P+F接近开关为了解决上述的问题,研究者开发了一种由生物启发的视觉传感器,其是基于MoS2的光电晶体管,具有时变的激活和抑制特性。电荷陷阱态被有意地引入二硫化钼的表面,使得在不同的光照条件下,可以动态调制器件的光敏性。

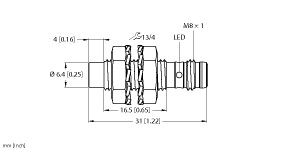
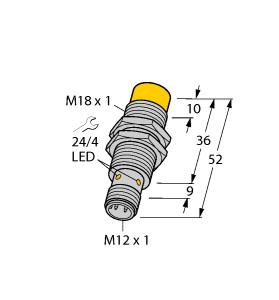
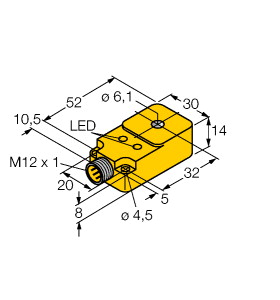
(P+F 电感式传感器 NBN12-18GM50-E0-M)
12 mm,非齐平,温度范围扩大
-40 ... +85 °C,E1 型式批准,抗扰度提高至 100 V/m,密封性增强,防护等级
IP68 / IP69K,出色的耐冲击和防振性能
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,4 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 5 ... 60 V 开关频率 : 0 ... 1500 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 感应过电压保护 : 是 浪涌抑制 : 是 电压降 : ≤ 2 V 额定绝缘电压 : 60 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 0,1 µA 在 25 °C 时 空载电流 : ≤ 7 mA 可用前的时间延迟 : ≤ 220 ms 开关状态指示灯 : 黄色 LED MTTFd : 1085,5 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证,一般用途,2 类电源 CSA 认证 : 通过 cCSAus 认证,通用,2 类电源 CCC 认证 : 通过中国强制性产品认证 (CCC) E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 PUR , 2 m 线芯横截面积 : 3 x 0.75 mm2 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 质量 : 132 g
日照接近开关来自美国的iRobot Roomba 961扫地机器人同样采用视觉导航技术,但它的杀手锏是搭载了多重传感系统:Wheel Odometry轮胎里程计(有两个传感器内置于轮胎内,检测轮胎行进了多少距离),Optical Float Sensor光学移动传感器(凭借光学流动信号反馈系统,在不同介质的地面上估算扫地机器人移动了多少距离),以及vSLAM™视觉运算处理技术,还有其它防撞、悬崖、沿边传感器等。得益于此系统,Roomba 961扫地机器人即使在光线条件不佳,或者某一个传感系统不适用时,仍能够进行正常工作。9.19号0点直降200元,3799元开抢!
