P+F接近开关图1. 几种多模态特征提取的方法。2. 注释的稀缺性(Annotation Scarcity)深度学习依赖大量的标记数据,然而,如此大量的可靠标记数据并不总是可获得的,原因有二:1. 注释过程是昂贵、耗时且非常繁琐的;2. 标注过程容易受到各种噪声源的影响,如传感器噪声、分割问题以及不同人之间活动的差异,这使得标注过程容易出错。本文将解决注释稀缺性的方法分为两类:无监督学习(Unsupervised Learning)和半监督学习(Semi-supervised Learning)。其中,在没有任何标记数据给定真值的情况下,无监督学习至今仍然无法独立完成行为识别。因此,半监督学习的人类行为识别方法是最近的趋势。本文列举了三种常用于行为识别系统的半监督学习方法,分别是:协同训练(Co-training)、主动学习(Active Learning)和数据增强(Data augmentation)。3. 类不平衡性(Class Imbalance)类不平衡性是由于一些特定活动的传感器数据很难获取,比如老年人摔倒等等。此外,在不受限制的条件中记录的原始数据天然地是类不平衡的。当使用不平衡的数据集时,传统的模型倾向于预测训练样本数量较多的类别而忽略训练样本数量较少的类别。因此,类别失衡问题的解决迫在眉睫。4. 数据的异质性(Heterogeneity)许多最新的人类行为识别方法都假设训练数据和试验数据是独立同分布的。然而,这是不切实际的。这是由于行为识别的传感器数据是异质的。传感器数据的异质性可以分为三类。首先是用户的异质性(Heterogeneity with Users)。由于生物和环境因素,同样的行为由不同的人实施可以有不同的表现。例如,有些人走得很慢,有些人走得很快。第二个异质性与时间有关(Heterogeneity with Time)。在动态流环境中,行为的数据分布随着时间变化(Concept Drift),新的行为也可能出现(Concept Evolution/Open-Set)。第三类异质性与传感器有关(Heterogeneity with Sensors)。用于人类活动识别的传感器通常是敏感的。一个小变化会对传感器数据造成很大的干扰。可能导致传感器异质性的因素包括传感器实例(Sensor Instances)、类型(Sensor Types)、位置(Sensor Positions)和布局(Sensor Layouts)。考虑到以上三种类型产生的数据异质性,且在现实场景中识别系统常常在无约束的情况下布置传感装置,我们可以观察到训练数据和测试数据两者之间的分布差异,因此,无缝的深度学习模型对于行为识别是必要的。

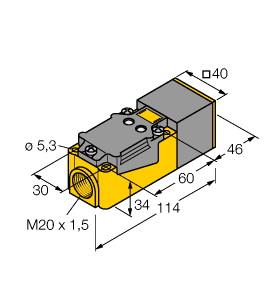
(P+F 电感式传感器 NBN12-18GM50-E0-M1)
12 mm,非齐平,更远的工作距离,温度范围扩大
-40 ... +85 °C,密封性增强,防护等级
IP68 / IP69K,E1 型式批准
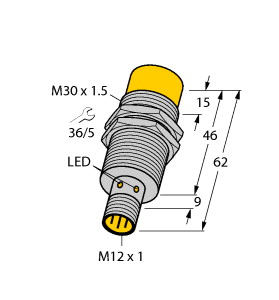
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 驱动器件 : 软钢,如 1.0037、SR235JR(之前为 St37-2)
36 mm x 36 mm x 1 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,45 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 7 ... 30 V 开关频率 : 0 ... 1200 Hz 迟滞 : 典型值为 5% 反极性保护 : 反极性保护 短路保护 : 脉冲式 电压降 : ≤ 2 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 4 µA 在 25 °C 时 空载电流 : ≤ 10 mA 可用前的时间延迟 : ≤ 100 ms 开关状态指示灯 : 黄色 LED MTTFd : 1484 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : UL 认证 : cULus 认证,一般用途,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 PUR , 2 m 线芯横截面积 : 0,34 mm2 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 质量 : 90 g 供货范围 : 供货范围包含 2 颗自锁螺母
