P+F感应开关本届大会会期三天,由传感器大会、传感器产业科技成果展、传感器创新大赛(一会一展一赛)三大板块组成。其中,大会包含1个主报告会和10个专题会议,邀请60余位院士、专家、产业界代表从不同角度,对智能传感器发展进行主题演讲。成果展展示区面积近万平方米,来自全球10个国家170家企业展示新产品新技术。大会期间还将进行“中国(国际)传感器创新创业大赛”决赛评选。

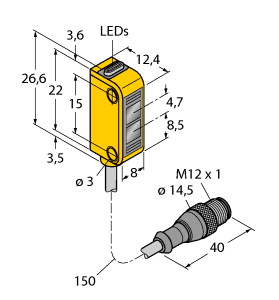
(P+F 漫反射型光电传感器 ML100-8-1000-RT/102/115)
微型设计,易于使用,光斑极为明亮、清晰,全金属螺纹安装,清晰可见的 LED,用于指示通电和开关状态,对环境光不敏感
检测距离 : 0 ... 1000 mm 调整范围 : 100 ... 1000 mm 参考目标 : 标准白色平板,100 mm x 100 mm 光源 : LED 光源类型 : 调制可见红光 偏振滤波片 : 无 光点直径 : 大约 75 mm 相距 1000 mm 发散角 : 大约 2 ° 光学端面 : 向前直射 环境光限制 : EN 60947-5-2:2007+A1:2012 MTTFd : 860 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:通电 功能指示灯 : 黄色 LED,当接收器接收到光时亮起 控制元件 : 灵敏度调节 控制元件 : 亮时接通/暗时接通转换开关 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : < 20 mA 开关类型 : 该传感器的开关类型是可更改的。默认设置为: 亮时接通 信号输出 : 1 路 NPN 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 电压降 : ≤ 1,5 V DC 开关频率 : 1000 Hz 响应时间 : 0,5 ms 产品标准 : EN 60947-5-2 EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证的 2 类电源,或具有有限电压输出且带(可以是集成式)保险丝(最大值为 3.3 A,符合 UL248 标准)的认证电源,1 类外壳 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -30 ... 60 °C (-22 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 11 mm 外壳高度 : 31 mm 外壳深度 : 20 mm 防护等级 : IP67 连接 : 2 m 固定电缆 材料 : 质量 : 大约 50 g 紧固螺丝的紧固扭矩 : 0,6 Nm 电缆长度 : 2 m
济南感应开关系统工作原理如下:摆杆摆动时,角度传感器检测摆杆的角度,根据角度传感器的输出特性,其输出电压经A/D转换器转换成电压数字量,该数字量与期望的值进行比较产生偏差,通过单片机对该偏差进行处理,即PID控制运算,根据运算结果产生控制信号控制电机和旋臂的转动,使摆杆的角度与期望的角度更接近。
报价感应开关图1为一阶旋转倒立摆结构示意图。直流电机作为唯一的动力装置,与旋臂保持刚性连接,带动旋臂在水平面内旋转,旋臂的一端通过转轴(本系统选用电位器角度传感器)与摆杆连接,摆杆可做垂直于旋臂的圆周运动。在自然状态下,摆杆为竖直下垂状态。倒立摆控制的目的是通过控制直流电动机的运动状态,使摆杆保持倒立状态。
P+F感应开关届时,全球传感器领域优秀科学家和企业家等,将从不同角度或领域对未来传感器发展的需求情况、传感器存在的问题短板及解决措施等方面做相关解读。同时,围绕传感器领域的技术前沿、产业趋势和热点问题进行高端对话,交流全球传感器科技、产业和应用的最新成果,助力中国传感器产业突破发展瓶颈。
济南感应开关舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo.舵机组成: 舵盘、 减速齿轮、 位置反馈电位计、直流电机、 控制电路板等。
