P+F感应开关1987年3月到1989年的第1阶段试飞中,工作人员在HARV验证机安装了多个气压传感器对飞机周围的气压实施探测,掌握了前机身、机翼以及机尾的气流运动情况。1990年到1994年6月进行第2阶段试飞,这一阶段对飞机硬件、软件进行修改,从而帮助战机实现了70度大迎角机动和35度迎角滚转。1995年3月开始进行第3阶段试飞,对安装在机鼻两侧的折叠翼进行了测试。

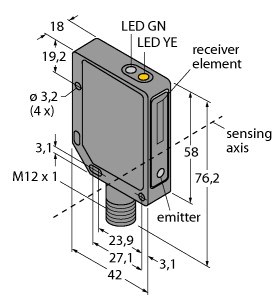
(P+F 漫反射型光电传感器 ML100-8-1000-RT/102/115)
微型设计,易于使用,光斑极为明亮、清晰,全金属螺纹安装,清晰可见的 LED,用于指示通电和开关状态,对环境光不敏感
检测距离 : 0 ... 1000 mm 调整范围 : 100 ... 1000 mm 参考目标 : 标准白色平板,100 mm x 100 mm 光源 : LED 光源类型 : 调制可见红光 偏振滤波片 : 无 光点直径 : 大约 75 mm 相距 1000 mm 发散角 : 大约 2 ° 光学端面 : 向前直射 环境光限制 : EN 60947-5-2:2007+A1:2012 MTTFd : 860 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:通电 功能指示灯 : 黄色 LED,当接收器接收到光时亮起 控制元件 : 灵敏度调节 控制元件 : 亮时接通/暗时接通转换开关 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : < 20 mA 开关类型 : 该传感器的开关类型是可更改的。默认设置为: 亮时接通 信号输出 : 1 路 NPN 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 电压降 : ≤ 1,5 V DC 开关频率 : 1000 Hz 响应时间 : 0,5 ms 产品标准 : EN 60947-5-2 EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证的 2 类电源,或具有有限电压输出且带(可以是集成式)保险丝(最大值为 3.3 A,符合 UL248 标准)的认证电源,1 类外壳 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -30 ... 60 °C (-22 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 11 mm 外壳高度 : 31 mm 外壳深度 : 20 mm 防护等级 : IP67 连接 : 2 m 固定电缆 材料 : 质量 : 大约 50 g 紧固螺丝的紧固扭矩 : 0,6 Nm 电缆长度 : 2 m
聊城感应开关H160M原型机外形颇为科幻,该机基于6吨级H160民用直升机,但经过诸多军事化改装,其核心是HForce模块化武器系统:机鼻增加了雷达、敌我识别装置、光电转塔,座舱正副飞行员配备有头盔显示器,两侧舱门各有一挺7.61毫米舱门机枪;机身两侧增加可挂反舰导弹或机炮吊舱等武器的挂架,滑动舱门上方增加救援绞车,机腹增加货物吊钩,发动机增加进气过滤装置,尾喷管也改为朝上排放,通过旋翼下洗气流来降低红外特征;尾梁右侧增加通讯天线,机身周围增加告警传感器,尾梁根部增加干扰弹发射器。除上述肉眼可见的改进外,H160M与民用型相比,在耐坠毁和防弹性能上也有针对性改进。
现货感应开关失事的印尼狮航JT610航班起飞后不久,失速预警振杆器便因记录机翼迎角的传感器出现故障而启动,错误显示机翼失去了升力,并发出响亮的警报声。为了避免客机失速,客机自动驾驶系统启动了安全措施,让机鼻往下调整。而飞行员发现后,又试图将飞机重新拉升。根据JT610航班的垂直高度变化,这一过程可能反复经历了多次。
