P+F接近开关 欲使变频系统中的某一个物理量稳定在预期的目标值上,变频器的PID功能电路将反馈信号与目标信号不断地进行比较,并根据比较结果来实时地调整输出频率和电动机的转速。所以,变频器的PID控制至少需要两种控制信号:目标信号和反馈信号。这里所说的目标信号是某物理量预期稳定值所对应的电信号,亦称目标值或给定值;而该物理量通过传感器测量到的实际值对应的电信号称为反馈信号,亦称反馈量或当前值。

(P+F 电感式传感器 NBN12-18GM50-E0)
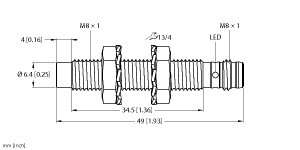
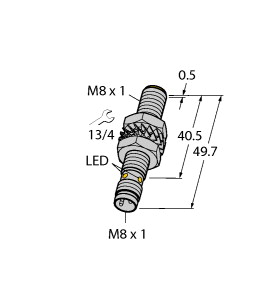
12 mm,非齐平,更远的工作距离,温度范围扩大
-40 ... +85 °C,工作电压范围扩大,具有多种安装选择,使用灵活
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 驱动器件 : 软钢,如 1.0037、SR235JR(之前为 St37-2)
36 mm x 36 mm x 1 mm 衰减系数 rAl : 0,49 衰减系数 rCu : 0,46 衰减系数 r304 : 0,75 衰减系数 rBrass : 0,55 输出类型 : 3 线 工作电压 : 5 ... 36 V 开关频率 : 0 ... 1300 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 电压降 : ≤ 1 V 工作电流 : 0 ... 200 mA 断态电流 : 最大 20 µA 空载电流 : ≤ 10 mA 可用前的时间延迟 : ≤ 10 ms 开关状态指示灯 : 黄色 LED MTTFd : 1708 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % PWIS 符合性 : VDMA 24364-C1/T100°C-W 符合标准 : EAC 符合性 : TR CU 020/2011 防护等级 : II UL 认证 : cULus 认证,一般用途,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 外壳材料 : 黄铜 , 白青铜 带涂层 感应面 : PBT , 绿色 防护等级 : IP68 电缆 : 质量 : 110 g 拧紧扭矩 : 0 ... 30 Nm 供货范围 : 供货范围包含 2 颗自锁螺母
烟台接近开关在进行装配、抓放物体等工作时,除了要求准确定位之外,还要求所使用的力或力矩必须合适,这时必须要使用(力矩)伺服方式。这种控制方式的原理与位置伺服控制原理基本相同,只不过输入量和反馈量不是位置信号,而是力(力矩)信号,所以该系统中必须有力(力矩)传感器。有时也利用接近、滑动等传感功能进行自适应式控制。
报价接近开关在完成装配、抓放物体等工作时,除要准确定位外,还要求使用适度的力或力矩进行工作,这时就要利用力(力矩)伺服方式。这种方式的控制原理与位置伺服控制原理基本相同,只不过输入量和反馈量不是位置信号,而是力(力矩)信号,因此系统中必须有力(力矩)传感器。有时也利用接近、滑动等传感功能进行自适应式控制。
P+F接近开关海洋起重机升沉补偿系统原理与分类根据驱动原理,升沉补偿系统分为被动式升沉补偿系统和主动式升沉补偿系统。被动式升沉补偿系统主要由随动装置和执行器组成。系统工作时,被补给船的运动信号会通过测量装置传递到随动装置,驱动随动装置向相反的方向运动,已达到补偿。这类补偿方式精度低,性能不稳定,滞后比较大,效率低。主动式升沉补偿系统主要由检测系统、控制系统、电液伺服驱动系统和机械执行系统等四部分。检测系统主要检测船的运动姿态,包括船的直接升沉运动和船横倾、纵倾引起的间接升沉运动,为了保证系统的可靠性及安全性,此类信号采用国外最新的运动参考单元(MRU)来实现高精度的检测。船舶姿态运动信号是补偿信号的来源,因此提高船舶运动检测精度和检测系统实时性,是主动式升沉补偿控制系统的关键。在这里我要跟大家普及一下MRU的概念。MRU(Motion Reference Units)--运动参考单元,内部集成高精度3轴陀螺仪、加速度计、磁力计和气压计,融合自身算法,可以提供精确的航向、俯仰横滚、升沉、摇摆、浪涌、速度、位置和原始数据等信息。美国Inertial Labs的MRU系列产品具有高精度、高稳定性、体积小、性价比高的特点,深受客户信赖。北斗星通作为Inertial Labs中国地区的唯一合作伙伴,可为客户提供专业的解决方案。