滨州接近开关比如,全球制动系统领域头部供应商布雷博(之前主要供应卡钳、制动盘等产品)在去年重磅推出其首创的全新智能制动系统SENSIFY™,将踏板位移与制动力传导解耦,当驾驶者踩下制动踏板,通过踏板位移传感器来识别制动意图,并通过电机来完成建压过程。
原厂接近开关【摘要】针对井下车辆高精度惯性导航成本较高、低成本MEMS惯性传感器漂移较大等问题,提出一种井下多传感器组合导航系统,该系统通过蓝牙测距信息、MEMS惯性传感器及车载里程计信息进行组合导航。利用卡尔曼滤波技术融合多传感器数据,结合蓝牙测距信息抑制MEMS惯性传感器漂移,提高车载惯性传感器在一段时间内的定位精度;通过MEMS惯性传感器预测车辆位置,有效滤除干扰标签的蓝牙信号,提高数据可靠性;融合车辆里程计数据后,定位结果更加稳定可靠。测试结果表明,在井下蓝牙标签间隔10 m布站情况下,每10 m定位误差在3.2 m以内,能够满足井下导航要求。
P+F接近开关传感器设备和物联网的广泛应用使得基于传感器的人类行为识别成为可能。然而,这个领域仍然存在一些重大挑战(challenge),可能会影响行为识别系统在实际应用场景中的性能。在这篇论文中,来自新南威尔士大学、西北工业大学、密歇根州立大学的研究人员综述了近期被用于解决具体行为识别挑战的深度学习方法,并提出了一种基于挑战的分类体系。
滨州接近开关加州电网系统运营中心管理着加州超过80%的电网,向3500万用户每年输送2.89亿兆瓦电力,电力线长度超过25000英里。该中心采用了Space-Time Insight的软件进行智能管理,综合分析来自包括天气、传感器、计量设备等各种数据源的海量数据,预测各地的能源需求变化,进行智能电能调度,平衡全网的电力供应和需求,并对潜在危机做出快速响应。中国智能电网业已在尝试类似大数据预测应用。
原厂接近开关受益于传感器技术和物联网的发展,线下的用户行为洞察正在酝酿。免费商用WIFI、ibeacon技术、摄像头影像监控、室内定位技术、NFC传感器网络、排队叫号系统,可以探知用户线下的移动、停留、出行规律等数据,进行精准营销或者产品定制。
在传统计算机体系架构中,处理器与内存之间有限的数据带宽限制了系统整体效能与效率的提升,使其无法满足当前物联网和大数据等新兴应用领域的传感器终端收集海量数据需求[5-6]。以MRAM为代表的新型非易失性存储器中可以直接在存储器中实现率与低能耗的,因此成为下一代计算体系架构的研究热点[7-10]。早期的方案通过在存储阵列内部[7]或外部[8]添加控制逻辑电路实现对数据的预处理来实现存内位逻辑运算。PATTERSON D等人随后提出了直接利用存储单元的外围电路(如)实现存内位逻辑运算的方案,进一步减少了芯片的面积与功耗[9]。基于MRAM的存内位逻辑运算方案主要以1T1MTJ[7]、2T2MTJ[9]等典型存储阵列结构为核心。为了在每个运算单元中实现多种运算功能,附加的逻辑控制操作数也被引入2T2MTJ阵列中来实现位逻辑“与”、“或”、“与非”和“或非”的运算[9]。
与此同时,索菲莉尔智能床配备强大的非接触式力学传感器,独有的智能检测系统时刻监测父母睡眠状态及健康程度,无论相隔多远,都能够通过智能应用软件了解家人的健康状况。大数据后台分析睡眠情况,生成睡眠质量报告,为家人提供专业睡眠改善方案和制定标准。如果家中老人独居,这是一个监测他们健康状况的神器。
另有188辆进口C级AMG汽车召回原因为车辆ESP系统可能不适应安装的制动器类型。如果出现横摆角速度传感器漂移或制动真空供应故障,ESP系统可能不会按预期响应。这可能导致ESP干预与驾驶情况不符,可能增加碰撞或受伤的风险,存在安全隐患。
井下定位为一种特殊的室内定位,所受限制较多,如室内在二维平面上可以使用RSSI算法交汇得到蓝牙定位信息,但在井下巷道条件下只能获得蓝牙定位的区域信息。井下纯惯性导航要想得到较高精度,成本较高,而低成本MEMS(Micro-Electro-Mechanical System,微机电系统)惯性传感器漂移较大,惯性导航短时间内就会发散,导致无法使用。针对该问题,提出井下多传感器组合导航系统,采用低成本MEMS惯性传感器、蓝牙传感器、里程计组合导航方法,利用卡尔曼滤波技术融合多传感器数据,得到高精度井下定位结果,配合车载终端,为井下车辆和地面监控室提供实时、准确的导航监控信息,方便车辆调度、安全管理等。