P+F接近开关G-NSDOG2-002倾角传感器是一种姿态传感器,主要用于物体状态的水平检测,同时还具有测量角度大小的能力。 基本上有两种类型的 G-NSDOG2-002 倾角传感器。 一类可称为静态倾角传感器,其基本原理是牛顿第二定律,这类传感器多用于静态或准静态物体的监测,已成为大坝、桥梁、建筑物、 高空作业平台车辆。 角度检测等行业不可缺少的测量工具。

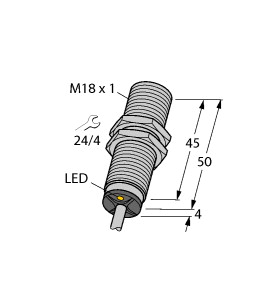
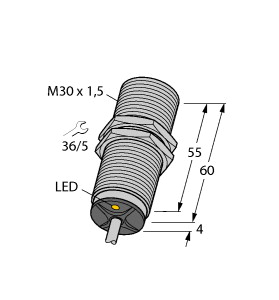
(P+F 电感式传感器 NBN12-18GM50-E0-M1)
12 mm,非齐平,更远的工作距离,温度范围扩大
-40 ... +85 °C,密封性增强,防护等级
IP68 / IP69K,E1 型式批准
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 驱动器件 : 软钢,如 1.0037、SR235JR(之前为 St37-2)
36 mm x 36 mm x 1 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,45 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 7 ... 30 V 开关频率 : 0 ... 1200 Hz 迟滞 : 典型值为 5% 反极性保护 : 反极性保护 短路保护 : 脉冲式 电压降 : ≤ 2 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 4 µA 在 25 °C 时 空载电流 : ≤ 10 mA 可用前的时间延迟 : ≤ 100 ms 开关状态指示灯 : 黄色 LED MTTFd : 1484 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : UL 认证 : cULus 认证,一般用途,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 PUR , 2 m 线芯横截面积 : 0,34 mm2 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 质量 : 90 g 供货范围 : 供货范围包含 2 颗自锁螺母
济宁接近开关光电液位开关比浮球式液位传感器谁更适合应用在食品分析仪上随着现代科学技术的迅速发展,我们已经走出了以前茹毛饮血的时代,来到了科技发达的年代。科技的发展给我们的生活带来了极大的方便。以前的很多人工作业,效率低,成本高,产量也提不上去,科技的发展,现在产品生产都是机械化操作,例如:如家中的热水器代替了人工烧水;洗衣机代替了人工手洗;而其中液位传感器代替了人工监测水位等等。这些免去了大量的人力物力也大大提高了生产的效率。下面工采网小编就给大家简单介绍一下光电液位开关比浮球式液位传感器谁更适合应用在食品分析仪上。
清仓接近开关ThinkPad 最具识别度的元素当属键盘正中间的“小红帽”- TrackPoint 。我细细感受这台 ThinkPad L470 的指点杆,它应该是通过检测支撑杆的压力变化作业,通过倾斜传感器来检测上下左右的受力情况,确定鼠标移动速度和方向。通俗来讲,就是把一个游戏机的摇杆放置在笔记本中,让使用者通过一根手指操作摇杆,达到控制光标的目的。
P+F接近开关另外智能物流方面,智能物流方面目前来讲,立体仓库已经有比较成熟的解决方案,但即使像京东亚洲一号这样的物流基地,两万平米的物流基地,仍然雇佣五百个多人,做什么工作呢?其实也是简单的工作,但是目前自动化智能化做的还是比较少,就是把货箱从辊道搬到货盘上,或者把货箱上的货物搬运到辊道上,他的货箱大小不一样,同时可能形状不一样,需要用比较精确的双目识别或者物体识别的方式,用机械臂进行搬运,同时机器人需要移动,不能是在一个地方工作,要不然这一条配送中心下来,每条配送线都配一个机械臂,是固定方式的机械臂,如果作业机器人价格是十万,那也是很大的投资。同时机械臂固定在一个地方能耗和效率会降低,对于机械臂可以做成可移动式,这也是咱们国家科技部人工智能智能机器人方面的国家项目,叫做“可移动式智能作业机器人”。智能机器人不像传统的工业机器人要在一个封闭圈里工作,需要跟人进行协作,需要安全性非常高,不仅仅是采用一些电流传感器或者是扭矩传感器去解决,这种传感器来检测到碰撞的时候,实际上碰撞已经发生了,需要更好的一种方式,类似无人驾驶的方式,无人驾驶车预测到可能发生碰撞,如果预测到发生碰撞,就会启动安全机制,防碰撞机制。
