P+F接近开关人工智能课程类导学人工智能是交叉学科,摆在初学者面前,IT从业者面前,制造行业从业者面前,数据分析人员面前等等地从业者不少人陷入迷茫状态,人工智能到底应该学习哪些内容?我想从事智能化相关工作,如何从本专业切入到人工智能领域?这里我来阐述下人工智能从业者应该具备哪些基础和技能,在校大学生或者已经是软件工程、嵌入式开发、数控机床设计制造人员等等社会工作者可以参考并不断提升自己的技能。不同的高校可能在人工智能的侧重点不同,比如物联网的师资力量可能更侧重于物联网智慧城市方面,或者智能传感器方面,不过在基础课程方向上基本是一致的。

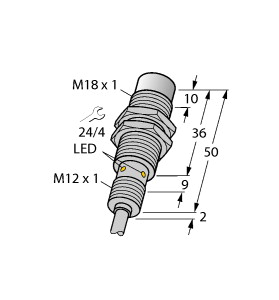
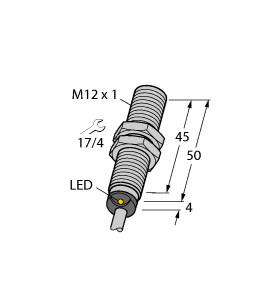
(P+F 电感式传感器 NBN12-18GM50-E0)
12 mm,非齐平,更远的工作距离,温度范围扩大
-40 ... +85 °C,工作电压范围扩大,具有多种安装选择,使用灵活
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 驱动器件 : 软钢,如 1.0037、SR235JR(之前为 St37-2)
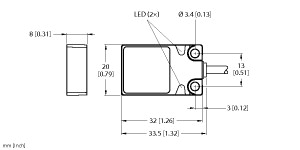
36 mm x 36 mm x 1 mm 衰减系数 rAl : 0,49 衰减系数 rCu : 0,46 衰减系数 r304 : 0,75 衰减系数 rBrass : 0,55 输出类型 : 3 线 工作电压 : 5 ... 36 V 开关频率 : 0 ... 1300 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 电压降 : ≤ 1 V 工作电流 : 0 ... 200 mA 断态电流 : 最大 20 µA 空载电流 : ≤ 10 mA 可用前的时间延迟 : ≤ 10 ms 开关状态指示灯 : 黄色 LED MTTFd : 1708 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % PWIS 符合性 : VDMA 24364-C1/T100°C-W 符合标准 : EAC 符合性 : TR CU 020/2011 防护等级 : II UL 认证 : cULus 认证,一般用途,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 外壳材料 : 黄铜 , 白青铜 带涂层 感应面 : PBT , 绿色 防护等级 : IP68 电缆 : 质量 : 110 g 拧紧扭矩 : 0 ... 30 Nm 供货范围 : 供货范围包含 2 颗自锁螺母
菏泽接近开关为什么很多人代码不写注释先上图 如上所示,我代码注释 很多公司 尤其是刚创业的小公司 代码几乎没有一行注释,也没有文档,这让接手人很痛疼,也影响新人的成长速度。那么到底为什么呢? 我猜想可能是:1,创业公司基于发布产品 来不及写 2,领导不重视,员工没习惯 3,写代码的人觉得自己很牛逼,觉得自己代码很清晰 不用注释 4,写代码的不想让别人那么容易滴看出自己的思路,怕别人抄袭自己的技巧 假设能够承受工作量是 1 实际工作量是 1 的时候,写简要的类和方法注释 实际工作量是 0.8 的时候,写较为详细的注释 实际工作量是 0.6 的时候,在 0.8 的基础上考虑一下性能、弹性、安全性 实际工作量是 1.2 的时候,写个简单的类注释 实际工作量是 1.4 的时候,没有注释 实际工作量大于 1.6 的时候,有 bug 也跟我没关系了 一、写代码要写注释 “写代码要写注释”自从学编程,这就话就伴随着你。可见注释的重要性。 注释的作用: 说明函数的功能 说明函数参数的意思 说明函数这样设计的原理(计算公式) 说明函数的使用场景 作者和日期 说明变量的作用 函数调用方法与注意事项 总之为了能让读这个函数的人明白这个函数的功能,可以注释各种各样的信息。而没有这些注释文字,就不太容易看懂函数的功能与调用用方法。没有注释的情况下,隔一段时间之后,自己也看懂的自己所写函数的功能了。因此,很多书籍、老师、领导、同事、包括你自己,都会告诉你“一定要写注释,不写是万万不能的”。 二、注释标准格式 其实注释没有特别严格的注释格式,但是为了使得注释整齐简洁。还是会有一些格式的要求的。