样本接近开关在动态系统故障诊断与容错控制方面,故障检测是故障诊断的前提和基础,近年来主要针对嵌入式检测和非接触式检测(无损检测)两种方法进行研究,取得了一定进展。针对动态系统的故障诊断和容错控制问题,参考文献[106]设计了满足有限频域H ∞性能指标的滤波器,使得在高频扰动下故障估计误差尽可能小。参考文献[107]设计了自适应分布式故障检测观测器,实现对有向通信拓扑结构的多智能体系统的故障估计。近年来,主动故障分离技术受到了更多关注,这种方法通过修改控制输入提高故障分离能力。参考文献[108]考虑了输入信号的设计,采用多参数规划,最大限度地减少分离系统故障所需的时间和能量。由于机理的复杂性,工程上许多时候难以获得系统的理论模型,因此需要基于系统运行数据来辨识系统模型和故障状态。参考文献[109]提出了滚动时域 故障估计法,在不补偿辨识误差的条件下,通过辨识状态空间模型或马尔科夫参数构建故障估计器。参考文献[110]提出了对正常变量无污染效应的改进贡献图方法,可分离多重传感器故障。参考文献[111]利用历史故障信息构建数据模型,提取了代表不同故障特征的独立成分和非线性故障方向信息,实现了非线性过程的故障分离。针对网络控制系统的故障诊断与容错控制问题,参考文献[112]通过矩阵分解,将时延的影响等效为未知有界不确定项,设计状态观测器,实现短时延的故障诊断。通过将长时延转化为确定常数,并在执行器和控制器接收端中加入一定缓存,可实现长时延的故障诊断。参考文献[113]考虑多通信延迟与数据丢失问题,分别构建最小二乘滤波器和卡尔曼滤波器, 实现故障诊断。在实际网络控制系统中,数据包丢失将引起故障特征信息缺失,使故障诊断问题更为复杂。参考文献[114]基于数据驱动,应用期望 - 最大化算法处理缺失数据。参考文献[115]针对存在参数摄动和未知输入的非线性网络系统进行研究,解决了递归 网络强跟踪滤波器的设计问题。
P+F接近开关“这套系统能让数据动起来,真实生动地反映结构状态的变化。” 他说,有了这套关键技术,仅需少量传感器,就可采用智能方法,对日常运营条件下大跨桥梁结构整体工作状态进行自动监测与预警。他们将成果应用于单跨世界第一的苏通大桥和单跨世界第三的润扬大桥,成功地实现了运营条件下桥梁结构的实时状态监测。
日照接近开关基于传感科技和产业重要的战略意义以及我国传感器产业发展的迫切需求,我国仪器仪表与测量控制领域的最高学术组织——中国仪器仪表学会提出举办“2018首届世界传感器大会(英文名称:World Sensors Summit,英文简称:WSS)”的工作计划,并纳入到“智能传感器创新联盟”2018年活动计划之中。大会计划提出后,得到了河南省人民政府以及郑州市人民政府的积极响应,并为首届大会落地郑州提供了诸多有利条件。
样本接近开关2021 Lexus IS配备了该公司最新的高级安全和驾驶员辅助技术套件。它被称为雷克萨斯安全系统+ 2.5,包括自动紧急制动功能,该传感器具有改进的传感器,可以在更宽的距离和照明条件下检测车辆,自行车和行人。
数据丢失的问题困扰着实验科学的所有领域。回答者不会在调查问卷上填写所有的条目,传感器无法捕捉环境中的所有变化,以及病人经常不知为何从临床研究中突然退出。对于这个问题,大量的文献致力于统计分析的黑箱模型范式。使用缺失过程的因果模型,我们可以形式化从不完整数据中恢复因果和概率的关系的条件,并且只要条件被满足,就可以生成对所需关系的一致性估计(Mohan and Pearl, 2017)。
智能网联汽车是指搭载了先进传感器等装备、运用人工智能等新技术、具有自动驾驶功能、逐步成为智能移动空间和应用终端的新一代汽车。国家发展改革委2020年发布的《智能汽车创新发展战略》确定的目标是,到2025年部分自动驾驶、有条件自动驾驶新车销量占比50%以上,高度自动驾驶车辆开始进入市场,网联协同感知在高速公路、城市道路节点和封闭园区实现成熟应用,在限定区域内实现高度自动驾驶汽车的商业化应用。
上海欣软提供的听觉惊跳反射系统(也叫震惊条件反射系统)通过重力传感器探测实验动物的全身抖动反应。随着声音刺激的产生和增强,动物主要肌群出现收缩和舒张。抗焦虑的药物使这种反应减弱、幅度降低,致焦虑剂则相反。惊跳反射前抑制(prepulse inhibition, PPI)是最常用的应用之一。
这种方法可以在实验室条件下估算软铁效应,当然,使用过程中的变化和附加设备的影响无法得到补偿。尽管如此,这依然是一种非常有效的设备内部件校准技术,强烈建议于设计阶段在传感器制造商专家的帮助下准确生成SIC矩阵并加以应用。