P+F接近开关为了量化该方法的准确性,我们通过收集200多个参与者的前置同步视频和深度图像,将其与iPhone 11上的深度传感器进行了比较。我们使用激光测距设备通过实验验证了iPhone 11深度传感器的误差在2米以内的误差小于2%。我们的评估表明,我们使用虹膜尺寸进行深度估计的方法的平均相对误差为4.3%,标准偏差为2.4%。我们对有或没有眼镜的参与者(不计入参与者的隐形眼镜)测试了我们的方法,发现眼镜将平均相对误差略微提高到4.8%(标准偏差为3.1%)。我们没有测试参与者这种做法与任何眼部疾病(如老年环或血管翳)。考虑到MediaPipe Iris不需要专门的硬件,这些结果表明,可以在成本范围很广的设备上从单个图像获取度量深度。

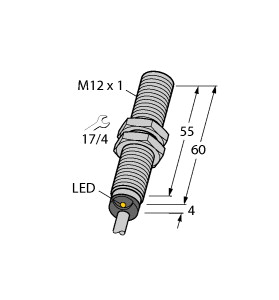
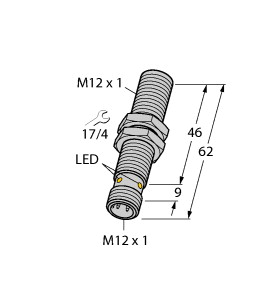
(P+F 电感式传感器 NBN12-18GM50-E0-3M)
12 mm,非齐平,更远的工作距离,温度范围扩大
-40 ... +85 °C,工作电压范围扩大,具有多种安装选择,使用灵活
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 驱动器件 : 软钢,如 1.0037、SR235JR(之前为 St37-2)
36 mm x 36 mm x 1 mm 衰减系数 rAl : 0,49 衰减系数 rCu : 0,46 衰减系数 r304 : 0,75 衰减系数 rBrass : 0,55 输出类型 : 3 线 工作电压 : 5 ... 36 V 开关频率 : 0 ... 1300 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 电压降 : ≤ 1 V 工作电流 : 0 ... 200 mA 断态电流 : 最大 20 µA 空载电流 : ≤ 10 mA 可用前的时间延迟 : ≤ 10 ms 开关状态指示灯 : 黄色 LED MTTFd : 1708 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % PWIS 符合性 : VDMA 24364-C1/T100°C-W 符合标准 : EAC 符合性 : TR CU 020/2011 防护等级 : II UL 认证 : cULus 认证,一般用途,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 外壳材料 : 黄铜 , 白青铜 带涂层 感应面 : PBT , 绿色 防护等级 : IP68 电缆 : 质量 : 137 g 拧紧扭矩 : 0 ... 30 Nm 供货范围 : 供货范围包含 2 颗自锁螺母
潍坊接近开关特斯拉为实现L2-L3等级的无人驾驶概念,运用由超声波传感器、摄像头、毫米波雷达和车载传感器的组成来探测障碍物距离。也就是说,L2-L3主流方案,并不是使用激光雷达。其中车载超神波雷达成本较低,有效探测距离小于5米,无法对远距离物体进行测量;毫米波雷达有同时测距测速功能,有效探测距离达200米,但单颗车载毫米波雷达的角度分辨能力较弱,无法辨识物体细节,在混杂的路面情况和强光照情况下的探测效果不佳;另外摄像头对于物体以及距离的识别高度依赖深度学习算法,距离测算无法做到完全精确。
订货接近开关LIDAR传感器LIDAR(光探测及测距)传感器能发射不可见的激光光速,对周围环境进行扫描,可探测障碍物、测量距离并生成3D图像,LIDAR传感器结合摄像头的数据能精确识别障碍物,判断前方是人还是其他的动物等等。
P+F接近开关根据外媒 DigitalTrends 的报道,松下公司推出的这款可移动冰箱可以识别用户发出的语音命令,并作出反应。这款产品的内部配置有光线传感器、激光雷达测距仪以及深度传感器,可以对房间的内部构造进行扫描,并通过内置导航系统实现无障碍移动。
潍坊接近开关随着汽车市场ADAS(高级驾驶辅助系统)的发展,汽车传感器融合的需求正在增长,通过结合来自多个传感器的数据,如摄像头、雷达和LiDAR(光探测和测距),可以精确地检测车辆周围的物体。特别是雷达,它能在长距离、白天或夜晚,甚至在恶劣的天气或其他不利的环境条件下准确地探测物体。由于这些原因,雷达被认为是ADAS的一项基本传感技术,预计未来五年安装在车辆上的雷达传感器数量将增加两倍,瑞萨说。
订货接近开关英国沃里克大学的学生曾研制出一款用于地震搜救的机器人。采用Kinect作为主传感器的这款机器人在图像感知方面几乎无所不能,之所以不采用激光雷达的原因在于其不仅造价昂贵,而且效率不高,只能显示二维平面图像。相比之下,Kinect的测距仪能够传输3D地图,这对营救人员搜寻被困人员意义重大。
机载电子设备主要由激光测距仪与Oghab-6光电红外传感器组成,该机每侧翼下设置有一组挂点,可通过并联方式最多携带4精确制导弹药。主要包括全重34千克、最大滑翔距离为6千米的“赛迪德”345型电视制导炸弹及全重25千克以下,最大滑翔距离为4千米的“赛迪德”1型电视制导炸弹。但伊朗军方宣称该机载荷远不止如此,称其最多可搭载8枚制导炸弹,但碍于没有实物或是照片予以佐证,因此有待观察。
而帝豪GS的传感器来自于德国博世77GHz毫米波雷达,最远探测距离可达160m。可以在车速30km/h~150km/h区间能进行主动巡航,并在碰撞发生前进行预警,甚至在关键时刻刹停车辆,能够有效避免车辆追尾等事故的发生。
车载摄像头以图像识别算法为基础,主要负责外部图像环境感知与分析,在自动驾驶 传感器领域有着至关重要的作用,是自动驾驶“的汽车之眼”;毫米波雷达运用 24-300GHz 的毫米波进行环境感知,可在恶劣天气或光线较暗条件下稳定工作,同时可以有效测量障 碍物距离与方位,在自动驾驶领域应用广阔;激光雷达基于 TOF(Time of Fly)技术,利 用激光束测量距离并形成激光点云,是三维成像及绘制高精度地图最理想的手段之一,但 由于成本较高,目前尚未在汽车端普及。从性能来看,三类传感器的探测距离、分辨率、 角分辨率等探测参数各异,对应于物体探测能力、识别分类能力、三维建模、抗恶劣天气 等特性优劣势分明。
在济南、贵阳等地,无人驾驶公交车已进行了公开测试。它身上“长”满传感器。为识别交通信号灯,车头上方设计了两个黑色的信号接收器,可实现360度全覆盖,无盲区。其他传感器有检测距离的,有雨雾天专用的、有夜晚专用的等。