P+F接近开关工业物联网将意味着更为广泛的数据连接需求,通过机器学习、数字孪生技术来更好地发挥数据作用,为整体的产线优化提供支撑。而这些数据(包括机器视觉、AR/VR数据)将需要更高的带宽。因此,来自于ICT领域的CISCO、华为等厂商都将目标聚焦于通过OPC UA over TSN的网络架构来实现这一互联需求。OPC UA扮演了数据规范与标准的角色,而TSN则赋予它实时性传输能力。这样的架构可以实现从传感器到云端的高效连接,在很多场景可以直接省略掉传统工业架构中的控制器层,形成一个新的分布式计算架构。

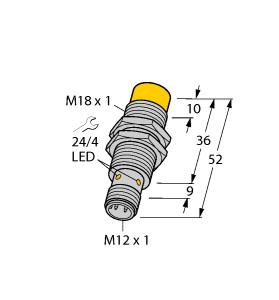
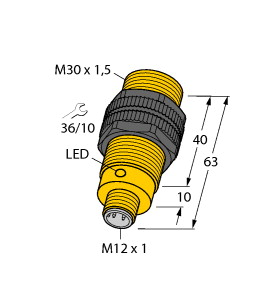
(P+F 电感式传感器 NBN12-18GM50-E0-V1-M)
12 mm,非齐平,温度范围扩大
-40 ... +85 °C,E1 型式批准,抗扰度提高至 100 V/m,密封性增强,防护等级
IP68 / IP69K,出色的耐冲击和防振性能
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,4 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 5 ... 60 V 开关频率 : 0 ... 1500 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 感应过电压保护 : 是 浪涌抑制 : 是 电压降 : ≤ 2 V 额定绝缘电压 : 60 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 0,1 µA 在 25 °C 时 空载电流 : ≤ 7 mA 可用前的时间延迟 : ≤ 220 ms 开关状态指示灯 : 黄色多孔 LED MTTFd : 1085,5 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证,一般用途,2 类电源 CSA 认证 : 通过 cCSAus 认证,通用,2 类电源 CCC 认证 : 通过中国强制性产品认证 (CCC) E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 3 针 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 质量 : 46 g
潍坊接近开关Velodyne这种方案有两个很明显的优点:一是元器件都是很成熟的工业化产品,这样就能很容易将产品批量做出来推向市场;二是要提升扫描点云密度时,仅需要提升单台雷达的激光收发器数量(或者等效的线数)。(到这里我们要说说点云密度问题了。在前两篇文章中我曾经反复提到“分辨率”,传感器分辨率越高漏报的概率就越低,对目标物的描绘就越精细。具体到激光雷达上,点云密度越大意味着扫描分辨率越高。)在产品开发过程中,工程师们要想做出一个能批量化生产的产品并且保证产品的良品率,首先要考虑的就是能够批量采购到标准化程度足够高的元器件。而机械旋转式方案最大的优势就在于他的核心器件全都是标准化产品,可选择的参数型号也比较多。
样本接近开关为了防止高压传感器失效,一般控制器内部会布置两个高压传感器,压缩机控制器会定时比较两个高压传感器差值,当差值超过设定值时,压缩机停机工作。当控制器检测到高压母线电压波动较大,比如在一个采样周期内检测到两次电压值差值超过设定值时,压缩机会降功率运行,当电压波动恢复到限定值以内,压缩机恢复目标转速。
P+F接近开关那么这个要求对于传感器翻译成传感器的技术体系要求变成了200米外要识别出来一个车是在本车道,或者是在邻车道。那么4G成像雷达只是一度的水平分辨能力以及300米的目标检测,实际上200米外的两辆车,它即便是同速同距的,属于相邻车道,也可以完全用角度的方式去分辨出来。
潍坊接近开关开发一个每 100 英里就失效一次然后需要人类干预的 2 级( http://cyberlaw.stanford.edu/files/blogimages/LevelsofDrivingAutomation.png )自动驾驶系统, 要远比开发一个每 100 万英里才失效一次的 4 级或 5 级自动驾驶系统容易得多。即使特斯拉离全自动驾驶的目标还很远,但几乎可以肯定的是,特斯拉将会开发出能够在城市街道上行驶的 2 级自动驾驶系统。在对未来的展望中,挥之不去的主要问题是,随着机器错误发生得越来越少,司机是会仍然保持警惕并在必要时干预自动驾驶机器呢,还是会被引入一种错误的安全感呢。特斯拉可能需要实施司机监控系统,确保司机随时集中注意力。朝向司机安放的照相机和已有的方向盘扭矩传感器,这两者的组合可能会比单独使用扭矩传感器更加有效。
样本接近开关那么4D毫米波雷达通过大幅的提升水平和垂直检测能力,是有机会率先满足全目标、全覆盖、多工况的一个感知要求,逐步接近理想传感器的要求。那么这样的话它可以和摄像头和激光雷达一起形成一个有效的融合,打造一个满足自动驾驶要求的感知铁三角。
特斯拉是想打造一种实现自动化目标的方法,这种方法能够适应不断扩增的数据规模,因为特斯拉拥有全球最大规模的车辆网络来收集数据,这些车辆上配置了传感器和计算机,并且都连入了互联网。这种方法最大的瓶颈就在于支付给标注工人的薪水。在计算机视觉任务中,特斯拉需要不断地把新产生的、手动打标过的照相机数据添加到训练集里,这样才能不断增加算法能力,但这种方式难以适应不断扩增的可收集数据规模,而只能应付这些数据的一个子集,这个子集规模对应于特斯拉能够承受的打标成本。特斯拉也许可以收集 1 万亿张交通灯照片,但是却支付不起同样规模的打标(指将照片中的交通灯标注为红、绿或黄三种颜色)费用。
第二是安全,无论自动驾驶还是辅助驾驶,安全都是首要因素,它对传感器的要求对突出的诉求是禁止障碍物的检测,这是传统毫米波的短板。4D成像雷达点云增加10倍,是大幅提升了静止目标的检测执行度的,小障碍物的检测有非常好的表现,比如说110米以外的锥筒,我们是可以有效的分辨。
此次交易不构成关联交易及重大资产重组。根据评估,截至2019年3月31日,惠昌传感器股东全部权益的评估结果为1.84亿元,较经审计后所有者权益9193.55万元,增值率100.14%。本次交易双方协商确定惠昌传感器股东全部权益基准估值为1.824亿元,因此目标股权的基准交易对价为1.64亿元。收购完成后,惠昌传感器成为公司控股子公司。
在我们做第一代雷达的同时,实际上我们也在考虑自动驾驶或者体验意义上的自动驾驶如何走向量产,它对传感器带来全新的要求。辅助驾驶可能更多关注人和车的进展,但是对于自动驾驶要求的更全面的目标检测以及更高的执行度,比如准确检测到100米外的障碍物,同时它对覆盖率有很高的提升。举个例子,它可以刚刚看到300米外的车,也可以看到横向的±60度的检测范围,这样的话传感器要求是大幅提升的,我们总结下来自动驾驶的对传感器的要求变成4个全:全目标、全覆盖、全工况和全天候,基本上就是一个非常理想的创新的目标。