P+F感应开关目前,U-2仍在美国空军中服役,数量共计33架。它们的机鼻处、机翼处、机身上部安装的模块化传感器和通讯吊舱所使得U-2的外形互相有些差别。这次出现在阿联酋的是一架U-2S型侦察机,是洛马于2002年的改进型。其在驾驶舱后面有着一个水滴形的大范围,高敏感度卫星数据链吊舱(Senior Span/Senior Spur satellite datalink pod),机鼻处突出的钝头是ASARS-2先进合成孔径雷达系统。
聊城感应开关3个激光告警接收机(LWR),其中两个位于机鼻两侧,一个位于垂尾顶部武器舱后部中间,每个能提供120度的覆盖。可以实现对激光源的定位于用途分析。目前,大量地面防空火力采用光电传感器而非雷达,越来越多的飞机也开始装备红外搜索跟踪装备,其中包括激光测距仪。在这种情况下,实现激光告警能帮助飞行员确定威胁来源、采取规避措施就越来越重要。
现货感应开关伯根航空301号班机是一架隶属土耳其的一家包机公司伯根航空的波音757-23A客机,1996年2月6日,飞机于多米尼加共和国首都圣多明哥起飞后五分钟突然向左倾侧,摔进海里,机上189人(含机组员),无一生还。其后的空难原因调查揭示仪器发生错误的主要原因是飞机驾驶舱外下方的皮托管受损或被堵塞。飞机起飞后约一分钟,驾驶员将飞机设定为自动飞行状态。此时飞机的仰角提高,出现这种状态,是因为飞机空速过高,自动驾驶系统便会抬高机鼻以达至减速效果。但自动驾驶系统是以各种传感器数据作为基础,虽然当时机长的空速表显示飞机超速,可是实际上,副机长的空速表所显示的速度不断减少才是飞机当时的真正状况。机长却忽略副机长的显示器,因而鲁莽地将节流阀往后拉,结果导致飞机失速。当飞机失速时,副机长及后备机长曾向机长建议让飞机机鼻朝下,让飞机以俯冲姿态,令空气在飞机机翼下流过产生升力,飞机便可停止下坠,但当时机长对机员建议完全没有回应。可能是机长当时已方寸大乱,又或是机长认为他的驾驶经验丰富,自尊心令他忽视只有75小时驾驶757经验的副机长的建议。无论如何,他们错过仍有足够高度下挽救飞机的机会,最终导致189人死亡。
FC-31作为一种隐身战斗机,在机鼻安装了嵌入式大气数据系统以降低RCS,该系统由多个L形机身空速管和迎角传感器、侧滑角传感器组成,需要在试飞中对比机鼻试飞空速管采集的大空气动力数据,精心校准后才能发挥作用。FC-31 V2.0原型机取消空速管,说明该机的试飞已经掀开新篇章。
AIRST的升级应该主要是随着电子元器件性能的提升,后端设备的体积有所缩小,同时传感器性能进一步提升,这让安装在机鼻下方的传感器可转动角更大,可用视野范围也更加广阔,不需要再安装分布式孔径传感器来补充盲区了。孔径更大波段更宽且具有随动能力的AIRST,对目标的发现于跟踪能力当然是要比固定安装的DAS更强的。
2017年7月,MALE RPAS项目完成初始概念设计,确定该无人机将配置两台涡桨发动机,其他设计借鉴“梭鱼”、P.1HH“锤头”无人机相关技术;2018年1月,项目完成系统需求审查;2018年4月,在柏林国际航空展上,MALE RPAS首次展示了全尺寸模型。从公布的模型来看,该无人机采用常规气动布局,装配2台涡桨发动机,采用大展弦比机翼和悬臂式T形尾翼,机鼻下装配光电/红外传感器,前机身隆起,内装配航电、任务计算机、雷达载荷等。
在当时,开发团队对于该新型雷达没有提供具体内容,而此次在报道中则给出了比较多的说明。雷达开发商意大利莱昂纳多公司透露,在提升雷达传感器性能方面,关键点是要重新规划设计雷达有源电扫阵列,从而实现接收机的小型化。具体而言,目前有源相控阵雷达天线阵列由小型收发通道(TRM)网格结构组成,每个TRM都生成一个单独的雷达波束,该波束可以跟随不同的目标或与其他波束合成以创建更大的波束。阵列中的TRM分为几组,每组接收到的模拟信号被馈送到接收器,接收器将数据数字化,然后再传递给雷达的处理器。由于现在TRM的尺寸都偏大,所以接收机必须放置在飞机机鼻后部,通过同轴电缆与天线阵列相连接;另外在模拟信号的数字化过程中,极易造成部分雷达信号的损耗/缺失。