P+F感应开关如果我们要对此进行推测的话,应该就是 iOS 9 对位于 Retina 显示屏幕上方、听筒旁边的 iPhone 6s/6s Plus 的近距离传感器进行了优化。因为安装 iOS 9 之后,所有(包括旧设备)的 iPhone 在用户口袋里又或者是面朝下放置时屏幕都会自动关闭,以便在用户看不到屏幕的时候省下不必要耗费的电量。

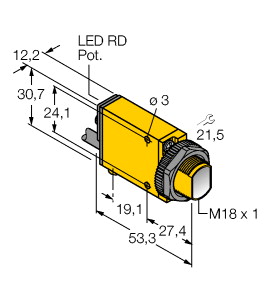
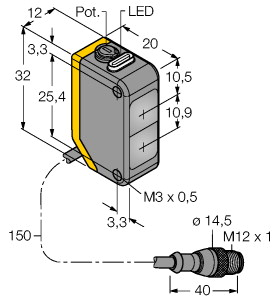
(P+F 漫反射型光电传感器 ML100-8-1000-RT/102/115)
微型设计,易于使用,光斑极为明亮、清晰,全金属螺纹安装,清晰可见的 LED,用于指示通电和开关状态,对环境光不敏感
检测距离 : 0 ... 1000 mm 调整范围 : 100 ... 1000 mm 参考目标 : 标准白色平板,100 mm x 100 mm 光源 : LED 光源类型 : 调制可见红光 偏振滤波片 : 无 光点直径 : 大约 75 mm 相距 1000 mm 发散角 : 大约 2 ° 光学端面 : 向前直射 环境光限制 : EN 60947-5-2:2007+A1:2012 MTTFd : 860 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:通电 功能指示灯 : 黄色 LED,当接收器接收到光时亮起 控制元件 : 灵敏度调节 控制元件 : 亮时接通/暗时接通转换开关 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : < 20 mA 开关类型 : 该传感器的开关类型是可更改的。默认设置为: 亮时接通 信号输出 : 1 路 NPN 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 电压降 : ≤ 1,5 V DC 开关频率 : 1000 Hz 响应时间 : 0,5 ms 产品标准 : EN 60947-5-2 EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证的 2 类电源,或具有有限电压输出且带(可以是集成式)保险丝(最大值为 3.3 A,符合 UL248 标准)的认证电源,1 类外壳 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -30 ... 60 °C (-22 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 11 mm 外壳高度 : 31 mm 外壳深度 : 20 mm 防护等级 : IP67 连接 : 2 m 固定电缆 材料 : 质量 : 大约 50 g 紧固螺丝的紧固扭矩 : 0,6 Nm 电缆长度 : 2 m
济南感应开关6.5英寸2700×1224分辨率OLED显示屏,最高90Hz刷新率,1440Hz PWM调光;高通骁龙888移动平台;后置5000万像素主相机;后置4000万像素黑白相机;后置1300万像素超广角相机;后置6400万像素长焦相机,光学防抖,最多200倍数字变焦;后置独立10通道多光谱传感器;后置激光对焦传感器;前置1300万像素相机;4360毫安时内置电池,66W有线快充;光学屏幕指纹,立体声扬声器,IP68防水防尘。P50 Pro
清仓感应开关6.6英寸2700×1228分辨率双曲面OLED显示屏,最高120Hz刷新率,1440Hz PWM调光;麒麟9000移动平台;后置5000万像素主相机,光学防抖;后置1300万像素超广角相机;后置1200万像素长焦相机,光学防抖,最多80倍数字变焦;后置独立10通道多光谱传感器;后置激光对焦传感器;前置1300万像素相机;4360毫安时内置电池,66W有线快充,50W无线快充;光学屏幕指纹,立体声扬声器,IP68防水防尘。
P+F感应开关4.7 液晶显示电路对于车之一类来说,显示屏是不可或缺的,更加确切的应该是电子里程表。上面显示着车速,里程,耗电耗油量,年月日等等与生活密切相关的信息。给驾驶人以直观明了的人机交互体验。平衡车系统也一样,显示电路是必备的,在显示测量姿态传感器机械安装中值、车体倾角,当前运行时速,电池电量,主板温度等信息上给驾驶人以直观的车体当前状态信息,极大地方便驾驶与维护方面的工作。设计中采用四线SPI串行通信接口的1.3寸OLED显示屏,屏幕集成SSH1106驱动芯片。相较于市面上广泛使用的0.96寸OLED屏来说,除了驱动芯片由SSH1306改为SSH1106其他的基本兼容,只不过1106选用的是13264的RAM,而1306则为12864的RAM,两者操作指令基本相同,1.3寸的屏是从0x02列开始显示的,在初始化的时候修改一下地址即可。具有黄蓝双色,128*64的高分辨率,低功耗等特点,给人以良好的人机交互体验。其接口定义如下:GND→电源地;3V3→电源正;PC15→时钟线(SCL);PC14→数据线(SDA);PC13→MOSI;PB4→MISO;OLED接口电路如图4.7所示。