报价感应开关首先是舵机,它的结构是由微电机+大小齿轮组成+微电机控制器+电位器,整体安装在一个“盒子”里的伺服单元,可以利用简单的输入信号精确的转动给定角度。在舵机中有一个电位器或角度传感器来检测输出轴转动的角度,然后控制板就会根据电位器的信息对输出轴的角度进行控制及调节,形成一个闭环的控制系统。舵机也被叫做伺服系统,一般采用是微型直流电机,如N20/N30/030等型号,也有使用无刷直流电机的,具体的看应用参数,当然用无刷直流电机的舵机寿命会更长。
检测摆杆角度所用到的角度传感器种类非常多,常用的有电位器式角度传感器、光电编码器、陀螺仪模块等。由于电位器式角度传感器原理简单,检测精度取决于所用A/D转换器的精度,成本相对较低,因此,综合多方面要求,本系统选用电位器式角度传感器。
1960年代的 Heathkit 模拟计算机但有几个重要的变化即将到来,包括:从经济意义上说,芯片扩展正在放缓或停止,这意味着未来从数字扩展中获得的收益不再得到保证。这是领域特定体系结构的主要驱动因素之一。领域特异性意味着灵活性的价值降低,这在过去对模拟是不利的。刻线限制意味着许多系统将变成多模,而每个模不必在同一技术节点上实现。这可能使更旧、更便宜的节点可以用于模拟。人工智能推理严重依赖于乘/积运算,这在模拟中是非常高效的。近似计算可能会变得更加普遍。延迟正在成为一个更重要的性能需求。“世界是模拟的,所以电路将是模拟的,” Fraunhofer IIS自适应系统部工程高级混合信号自动化组经理 Benjamin Prautsch 说。“有一些类别的IP从数字辅助和完全数字替代中获益显著。然而,由于模拟和数字之间的转换产生了限制,因此需要在系统级别上研究这种好处。一个聪明的模拟电路可能会超越使用数字辅助的媒体电路,但有许多因素和性能衡量会发挥作用。”除了传感器和执行器,无线通信也变得越来越重要。Ansys产品营销总监马克•斯威南(Marc Swinnen)表示:“过去,所有东西都是用网线连接的。”“如今,每一件物联网设备都需要无线连接。他们正在使用无线电通信,这创造了越来越多的模拟和射频内容。此外,当你观察数字信号频率时,它们一直在攀升。5GHz是一个神奇的数字,在这个数字中,电感成为一个重要的参与者,即使在芯片级也是如此。然后,必须考虑电磁效应。如果你想正确地分析它们,这些数字信号看起来非常像模拟信号。当你看到2.5D和3D结构时,这是一个更大的问题,就芯片而言,你有非常高速的导线,可以移动很长的距离。”工艺的进步每增加一个新的节点,数字电路的性能特性就会得到改善。面积下降,性能上升,功率下降,电容下降。然而,这对于模拟就不成立了。每一个新的节点通常都与电压降低有关,这损害了模拟,因为它降低了噪声容限。变化对模拟电路的影响要比数字电路大得多。FinFET为模拟产生了限制。这样的例子不胜枚举。这导致模拟不得不做出妥协。西门子EDA产品经理Sumit Vishwakarma表示:“如果你在单个模具上制造所有东西,比如12纳米,那么模拟就需要移动到相同的工艺节点。”“你被迫失去模拟性能。由于模拟性能在低技术节点上开始恶化,它需要帮助。这就是为什么我们会看到数字辅助模拟设计的涌入。”当模拟电路和数字电路解耦,并采用适当的技术时,模拟电路就不会受损。Semtech信号完整性解决方案集团营销和应用副总裁Tim Vang说:“我们可以设计出在某些情况下与数字电路具有相同甚至更好的功能的模拟电路,我们也可以在较老的节点上做到这一点。”“成本可以更低,因为我们不需要所有的数字功能,所以模具尺寸可以更小。我们可以降低能耗,因为我们没有那么多的功能。”模拟还可以利用更多的制造技术。Vang补充说:“从任何流程节点中获得的东西都是有限的,即使是在模拟中。”“如果你想使用CMOS,我们甚至可以在65纳米技术中做事情。我们也使用其他工艺,如BiCMOS,或硅锗。它们甚至可以更适合与光学元件连接。光学通常喜欢将信号表示为电流,而不是电压,而双极非常擅长驱动这些电流。”随着小芯片获得越来越多的关注,做出这些技术决策增加了更多的灵活性。Mythic公司产品和业务开发高级副总裁蒂姆•韦林(Tim Vehling)表示:“一种小芯片的方法,或者一种异构的方法来整合逻辑或能力,都很有意义。”理论上,模拟计算部分可以保持在40nm或28nm。然后你可以把它和一个有处理器,内存和I/O的数字芯片相匹配,它可能是10nm。它们可以集成到单个包或单个堆叠架构中。