针对不同开发平台,不同编程语言,都有各自不同的注释推荐格式。(高级一些 IDE 会提供注释快捷键)下面分别列举一些常见的注释格式:/// /// 这个方法的作用就是求两个整数之间的最大值 /// /// 第一个整数 /// 第二个整数 /// 返回比较大的那个数字 public static int GetMax ( int n1, int n2 ) {}1234567Qt_C++/* * @Brief: * @Param: First * @Param: Second * @Return: NULL */void DataManager::SaveValue ( int First,int Second ) {}1234567Java/** * This method inputs a number from the user. * @return The value output as a double. * @exception IOException On input error. */ public double getNumber ( ) throws IOException {}123456 单片机中的 C 语言(格式 1)/* ****************************************************************************************** * 函 数 名 : TMC26X_ReadWriteByte * 功能说明 : TMC26X 读写一个字节函数 * 形 参 : val 写入值 * 返 回 值 : 读回状态值 ****************************************************************************************** */UINT8 TMC26X_ReadWriteByte ( UINT8 val ) 123456789 单片机中的 C 语言(格式 2)/** * @brief 开始输出指定频率的 PWM 波 * @param frequency PWM 频率 单位 :Hz * @retval 无 */voidBSP_PwmStart ( uint32_t frequency ) {}123456 三、注释类型有哪些? 其实一般没有这个概念,只是本文为了更好的解释说明注释的作用,给分别进行了定义。分别如下: 翻译类型注释 函数编写背景说明注释 实现原理注释 编程技术注释 下面编写一个真实的函数来举例说明各种类型的注释:// 此函数用于建立“温度”与“温度传感器电阻”之间的线性关系 // 编写背景说明注释 // 函数:计算直线公式 // 翻译类型注释 // 功能:通过 2 个点来计算出直线方程的 k 和 b // 原理类型注释 // 参数:w1 第一个温度值,// 参数:z1 第一温度值对应的温度传感器电阻值 // 翻译类型注释,把字母翻译成有实际意义的名字 // 参数:w2 第二个温度值,// 参数:z2 第二温度值对应的温度传感器电阻值 // 参数:k 计算出来的斜率 // 翻译类型注释,把一个字母翻译成实际对应的意义 // 参数:b 计算出来的截距 // 返回值:无 // 编程技术注释 voidJiSuanZhiXianGongShi ( float w1,float z1, float w2,float z2, float* k,float* b ) { float temp_k;// 临时变量 float temp_b; // 使用到饿直线公式为:y = k*x + b // 原理类型注释 // 以下代码通过“代入法”分别计算出 k 和 b temp_k = ( z2 - z1 ) / ( w2 - w1 ) ; temp_b = z2 - temp_k * w2; // 通过指针类型形参返回计算结果 // 编程技术注释 *k = temp_k; *b = temp_b;}123456789 从以上代码注释实例中可以看到,“原理注释”和“背景说明注释”相对来说很重要,如果不写的话,阅读代码的人就看不懂代码。而其余的主要是“翻译类注释”,即把一个字符符号翻译转化为有实际意义的名字(解释其代表的意义)。 四、“其实不用写注释”(^_^ 哈哈哈) 以上说明文字和例子,充分举例说明了“代码注释”的重要性。但是也许你也发现这样一个现象。在实际编码工作中,大部分人是不写注释的。