P+F接近开关虽然长虹“熊猫懒”空调只有一个按键,但是这一个按键却浓缩了长虹的技术精华。在以往空调的操作中,用户需要自己去调节温度、风速、风向等等参数,而长虹“熊猫懒”空调搭载了先进的AI技术,结合丰富的传感器,能够智能感知室内的温度情况,用户一键开启后,“熊猫懒”空调就会自动调节冷热模式、风量和温度,把室内温度调节到一个极度舒适的状态。对于当下快节奏生活的年轻人而言,长虹“熊猫懒”空调的便捷,无疑为他们节省下更多的休息时间,创造了一个难得的“慢节奏”空间,在这个空间里,他们可以充分享受长虹“熊猫懒”空调带来的舒适,放松自己的身心。

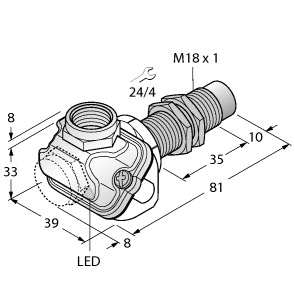
(P+F 电感式传感器 NBN12-18GM50-E0-M-150MM-3DT04)
8 mm,齐平,温度范围扩大
-40 ... +85 °C,E1 型式批准,抗扰度提高至 100 V/m,密封性增强,防护等级
IP68 / IP69K,出色的耐冲击和防振性能
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,4 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 5 ... 60 V 开关频率 : 0 ... 1500 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 感应过电压保护 : 是 浪涌抑制 : 是 电压降 : ≤ 2 V 额定绝缘电压 : 60 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 0,1 µA 在 25 °C 时 空载电流 : ≤ 7 mA 可用前的时间延迟 : ≤ 220 ms 开关状态指示灯 : 黄色 LED MTTFd : 1085,5 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 缆线连接器 Deutsch DT04 , 3 针 有 PUR 电缆 125 mm 线芯横截面积 : 3 x 0.75 mm2 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 连接器 : 电缆 : 注意 : 模制 连接器
莱芜接近开关传感器作为物联网技术最重要的数据采集入口,将迎来广阔的发展空间。瞄准这一点,上马街道引入青岛中物云传智能科技有限公司和中科院上海硅酸盐研究所合作,在青岛新一代信息技术产业园内打造中青科智能传感器科技产业园。该项目总投资30亿元,规划建设四大研发中心、四大示范基地、半导体芯片集成平台、物联网产业大厦、总部办公港、国家级传感器产业基金中心和中青科山东新旧动能转换基地。
原装接近开关现在IoT和AI的兴起,也大部分都是基于移动终端设备、传感器和互联网传输或者SIM卡通信以及云计算、大数据技术的,但是其中涉及到的理论原理仍然如上所述。由于受时间和空间的限制,过去对于控制理论的应用主要是体现在工业控制上,因为工业控制主要发生在厂房车间等有限的距离范围内。现在随着移动互联网、传感器和无线通讯技术的发展,时间和空间已经不再是信号、数据传输的障碍,远场通讯和实时控制得以成为现实,再加上大数据分析,使得控制理论中的正负反馈更加精准有效,所以出现了以共享单车为代表的IoT应用方案。
P+F接近开关熊猫车型的发动机舱特别小,检查车况的时候几乎可以一览无余。这种小车如果发生过什么大的事故是很好看出的,因为狭窄的机舱空间让事故的痕迹很难被隐藏。当然,作为一款市内代步小车,车主用车也大多是以市内通勤为主,熊猫出现重大事故的可能性也不是很大,我们在验车的时候稍微多注意一下几个关键的部位就可以了。不过因为吉利于2016年就停产了熊猫车型,所以现在二手车市场上的熊猫普遍会存在车龄较大的问题,诸如火花塞和传感器这些零部件的性能都会有不少的下降。为了安全起见,在入手这么一台小车之后一定要及时给它做一次全面的检查,把老化的零件换掉。
莱芜接近开关横河DRS数字远传液位测量应用介绍横河DRS数字远传液位测量应用介绍!液位测量是过程工业中最基本也最重要的测量之一。不准确的液位测量可能引起液体溢流,损坏输送设备,影响库存控制,导致资产损失、安全隐患以及环境问题等。而精确的液位测量可以帮助减少过程中的不稳定变化,从而提高产品质量,降低成本并减少浪费。此外,日益严格的监管法规对过程控制提出了更高的要求,促使企业寻求更精确、更可靠的液位测量系统。问题与挑战隔膜密封式差压变送器采用毛细管传递压力,在高罐体和大温差等应用条件下测量液位时存在诸多限制:由于大气压(托里切利真空)等因素,变送器主体与低压侧连接点之间的距离不宜超过10 m,否则可能引起测量误差影响输出精度;由于太阳辐射等周围环境因素,高压侧和低压侧之间的温度差可能导致毛细管封入液的膨胀和收缩,引起测量误差;由于低温环境(例如冬天)导致毛细管封入液的粘度降低,引起压力传递延迟等问题。