P+F感应开关出于多种原因,预计ADAS传感器市场将继续由雷达和摄像头主导。雷达和摄像头已经很好地集成在车辆中,并且这种集成不会影响汽车的美观。与仍然庞大且难以集成的LiDAR相比,添加这样的传感器对于设计人员而言应该不是一项艰巨的任务。需要进一步开发以减小其体积。随着预计2021年推出的成像雷达的出现,雷达技术仍在不断改进,从而可以更好地探测和分类物体。前向ADAS摄像机及其相关的视觉处理也是如此。最新的芯片可实现从单焦点系统到三焦点系统的演进,从而在诸如公路等专用道路上实现自动驾驶功能(图5)。

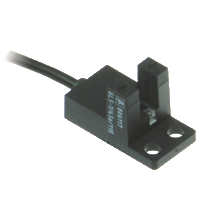
(P+F 漫反射型光电传感器 ML100-8-1000-RT/102/115)
微型设计,易于使用,光斑极为明亮、清晰,全金属螺纹安装,清晰可见的 LED,用于指示通电和开关状态,对环境光不敏感
检测距离 : 0 ... 1000 mm 调整范围 : 100 ... 1000 mm 参考目标 : 标准白色平板,100 mm x 100 mm 光源 : LED 光源类型 : 调制可见红光 偏振滤波片 : 无 光点直径 : 大约 75 mm 相距 1000 mm 发散角 : 大约 2 ° 光学端面 : 向前直射 环境光限制 : EN 60947-5-2:2007+A1:2012 MTTFd : 860 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:通电 功能指示灯 : 黄色 LED,当接收器接收到光时亮起 控制元件 : 灵敏度调节 控制元件 : 亮时接通/暗时接通转换开关 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : < 20 mA 开关类型 : 该传感器的开关类型是可更改的。默认设置为: 亮时接通 信号输出 : 1 路 NPN 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 电压降 : ≤ 1,5 V DC 开关频率 : 1000 Hz 响应时间 : 0,5 ms 产品标准 : EN 60947-5-2 EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证的 2 类电源,或具有有限电压输出且带(可以是集成式)保险丝(最大值为 3.3 A,符合 UL248 标准)的认证电源,1 类外壳 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -30 ... 60 °C (-22 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 11 mm 外壳高度 : 31 mm 外壳深度 : 20 mm 防护等级 : IP67 连接 : 2 m 固定电缆 材料 : 质量 : 大约 50 g 紧固螺丝的紧固扭矩 : 0,6 Nm 电缆长度 : 2 m
莱芜感应开关但是,iToF就不同了。它发射的并不是“直来直去”的激光束,而是经过了正弦波调制,明暗强度呈现规律变换的光信号。这些光信号照射到物体表面之后,也会原样被反射回来,并被iToF的接收传感器所捕捉。只不过iToF的传感器反应速度没有dToF那么快,无法做到精确感知皮秒、纳秒级别的时间差,因此其所捕捉的,其实是反射回来的信号光强度特征。由于iToF的发射光(和反射光)信号是呈现规律变化的,所以对比发射光和反射光的信号差异,就能间接计算出中间经过了多长时间,从而再乘以光速,得出相对距离。
订货感应开关在原色引擎上,华为拟合人类感知色彩的流程(人类感知色彩有两部分:一是人眼看到,二是人脑处理)。模拟人眼的部分做了独特的色彩空间的转化,图像传感器和多光谱传感器获得环境信息后,把RGB转为CIE-XYZ色彩空间,再进行人脑环节的模拟,使得光源色彩变化时保持感知到的物体色彩尽量恒定,这就实现了拍摄的图像基本上和我们人眼看到的一样。
P+F感应开关防爆电子台秤在用户购买的时候就有一个称重范围,用户在称量物体的时候,不能超过称重设备的额定数值,这样才能准确的称量出物体的重量。并且为了使数据的精确性更高,用户在放置物体的过程中,不要猛烈的放,而是轻放轻拿,尤其是在放置的位置上,要能够置于称重设备的中间位置,这样才能够让称重设备的称重机构均匀受力,在传感器信号的传导上才能够稳定,并且能够具有精确的数据显示,这样才用户或者企业工作人员记录数据的时候就不会出错。
莱芜感应开关在LiDAR方面,技术正在从宏观机械扫描转向MEMS扫描和闪存。大多数LiDAR制造商都参与了这些固态技术。LiDAR的问题之一是其与车辆的集成。今天,它已集成在烤架中,但这可能不是理想的解决方案。第一级和原始设备制造商将头灯或挡风玻璃后面的另外两个位置作为目标。为此,将需要更多的研发来减小该传感器的体积并使其集成。LiDAR的另一个问题是需要处理其生成的大量数据。每秒超过25兆操作次数(最高)的高性能计算能力,对于清晰区分和分类道路上的物体(如行人,骑自行车者,汽车或任何其他潜在危险)将是必要的。LiDAR的最后一个问题是与其他两种技术相比的成本。它的成本大约是ADAS单反相机的10倍。除了减小尺寸,还需要降低成本,以供OEM大量采用。
订货感应开关 接近开关有一种对接近它物件有“感知”能力的元件——位移传感器。利用位移传感器对接近物体的敏感特性达到控制开关通或断的目的,这就是接近开关。当有物体移向接近开关,并接近到一定距离时,位移传感器才有“感知”,开关才会动作。
白平衡:白平衡是为了模仿人类视觉系统对不同场景光照能够自动适应颜色的能力而进行的。白平衡常被称为类似人类视觉系统的颜色恒常性。简单来说,颜色恒常性说的是白色的物体无论在日光下,还是霓虹灯环境下,人类视觉系统均会将其认为为白色物体。白平衡需要估计传感器的RGB颜色滤波器对场景光照的响应。这种响应可以通过记录传感器对常见照明(例如日光、白炽灯和荧光等)光谱的响应来在工厂中进行预标定。这些预标定的结果通常会作为白平衡预设的光照环境供用户选择。一种更常见的选择是使用相机自身的自动白平衡(AWB)算法,该算法直接从获取的图像中估计传感器对光照环境的RGB响应。光照环境的估计在计算机视觉和图像处理领域已是一个被充分研究过的课题并已有多种解决方案。下图说明了一个典型的白平衡处理过程。
CMV50000是一个采用专利的8晶体管像素结构制作而成的中片幅48M像素传感器,像素大小为4.6µm,分辨率为7920 x 6002。它的噪音很低,且能够提供绝佳的电子快门效率。全局快门操作意味着能够捕捉到快速移动的物体影像,且不会发生失真。
所谓dToF,正如我们前面讲到的那样,是通过发射器发射出激光束,照射到物体上之后,再使用专门的传感器接收反射光信号,通过直接测量从发射到接收的时间差,乘以光速,就能测量出对象物体的相对距离。之所以苹果将dToF称之为“激光雷达”,就是因为除了发射出去的是激光信号而不是无线电波之外,dToF的工作原理其实和雷达是一模一样的。
此外,ISOCELL Bright HMX还支持Dual Pixel和超级PD对焦技术,即使在弱光环境下也可以识别快速移动物体的距离,从而实现更快速、更准确的自动对焦。同时,3层堆叠的快速读出传感器 (FRS) 可高速捕捉全高清视频画面。