控制系统主要作用是根据传感器监测到的船舶姿态运动量、系统给定的吊装输入量和系统反馈量,通过一定的控制算法计算出一个与之等大反向的指令,并传递给电液伺服系统,该系统是一个闭环的控制系统,包括一些控制算法等。电液伺服驱动系统分为主驱动电液伺服系统和副驱动电液伺服系统,主驱动电液伺服系统和普通的船用起重机的功能是相同的,输入主控信号,主要完成货物的吊装作业。副驱动电液伺服系统主要输入补偿信号,补偿船舶升沉运动。机械执行系统是实现货物补给的最终执行装置。补偿原理如前面所述,船在海上运动时,由于海浪的影响,会产生6个方向的自由度运动,3个轴的往复和旋转运动。船在6个自由度方向上的运动相互耦合,共同使船在垂直方向上产生升沉运动。其中对船货物吊装升沉补偿影响最大的是船的升沉运动和横倾、纵倾运动,其他的可以忽略。速度补偿的原理就是补偿系统产生一个与船相对运动姿态大小相等反向的速度,来抵消船的相对运动速度。如图所示:国内外研究现状海上起重机是海洋工程建设必不可少的工程船舶装备。为了保障能够在海上复杂条件下实施有效的作业,不受海洋环境(如波浪)的影响,保障作业的安全稳定,很多国家在90年代就已经进行海洋起重机升沉补偿系统的研究,但是由于升沉补偿技术相对于其他海洋装备技术难度大,目前只有少数几个国家如荷兰、美国、德国、日本等一些企业可以生产升沉补偿器,且处于国际领先地位。比如美国NOV公司(世界上最大的升沉系统制造商)、Varco、Macgregor、Dynacon、德国利勃海尔、力士乐、荷兰Huisman、IHC、英国Brown Brother公司、挪威TTS、Hydralift、意大利Saipem、日本IHI、瑞典赫格隆、法国BLM、芬兰麦基嘉等公司。
烟台接近开关导航控制器采用PID控制算法,设定值为目标角度,反馈量为当前航向角ψ;当系统直线行驶或者与目标角度的偏差较小时,系统进入直行导航阶段。为了防止系统调节时出现振荡现象,当地磁传感器所得到航向角与目标角度的偏差在±2°以内时,系统不进行调整,运动方向不发生改变。当偏差达到±3°时,系统采用PID控制方法调整智能车方向。
报价接近开关3.4 系统组成综合以上所叙述的,选择STM32F103C8T6单片机作为主控芯片,MPU-6050姿态传感器,直流有刷减速电机,大功率H全桥电机驱动器组成双轮载人平衡车硬件系统。辅以卡尔曼滤波算法对陀螺仪和加速度计数据进行融合,计算出车身倾角与角速度的最优估计值。并以最优姿态角和车身速度作为反馈量构成双闭环控制反馈回主控制系统中产生两路动态可调的PWM波驱动电机前后转动以维持车身的平衡与直立。系统框图如图3.4所示。
目标信号与反馈信号欲使变频系统中的某一个物理量稳定在预期的目标值上,变频器的PID功能电路将反馈信号与目标信号不断地进行比较,并根据比较结果来实时地调整输出频率和电动机的转速。所以,变频器的PID控制至少需要两种控制信号:目标信号和反馈信号。这里所说的目标信号是某物理量预期稳定值所对应的电信号,亦称目标值或给定值;而该物理量通过传感器测量到的实际值对应的电信号称为反馈信号,亦称反馈量或当前值。PID控制的功能示意图见图2,图中有一个PID开关,可通过变频器的功能参数设置使PID功能有效或无效,PID功能有效时开关合向下方,由PID电路决定运行频率;PID功能无效时开关合向上方,由频率设定信号决定运行频率。PID开关、动作选择开关和反馈信号切换开关均由功能参数的设置决定其工作状态。
实现开环运行之后,就要进行闭环控制了,首先有一点需要说明的是,前面的六步PWM时序,并没有根据转子的实际位置进行磁场的切换,所以可能出现的情况,就是失步,这个有点类似步进电机。结果就是实际磁场旋转的速度可能远快于转子旋转的速度,导致磁场的旋转速度和转子不同步,所以就造成了失步。如果这里引入转子的位置反馈量,就可以完美的解决这个问题,所以通常会加入霍尔传感器来检测实际的转子位置。
下图所示的系统中,压力变送器将泵站出口管道的水压转换为标准量程的电压或电流,这些反馈量直接送给变频器的模拟量输入端,这种方案的控制与和变频器是一体化的,具有硬件成本低、使用方便、工程编程量少的优点,应优先采用,可以安装在水泵出水口管道上的压力传感器,将0-1MPa的压力转换为4一 20mA的直流电流,用于水压的闭环控制。
设置变频器时,只要知道PID需要反馈量和给定量即可。反馈量即是压力的实时信号(在管道上的远传压力表---电阻式,或者是三线或两线的压力传感器。给定量即要求达到我压力值(可以在变频器的键盘上设或者用外置电位器)。