济南感应开关5.5 OLED显示程序设计中使用的是6线的SPI串行通信的OLED显示屏,它的分辨率为128*64,能显示汉字、图片、字符等多样化的信息。如下程序所示,首先在主函数里初始化OLED_Init()子程序,然后打开OLED的显示函数。可以看到,当前模式下OLED第一行显示的内容为当前小车所使用的是内置的DMP滤波算法,速度处于普通模式下。第二行则显示的是左编码器测量电机转轴的实时速度信息,第三行显示的是右编码器测量电机转轴的实时速度信息,非常的直观明了,有助于驾驶人实时动态的了解车子运行速度以控制在安全速度以内。第五行则是显示当前电池的电压值,让人们时刻知道电池电量以确保电池不会过放而造成不必要的经济损失。第六行显示的信息对于调试来说是非常使用的,它显示的是当前车身的倾角信息,给后期的测试带来极大的便利。核心代码如下:u8 OLED_GRAM[128][8];void OLED_Refresh_Gram(void){u8 i,n;for(i=0;i<8;i++){OLED_WR_Byte (0xb0+i,OLED_CMD); //ÉèÖÃÒ³µØÖ·£¨0~7£©OLED_WR_Byte (0x00,OLED_CMD); //ÉèÖÃÏÔʾλÖáªÁе͵ØÖ·OLED_WR_Byte (0x10,OLED_CMD); //ÉèÖÃÏÔʾλÖáªÁиߵØÖ·for(n=0;n<128;n++)OLED_WR_Byte(OLED_GRAM[n][i],OLED_DATA);}}void OLED_WR_Byte(u8 dat,u8 cmd){u8 i;if(cmd)OLED_RS_Set();elseOLED_RS_Clr();for(i=0;i<8;i++){OLED_SCLK_Clr();if(dat&0x80)OLED_SDIN_Set();elseOLED_SDIN_Clr();OLED_SCLK_Set();dat<<=1;}OLED_RS_Set();}void OLED_Set_Pos(unsigned char x, unsigned char y) 1{OLED_WR_Byte(0xb0+y,OLED_CMD);OLED_WR_Byte(((x&0xf0)>>4)|0x10,OLED_CMD);OLED_WR_Byte((x&0x0f)|0x01,OLED_CMD);}void OLED_Display_On(void){OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDCÃüÁîOLED_WR_Byte(0X14,OLED_CMD); //DCDC ONOLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON}void OLED_Display_Off(void){OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDCÃüÁîOLED_WR_Byte(0X10,OLED_CMD); //DCDC OFFOLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF}void OLED_Clear(void){u8 i,n;for(i=0;i<8;i++)for(n=0;n<128;n++)OLED_GRAM[n][i]=0X00;OLED_Refresh_Gram();//¸üÐÂÏÔʾ}void OLED_DrawPoint(u8 x,u8 y,u8 t){u8 pos,bx,temp=0;if(x>127||y>63)return;pos=7-y/8;bx=y%8;temp=1<<(7-bx);if(t)OLED_GRAM[x][pos]|=temp;else OLED_GRAM[x][pos]&=~temp;}void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 size,u8 mode){u8 temp,t,t1;u8 y0=y;chr=chr-’ ';for(t=0;t<size;t++){if(size==12)temp=oled_asc2_1206[chr][t];else temp=oled_asc2_1608[chr][t];for(t1=0;t1<8;t1++){if(temp&0x80)OLED_DrawPoint(x,y,mode);else