随着芯片的出现,模拟技术的寿命更长了。”这也为光学创造了优势。Vang说:“在IEEE和其他标准组织中,他们使用像共封装光学或板载光学这样的词,这一切都是为了使光互连更接近开关和CPU。”“这主要是为了节省驱动整个板到位于底盘前端的光学元件的电力。这些是现在使用的可插拔模块。高速运行时的能量消耗已经足够了,他们一直在推动将模拟光学装置与电路板上的数字开关越来越近。我们认为这是一个巨大的机会,它们将有效地像世界上的光学I/O芯片一样工作。”延迟是一种性能指标,它给数字游戏带来了困难。“我们的模拟引擎运行速度只是数字引擎的一小部分,”Vehling说。“我们在兆赫范围内运行,而不是千兆赫范围。由于数据移动,数字架构与延迟作斗争。对于模拟解决方案,权重是固定的,计算在元素本身内部。从延迟的角度来看,即使在兆赫范围内,我们也比数字架构更快。”这对通信系统有很大的好处。“信号基本上有通过芯片的飞行时间,”Vang说。“没有A-D的转换、数字处理,然后在另一端从D-to-A。解决方案基本上是零延迟,或者接近零延迟。如果您讨论的是从纽约到洛杉矶的互连,延迟不是那么重要,但如果您试图在数据中心内移动几米,延迟的节省是显著的。对于超级计算机用户来说,模拟有一些独特的优势:成本、功率和延迟。”来自AI不断变化的需求数字世界是非常精确、可预测和确定性的。这些要求与模拟相抵触,但这种情况正在改变。“人工智能的准确性取决于模型,”Vehling说。“根据他们选择的模型,准确度会发生变化。如果你选择大一点的模型,它会有更好的精度。较小的模型精度较低。如果你选择不同的精度,你会得到不同的精度。如果您选择不同的分辨率,您的精度将会改变。如果你有一个不同的数据集或者它被训练成不同的,你的准确性将会改变。我们看到有人会修剪模型,因为他们想让它更适合。如果你修剪它,会降低准确性。在数字系统中,一个给定应用程序的模型的精度可能会有很多变化——可能不像在模拟系统中那样变化,但今天肯定会有变化。在任何情况下,人工智能模型的准确性都有很大的变化,更不用说数字和模拟了。”任何人工智能系统的核心都是乘法/累积函数(见图2)。西门子的Vishwakarma说:“执行这些MAC操作所消耗的能量是巨大的。”“部分原因是神经网络有权重,而这些权重需要存储在内存中。他们必须不断地访问内存,这是一个非常消耗能量的任务。如果你比较计算和数据传输的能力,它几乎是前者的1/10。为了解决这个问题,公司和大学研究人员正在研究模拟计算,将权重存储在闪存中。内存计算是一个常用的术语,权值存储在内存中。现在我只需要输入一些输入,然后得到一个输出,基本上就是这些权重与我的输入相乘。”
图1为一阶旋转倒立摆结构示意图。直流电机作为唯一的动力装置,与旋臂保持刚性连接,带动旋臂在水平面内旋转,旋臂的一端通过转轴(本系统选用电位器角度传感器)与摆杆连接,摆杆可做垂直于旋臂的圆周运动。在自然状态下,摆杆为竖直下垂状态。倒立摆控制的目的是通过控制直流电动机的运动状态,使摆杆保持倒立状态。
基于运动信号的感知。基于运动信号的感知主要是通过检测使用者肢体及助行器的运动角度、速度、位置、力等信号判断使用者及助行器的运动趋势和状态。位移传感器、惯性测量单元(IMU)、加速度计等传感器可以检测位置、角度、加速度等运动信号。当使用者进行不同的动作时,使用者身上装备的可穿戴传感器设备也会发生相应的物理量变化,导致检测变量也发生相应的变化,从而得到使用者当前的运动状态。文献[8]设计了一种无线可穿戴传感器系统,并可以实时实现姿态识别和室内定位。文献[9]和[10]均利用新型材料设计了一种可拉伸应变传感器,用于人体的运动检测。文献[11]结合了无线可穿戴传感器与智能助行器系统,用于检测使用者的异常状态。同理可以通过安装在助行器上的位移传感器、倾角传感器等检测出助行器移动的位置及倾斜的角度等信息。另外,可以通过电阻应变式传感器、压阻式传感器、六轴力矩传感器、触觉传感器等检测使用者与智能助行器之间的交互力。由于使用者的需要辅助支撑的程度不同,使用者与助行器的接触方式也不相同,导致测量交互力的传感器位置不尽相同。在杖式助行机器人的研究中,力矩传感器安装在杖式扶手的下方;在助步架式助行器人的研究中,电阻、压阻式传感器安装在手握杆的四周或前臂支撑架的下方,从而测出使用者的行走力意图和起坐力意图。