机械式的浮子液位计/浮筒液位计,安装和调试的难度大费用高,附加设施占据空间且维护成本较高。解决方案数字远传(DRS)系统采用两个独立的压力传感器,分别设置于高压侧(主)和低压侧(从)测量压力并通过专用通信电缆进行双向通讯,再由主传感器进行差压计算并输出4~20 mA模拟信号或者数字信号。由于传感器之间通过专用电缆进行通信,代替传统隔膜密封系统的毛细管传递压力方式,从而消除了大气压和环境温度等因素带来的不良影响。此外,数字远传(DRS)系统在DTM功能中内置储罐量测程序,其中包括数种基本的容器设计。用户只需输入所要求的细节信息,DTM即可计算出正确的输出系数,从而节省了变送器的设置时间。高低压侧之间使用专用电缆传输信号(最长可达100m)消除大气压和环境温度的不良影响易于安装和维护,节省空间和时间支持更大的测量范围,可达50MPa适用于寒冷气候,消除伴热成本典型应用大间距液位测量如高罐/球罐/蒸馏塔等设施的液位测量,由于高低压侧距离跨度大,毛细管过长可能导致受大气压和温度的影响造成测量误差。数字远传(DRS)系统使用专用电缆代替毛细管从而能够最大程度地减少不良影响,提高监测系统的稳定可靠性。大温差环境液位测量例如油罐库区由于太阳辐射不均,可能出现部分处于直射之下和部分处于阴影之中的情况,造成高低压侧之间较大的温差,导致测量误差等问题。数字远传(DRS)系统使用专用电缆代替毛细管从而最大程度地消除由太阳辐射和环境温度变化带来的影响。低温环境液位测量位于外部的油罐库区在冬季时可能暴露于极低的环境温度下,需要伴热以防止毛细管封入液粘度降低甚至冻结。数字远传(DRS)系统使用专用电缆代替毛细管从而消除了伴热的需求,降低了安装和维护的成本。
原装接近开关一个有效的方法是:将主动光聚集起来,然后扫描。这里有主动光设备可选的三种机制,第一个是像 Microsoft Kinect 那样,光就这么发散着打到空间中;第二个是将光聚集到一条线上,然后使用一维振镜进行一维扫描,这也是我们的传感器使用的方案;第三个是将所有光聚集到一个点上,然后使用二维振镜进行扫描。从信噪比上看,第二种机制比第一种机制,也就是 Microsoft Kinect 使用的机制增加了 N 倍, N 可以认为是 1000. 第三种机制的信噪比提高了 N^2 倍。从帧率的角度看,第一种是最快的,但是它没法在太阳光下面工作。第三种尽管信噪比很高,速度超级慢。第二种,也就是我们使用的机制,既有较高的信噪比保证可以在阳光下使用,又有较快的帧率。
据介绍,AS621x系列温度传感器具有功耗低、占用空间小的优点,可在多种应用条件下提供出色性能;小尺寸,1.5mm2晶圆级芯片封装(WLCSP)可轻松集成到现有或未来设计中;超低功耗有助于在新的消费电子设备中实现数字化温度传感;三种精度版本,便于客户根据需求选择最合适的产品。
使用中,科沃斯地宝X1 OMNI的地图构建方式已经和以前不同了。科沃斯地宝X1 OMNI现在只需要在目标区域中间走一段路,无需进行边缘探路,就已经能完成快速建图。在3米 x 6米的测试空间中,科沃斯地宝X1 OMNI几十秒就完成建图。这里限制建图速度的,其实是科沃斯地宝X1 OMNI的运动速度,而不是传感器和AI芯片的性能了。
因此,工业互联网时代,传感器是网络互联数据产生的根源,是工业互联网的神经末梢,为工业互联网全生态构建提供最基础的数据支撑。“如果我们将一个系统或者说是一个稍微智能的系统CYBER空间数据流动的闭环过程描述为‘状态感知-实时分析-自主决策-精准执行-学习提升’的话,那么传感器就提供了数据的最前端即最初始的来源,为系统提供了数据支撑。”
对于一般反射率的物体,我们的传感器可以看到 13m 远。这里我们通过 sweeping 40 个 planar curtains 来合成一个 depth map。需要注意的是,我们的传感器一般不用做 depth sensor,而只是用作 half depth sensor,就是只是监测空间中某个预设的 depth,所以更准确的讲,是一个 proximity sensor。接下来我们看下我们的传感器在散射介质,比如烟雾中的表现。在烟雾中,如果使用传统的成像,那就是有一个光源,然后有一个 2D 相机。相机中的每个像素除了接收到物体反射的光之外,还接收到在烟雾媒介中散射的光。这些散射的光中既有散射一次的,也有散射多次的。在我们 light curtain 成像中,我们线激光打出去,线相机接收,对于线相机上的每个像素,它除了接收到物体反射的光外,也会接收到烟雾媒介散射的光,但是在媒介中只散射一次的散射光是进不来的,也就是在光路中就被隔离掉了。相较于传统的成像,我们的成像隔离掉了只散射一次的散射光,而只散射一次的散射光的强度要比散射多次的光强很多倍。由此,我们的传感器成的像的对比度要比传统的成像高很多。这是我们的传感器在烟雾中的表现。中间的视频是普通的相机得到的,右边是我们的传感器得到的。当有烟雾时,通过我们的传感器依然能看到路牌,但是普通的相机就看不到了。