他们为什么不写。是偷懒吗? 嗯,是有偷懒的嫌疑,那么能给出偷懒的理由吗?理由如下: 我写的是应用软件代码,有几万行代码等着我写,如果不是重要的注释,我是不写的。因为给每个函数都配一个汉语注释是不现实的。 软件开发中,大部分注释是“翻译类型注释”,我只要把函数名字和变量名字起合适了,是不需要再去写啰嗦的注释(我要避免过度注释) 切换中文输入法很麻烦,我英语比较好,同事也能看懂。因此我直接用“英语”写函数名字和变量名字即可。不需要写中文注释。 写注释之后还要维护注释,否则注释反而造成了错误的引导,所以我干脆不写。Linus Torvalds ( Linux 内核之父 ) 给出的回复是:“ Read the fu*king source code ”。 嗯,以上的理由也挺充分。那么不写注释的代码是什么样子的,别人能看懂吗,请看如下代码。 使用英语函数名字和变量名字代替“注释”(注意:仅保留原理类型注释)voidGet_K_B_OfLinearFunction ( float temperature1,float resistance1, float temperature2,float resistance2, float* k,float* b ) { float temp_k; float temp_b; //y = k*x + b temp_k = ( resistance2 - resistance1 ) / ( temperature2 - temperature1 ) ; temp_b = resistance2 - temp_k * temperature2; *k = temp_k; *b = temp_b;}123456789 使用合适的“拼音”变量名字代替“注释”(注意:仅保留原理类型注释)voidHuoQuZhiXianFangChengDe_K_B ( float wendu1,float dianzu1, float Wendu2,float dianzu2, float* k,float* b ) { float temp_k; float temp_b; //y = k*x + b temp_k = ( dianzu2 - dianzu1 ) / ( wendu2 - wendu1 ) ; temp_b = dianzu2 - temp_k * wendu1; *k = temp_k; *b = temp_b;}123456789 要不要写注释的结论 很显然,这两个函数例子中几乎没有写注释,仅注释了一个“直线方程的公式”。也就是说我们几乎没有“注释可看”,而我们可以看到的是“函数名字”和“参数变量名字”,然后再阅读函数中的代码实现。阅读代码的人可以准确的知道这个函数的真正功能。在理解的同时,还会对代码有一种“切实”的理解。因此调用这个函数的时候可以做到“心知肚明”。 而如果只看注释不看代码,在调用函数的时候,就会有个“镜中花,水中月”的一种虚幻的感觉。因此还是的阅读一下函数实现代码。 因此,最终的结论是: 在良好“函数名字”和“变量名字”的辅助下(前提下),是不需要写“注释的”。如果要写,只要写“实现原理类型”和“设计背景说明类型”的注释即可。(另外可以专门去阅读一下大型开源软件的源码,看看大牛们是否写注释)。 五、必须需要写完整从4个方面带你快速了解IoT序言
含税运接近开关XSBR和丝胶改性的碳纳米管通过乳胶成膜法制备导电橡胶薄膜,橡胶薄膜受益于XSBR和碳纳米管独特的个性和互补特性(图1)。碳纳米管独特的结构和卓越的性能使其成为橡胶的理想填料。作者选择含有大量亲水性氨基酸的丝胶作为改性剂,以提高碳纳米管在橡胶基质中的分散性,而不会对碳纳米管造成任何化学破坏。发现丝胶能够使碳纳米管在XSBR基质中均匀分散,而无需任何人工添加剂的帮助。FTIR、拉曼光谱和XPS用于验证XSBR/SSCNT传感器中的化学结构和氢键交联网络的形成(图2)。结果表明,少量丝胶修饰的碳纳米管与XSBR的极性羧基形成氢键交联网络,使XSBR/SSCNT传感器具有相当的机械和电学性能。
P+F接近开关虚拟现实技术在机器人中的作用已从仿真、预演发展到用于过程控制,如使遥控机器人操作者产生置身于远端作业环境中的感觉来操纵机器人。基于多传感器、多媒体和虚拟现实以及临场感技术,实现机器人的虚拟遥操作和人机交互。
