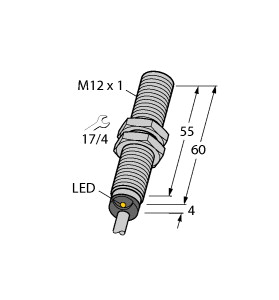
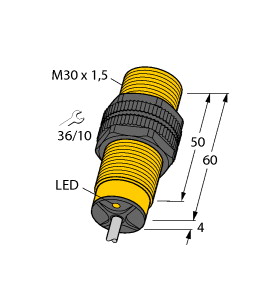
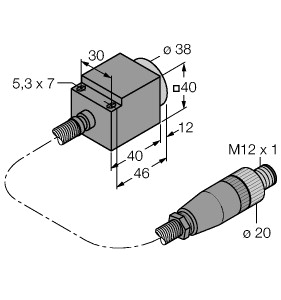
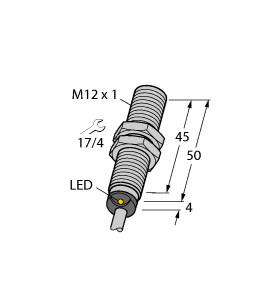
(P+F 电感式传感器 NBB2-8GM30-E0-5M-PUR)
2 mm 齐平,更远的工作距离,温度范围扩大
-40 ... +85 °C
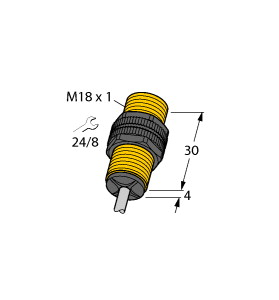
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 2 mm 安装 : 齐平 输出极性 : DC 确保操作距离 : 0 ... 1,62 mm 驱动器件 : 软钢,如 1.0037、SR235JR(之前为 St37-2)
8 mm x 8 mm x 1 mm 衰减系数 rAl : 0,4 衰减系数 rCu : 0,3 衰减系数 r304 : 0,75 衰减系数 rBrass : 0,45 输出类型 : 3 线 工作电压 : 5 ... 30 V 开关频率 : 0 ... 6000 Hz 迟滞 : 典型值为 5% 反极性保护 : 反极性保护 短路保护 : 脉冲式 电压降 : ≤ 1,5 V 工作电流 : 0 ... 100 mA 断态电流 : 0 ... 0,2 mA 空载电流 : ≤ 10 mA 可用前的时间延迟 : ≤ 100 ms 开关状态指示灯 : 黄色 LED MTTFd : 960 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : UL 认证 : cULus 认证,一般用途,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 PUR , 5 m 线芯横截面积 : 0,14 mm2 外壳材料 : 黄铜,镀镍 感应面 : LCP 防护等级 : IP67 电缆 : 供货范围 : 包含 2 个六角螺母
临沂接近开关设施温室影像采集与环境监测机器人系统设计及应用截至2017年,中国设施园艺的总面积达370万hm²,以分布于辽宁、山东、河北等地的塑料大棚、中小拱棚为主,占设施园艺总面积的63.42%。受人口老龄化、城镇化等因素的影响,中国务农人口数呈下降趋势,逐步增加的人力成本对设施作物智能化种植和管理提出了更高要求。随着人工智能科技的迅速发展和农业信息化向智能化方向的转变,“机器代替人力”“电脑代替人脑”成为可能。农业物联网相关技术、体系架构在农业中应用经过试验而趋于成熟,在数据采集、远程控制均有应用。
订货接近开关 两个探测器以完全相反的方向飞行,它们传回了大量珍贵的照片,近距离观测了木星、土星、天王星、海王星和冥王星,探测它们的磁场,空气状况,发现了若干新的卫星。目前它们已经进入柯尔柏带,距离地球200多亿公里。在太阳系的边缘,传回的信息显示,它们遇到了火墙,温度高达近50000摄氏度,这完全超出了我们原本对太阳系的认知。科学家猜测这可能是太阳粒子到达的最远处,它们在此聚集形成的。
P+F接近开关神经退行性疾病仍然在当前的神经科学领域内拔得头筹,尤其是针对阿尔茨海默病与帕金森病的机制以及策略研究与探索;星形胶质细胞、小胶质细胞还是最热门研究方向;另外神经炎症研究重回视线;深度学习以及类似的人工智能学习与神经影像技术开始变得炙手可热;经颅磁刺激和经颅电刺激疗法有了新的解读与治疗建议;单细胞分析与转录组空间基因表达技术受到高水平期刊青睐,最后为大家更新入选此轮排名的NRR文章。
临沂接近开关资料显示,小鹏的辅助驾驶XPILOT包括车道居中辅助(LCC)、自适应巡航(ACC)和自动变道辅助(ALC)功能等功能。其中,LCC主要通过挡风玻璃上的摄像头对路上车道线进行检测,辅助控制方向盘,使车辆保持在两条车道线中间行驶。ACC则是通过雷达传感器、摄像头进行感知,对前方车辆和当前限速进行检测,辅助车主对车辆加减速的控制。当检测到前方没有车,系统就保持设定的速度自动前行;当检测到前方有车,就保持车距,自动跟行和减速。
订货接近开关通用两条腿走路非常稳妥,不像Waymo这些科技公司只专注无人驾驶,因为无人驾驶离我们太远了,没有方向盘和油门刹车,落地时间遥遥无期,而传统车企需要一步一步往前走,通用无人驾驶领域的成就其实可以下放到乘用车自动驾驶领域,让消费者也能尽快享受这种便利。
从应用服务方向的角度来看,包括水路交通、陆路交通、空中交通在内的交通产业主要是朝着智能化交通管理、智能化交通服务、智能化决策支持三个方向发展。从行业发展进程的维度来看,智能交通相关技术已在公路智能化、城市交通智能化管理与服务、公众出行智能化服务等多个领域得到了广泛建设与应用。
伺服电动机布置在凸轮轴上方。伺服电动机用于调节偏心轴,而伺服电动机的蜗杆嵌入安装在偏心轴上的蜗轮内。进行调节后无需特别锁止偏心轴,因为蜗杆传动机构具有足够的自锁能力。偏心轴扭转可使固定架上的中间推杆朝进气凸轮轴方向移动。但由于中间推杆也靠在进气凸轮轴上,因此滚子式气门压杆相对中间推杆的位置会发生变化。凸轮轴旋转和凸轮向中间推杆移动使中间推杆上的斜台发挥作用。斜台推动滚子式气门压杆,从而使进气门继续向下移动,进气门因此继续开启。
(3)执行中枢。由可横向控制运动的滑轮、纵向控制升降的双柱结构和可多角度操控方向、焦距的高清摄像头机构组成。通过执行中枢横向和纵向四自由度运动,获取行间和株间最佳观察位置,同时与视角感知中枢的紧密配合实现精确定位。该结构水平移动最大距离27 m,移动速度为1~15 m/min,垂直升降最大距离1.5 m,升降速度为0.9~3.6 m/min。
物联网传感器芯片和健康可穿戴设备芯片是久好电子的主要研发方向,久好电子在超低功耗数模混合集成电路设计、极低功耗射频集成电路设计、低功耗SoC系统设计、系统与芯片设计与专业应用软件开发等领域拥有雄厚实力,为合作伙伴提供核心技术产品及完整解决方案。