OLED_DrawPoint(x,y,!mode);temp<<=1;y++;if((y-y0)==size){y=y0;x++;break;}}}}//m^nº¯Êýu32 oled_pow(u8 m,u8 n){u32 result=1;while(n–)result*=m;return result;}void OLED_ShowNumber(u8 x,u8 y,u32 num,u8 len,u8 size){u8 t,temp;u8 enshow=0;for(t=0;t<len;t++){temp=(num/oled_pow(10,len-t-1));if(enshow0&&t<(len-1)){if(temp0){OLED_ShowChar(x+(size/2)*t,y,’ ',size,1);continue;}else enshow=1; } OLED_ShowChar(x+(size/2)*t,y,temp+'0',size,1); }123}void OLED_ShowString(u8 x,u8 y,const u8 *p){#define MAX_CHAR_POSX 122#define MAX_CHAR_POSY 58while(p!=’0’){if(x>MAX_CHAR_POSX){x=0;y+=16;}if(y>MAX_CHAR_POSY){y=x=0;OLED_Clear();}OLED_ShowChar(x,y,p,12,1);x+=8;p++;}}void OLED_ShowCHinese(u8 x,u8 y,u8 no){u8 t,adder=0;OLED_Set_Pos(x,y);for(t=0;t<16;t++){OLED_WR_Byte(Myzk[2no][t],OLED_DATA);adder+=1;}OLED_Set_Pos(x,y+1);for(t=0;t<16;t++){OLED_WR_Byte(Myzk[2no+1][t],OLED_DATA);adder+=1;}}void OLED_Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);1GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 |GPIO_Pin_14 | GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOC, &GPIO_InitStructure);PWR_BackupAccessCmd(ENABLE);RCC_LSEConfig(RCC_LSE_OFF);BKP_TamperPinCmd(DISABLE);PWR_BackupAccessCmd(DISABLE);OLED_RST_Clr();delay_ms(100);OLED_RST_Set(); OLED_WR_Byte(0xAE,OLED_CMD); OLED_WR_Byte(0xD5,OLED_CMD); OLED_WR_Byte(80,OLED_CMD); OLED_WR_Byte(0xA8,OLED_CMD); OLED_WR_Byte(0X3F,OLED_CMD); OLED_WR_Byte(0xD3,OLED_CMD); OLED_WR_Byte(0X00,OLED_CMD); OLED_WR_Byte(0x40,OLED_CMD); OLED_WR_Byte(0x8D,OLED_CMD); OLED_WR_Byte(0x14,OLED_CMD); OLED_WR_Byte(0x20,OLED_CMD); OLED_WR_Byte(0x02,OLED_CMD); OLED_WR_Byte(0xA1,OLED_CMD); OLED_WR_Byte(0xC0,OLED_CMD); OLED_WR_Byte(0xDA,OLED_CMD); OLED_WR_Byte(0x12,OLED_CMD); OLED_WR_Byte(0x81,OLED_CMD);OLED_WR_Byte(0xEF,OLED_CMD); OLED_WR_Byte(0xD9,OLED_CMD); OLED_WR_Byte(0xf1,OLED_CMD); OLED_WR_Byte(0xDB,OLED_CMD);OLED_WR_Byte(0x30,OLED_CMD); OLED_WR_Byte(0xA4,OLED_CMD); OLED_WR_Byte(0xA6,OLED_CMD); OLED_WR_Byte(0xAF,OLED_CMD); OLED_Clear();1234567891011121314151617181920212223242526272829303132333435363738}5.6 主板温度监测显示主板的温度监测,是笔者在纵观多种电机驱动设计方案后所设计出来的一种基于自然环境下的PCBA的保护。