菏泽接近开关楼宇自动化系统具备多种功能,可在工业和商业环境中提升工作者的舒适度和安全性。使用热释电传感器作为信号采集传感器,通过对传感器探测到的人体信号进行实时或定时采集,管理系统可以通过采集到的信号确保提供适当的空调、安全和照明设置。
含税运接近开关电子科技大学光电学院本科生在IEEE Sensors Journal发表研究成果近日,电子科技大学光电科学与工程学院2019级本科生黄心宇在国际期刊IEEE Sensors Journal(IEEE-传感器期刊)上发表论文《Identify selective forwarding attacks using danger model: promote the detection accuracy in wireless sensor networks》。该工作通过在无线传感器网络中建立人工免疫系统来抵御各种网络攻击,尤其针对最难以检测的选择性转发攻击。黄心宇同学为论文第一作者,光电科学与工程学院吴援明教授为论文通讯作者,电子科技大学光电科学与工程学院为论文第一单位。
通过将传感器连接到织物腕带的顶侧,为每个用于检测两个腕部的弯曲(拉伸)和偏航旋转(弯曲)的设备,准备了一对可穿戴的传感设备。阈值评估用于对变形模式进行分类。通过同时拉伸和弯曲传感器来检测弯曲,而通过纯弯曲来检测偏航旋转。在每个设备中通过压缩模式添加时,总共可能有10种组合输入模式。作者使用了10种可能的模式中的8种来远程控制带有机械手的商用机器人手臂,以完成将物体拾取并移动到目标位置的任务。在该系统中,左右手腕的偏航旋转使机器人分别向左(图6,i)和向右(图6,iii)移动,并且每个手腕的弯曲都使机器人移动前进或后退。传感器上的压缩用于上下移动机器人(图6,ii和v),通过弯曲(图6,iv)和伸展(图6,vi)进行抓握和释放物体。分别在同一时间手腕。
RF(Radio Frequency)能量收集技术是一种重要的能量收集技术,其不仅可以进行能量收集,还可以作为能量传递的重要手段,有工作表明[30]采用RF能量收集技术的传感器网络,通过设计合理的分布式接纳控制算法,其吞吐量可以提高300%,节点平均能量可以增加100%。采用RF能量收集技术时,传感器节点不仅可以以邻节点的发送信号作为能量来源,还可以以主用户的无线电信号作为能量的来源。当传感器节点以主用户的发送信号作为能量来源时,由于无法同时进行能量收集和信道接入,节点面临这样的问题:在某个时刻,到底是接入空闲信道还是进行能量收集?即传感器节点工作模式的选择。最优的模式选择应该达到这样效果:信道空闲时,有足够的能量发送尽可能多的数据;主用户占用信道时,能收集尽可能多的能量。然而,传感器节点无法知道每个时隙信道的确切情况,仅能够利用一些历史信息和经验消息判断出信道处于空闲或者占用状态的概率。在文献[31]中,作者用部分可观察马尔科夫决策过程来描述节点工作模式选择问题,得到了节点工作模式最优选择策略,实现了能量缓存和当前的吞吐量的平衡。JAIN N等[32]提出了一种两阶段的能量收集和频谱共享策略,将节点的工作状态分为两个阶段:第一阶段接收主用户信号,进行能量收集;第二阶段用收集到的能量传输自身数据以及主用户数据。文献[31]和[32]仅考虑一跳节点的情况,文献[33]则在多跳传感器网络中研究模式选择的问题,通过设计最优中继节点选择方法以及确定最佳充电时间长度,实现最小化传感器节点的中断概率。在此基础上,当多跳路径确定时,文献[34]通过分配节点的发送功率和优化节点能量收集时间,在保证主用户传输要求下,最大化传感器网络的端到端吞吐量。
因为所有三个变形模式的输出模式彼此独立,如图1和2所示。在图1F和2中,作者可以解耦组合的变形模式。然而,并非所有传感器信号都是线性的事实使去耦问题变得复杂,并且不能通过矩阵计算来提供简单的解决方案。因此,决定使用机器学习技术对多模变形进行分类。图5A显示了八个不同变形状态(初始状态:无变形,三个单模变形和四个多模变形)的估计结果。在所有情况下,状态估计都是高度准确和可靠的。估计精度始终超过95%(图5B)。
点评 几乎是新车的福克斯,出现发动机警告灯报警等故障,对于客户来说一般都会动怒,本案例作者妥善处理了这个问题。一是检查技术路线正确,不仅凭借所修车辆的故障码,还凭借该车和商品车的前氧传感器波形对比,确认两个前氧传感器失效,经更换后故障排除。二是故障虽与使用燃油有关,但作者没有生硬告知客户该车故障就是使用原因,而是艺术地讲清故障原因,使客户对车辆本身和售后服务表示满意。可见诊断技术至关重要,“话术”极为关键。