济宁接近开关2►以多级别安全配置,实现真正人机协作安全性是人机协同作业的基础。在安全性方面,珞石xMate CR系列每个关节内置力矩传感器,可实现比基于电流环的协作机器人碰撞检测灵敏度超5倍的提升。机器人采用先进的吸合式抱闸设计,配置独立认证的安全控制器,具备双通道冗余监控能力,并且整机已通过22项TüV功能安全认证,以多级别的安全配置为人机协作提供可靠安全保障。
清仓接近开关徐州博泰研发的采煤机智能降尘系统主要由采煤机红外发射器,采煤机红外接收器、压力传感器、矿用本安型分控箱、喷雾水幕、液体自动添加装置等主要设备组成。随采煤机联动定点喷雾降尘功能。在采煤机割煤移动过程中,装在机身上的发射器可根据移动方向和位置,向分控箱发射信号。接收到信号的控制箱根据这些信号,开启或关闭支架上相应的喷雾,在采煤机的下风端形成可随采煤机移动的水幕。喷洒时间根据现场情况自定义设定,能够对采煤机作业产生的大量粉尘进行有效的阻隔和沉降,实现采煤机、架间喷雾的联动运行。在采煤机降尘喷雾水中通过ZJT-30/4型煤矿用液体添加装置加入斯瑞弗抑尘剂,降低水分子的表面张力、提高粉尘润湿效果、增加捕尘效率,提高喷雾综合降尘率。
徐州博泰研发的采煤机智能降尘装置主要由采煤机红外发射器,采煤机红外接收器、压力传感器、矿用本安型分控箱、喷雾水幕、液体自动添加装置等主要设备组成。在采煤机割煤移动过程中,装在机身上的发射器可根据移动方向和位置,向分控箱发射信号。接收到信号的控制箱根据这些信号,开启或关闭支架上相应的喷雾,在采煤机的下风端形成可随采煤机移动的水幕。喷洒时间根据现场情况自定义设定,能够对采煤机作业产生的大量粉尘进行有效的阻隔和沉降,实现采煤机、架间喷雾的联动运行。在采煤机降尘喷雾水中通过ZJT-30/4型煤矿用液体添加装置加入斯瑞弗抑尘剂,降低水分子的表面张力、提高粉尘润湿效果、增加捕尘效率,提高喷雾综合降尘率。
与公路导航相比,农田导航目标的识别更复杂,但是农田导航不需要特别关注周围环境,所以农用视觉导航系统更容易推广使用。国内外很多研究者将视觉导航系统和控制系统、机械装置结合,设计了自动驾驶系统。自动驾驶的农用车辆装配农田作业机械进行农药的喷洒、农作物收获等大规模作业,可以大幅度提高效率、节约劳动力。Hanawa等开发了农用拖拉机的立体视觉导航系统,对两个相机采集的图像进行处理,可以检测农作物行、人为标记、非耕作区域。将检测到的作物位置数据传送到拖拉机转向控制器,可以完成拖拉机的自动耕作。English等对农田的平行和侧向偏移结构,比如作物行或者犁沟线,结合颜色、间距、结构性进行分析,利用C++和OpenCV实现从拍摄的俯视图中提取导航线。采用多用途车搭载视觉导航系统和GPS系统,完成了自动导航。陈兵旗等研究了农用拖拉机田间视觉导航系统。利用结合传感器与机器视觉技术进行信号的采集与处理,通过机械装置控制方向盘转动,可以实现拖拉机的无人驾驶。原型样机如图10所示,(a)为机器视觉导航系统组成,包括摄像头、计算机处理系统、转向控制系统等;(b)为转向控制系统,通过对方向盘的转向控制,实现模拟人工驾驶。通过性能测试,其导航精度远高于精密GNSS(全球卫星导航系统)的定位精度。
食品分析仪是用于食品营养成分、风味、污染检测的仪器,食品生产中主要测量和控制参数是温度、压力或真空度、液位或料面、物料成分、 湿含量、产品计数。在食品生产连续化作业线上,为了检测食品包装容器中的食物重量或容重是否在允差范围,常常在生产线上设置重量或液位检测装置,对于不合格产品则通过选别机或其他执行机构随时将其从生产线中剔除。对于检测装有饮料等的包装容器可借用X射线来判断罐内液面的水平检测仪。为更好的检测灌装体的液位经常采用的是液位传感器。
徐州博泰研发的采煤机智能降尘系统主要由采煤机红外发射器,采煤机红外接收器、压力传感器、矿用本安型分控箱、喷雾水幕、液体自动添加装置等主要设备组成。随采煤机联动定点喷雾降尘功能。在采煤机割煤移动过程中,装在机身上的发射器可根据移动方向和位置,向分控箱发射信号。接收到信号的控制箱根据这些信号,开启或关闭支架上相应的喷雾,在采煤机的下风端形成可随采煤机移动的水幕。喷洒时间根据现场情况自定义设定,能够对采煤机作业产生的大量粉尘进行有效的阻隔和沉降,实现采煤机、架间喷雾的联动运行。在采煤机降尘喷雾水中通过ZJT-30/4型煤矿用液体添加装置加入斯瑞弗抑尘剂,降低水分子的表面张力、提高粉尘润湿效果、增加捕尘效率,提高喷雾综合降尘率。