一般的PCB单层电路板多数采用铝基板,多层板则是采用FR-4材料的,他们都有一个正常工作的情况下耐温度值,超过了一定的温度,板子会发生变形、扭曲等状态。而功率场效应管也是一般耐最高温度值多数为150°C或者175°C,那么正常工作的时候肯定是不会到达这么高的温度的,但是当平衡车遇到坑洼,障碍物的时候,电机会几近处于堵转的状态,此时MOS管的输出电流会急剧上升,随之而来的是巨大的发热量。出于安全考虑,在散热片表贴安装多个温度传感器来实时检测MOS管的发热状态以确保行车的安全。int Read_Temperature(void){float Temp;Temp=(I2C_ReadOneByte(devAddr,MPU6050_RA_TEMP_OUT_H)<<8)+I2C_ReadOneByte(devAddr,MPU6050_RA_TEMP_OUT_L);if(Temp>32768) Temp-=65536;Temp=(36.53+Temp/340)*10;return (int)Temp;}5.7 高亮LED车灯闪烁设计高亮的车灯显示,在行进过程中这是必须的。既可以作为照明使用,也可以指示当前车子运行状态。如下程序所示,当MCU判断车身向左转弯的时候,随即以1/200ms的频率不断地闪烁左车灯,当车子向右转往的时候,右车灯也同样以1/200ms的闪烁频率不停地闪烁以表示车子当前为向右转状态。在直线行驶情况下,中间的车灯一直高亮显示,起装饰和照明作用。int turn(int encoder_left,int encoder_right,float gyro){static float Turn_Target=0,Turn,Turn_Convert=3,Turn_Count;float Turn_Bias,Turn_Bias_Integral,Turn_Amplitude=1800; if(Volt > 1.75 || Volt < 1.55) { if(++Turn_Count==1) Encoder_temp=myabs(encoder_left+encoder_right); Turn_Convert=2000/Encoder_temp; if(Turn_Convert<3)Turn_Convert=3; if(Turn_Convert>10)Turn_Convert=10; } else { Turn_Convert=3; Turn_Count=0; Encoder_temp=0; } if(Volt > 1.75) //×óת { Turn_Target-=Turn_Convert; LED3=1; LED6=1; if(led_delay == 1) { LED1=0; LED4=0; }else{ LED1=1; LED4=1; } } else if(Volt < 1.55) { Turn_Target+=Turn_Convert; LED1=1; LED4=1; if(led_delay == 1) { LED3=0; LED6=0; }else{ LED3=1; LED6=1; } } else { Turn_Target=0; LED2=0; LED5=0; LED1=1; LED4=1; LED3=1; LED6=1; }if(Turn_Target>Turn_Amplitude) Turn_Target=Turn_Amplitude; if(Turn_Target<-Turn_Amplitude) Turn_Target=-Turn_Amplitude; Turn_Bias=encoder_right-encoder_left; if(Turn_Off(Angle_Balance) == 0) { Turn_Bias_Integral+=Turn_Bias; Turn_Bias_Integral=Turn_Bias_Integral-Turn_Target; } if(Turn_Bias_Integral>1800) Turn_Bias_Integral=1800; if(Turn_Bias_Integral<-1800) Turn_Bias_Integral=-1800; Turn=Turn_Bias_Integral*0.5-gyro*0.5; return Turn; 1234567891011121314151617181920212223242526272829303132333435363738394041424344454647484950515253545556575859606162636465}
清仓感应开关蓝圈中2个3pin接口的就是背板后面的2个风扇电源3pin,这个在后面安装的时候还发现了一个问题,就是会触发报警。显示屏电路板上软封装的IC、温度传感器、蜂鸣器等等,这点在下单前倒真没想到这点,觉得顶多就是显示个温度而已,这里在开机显示的时候会具体介绍一下功能。下面的是主机电源开关线,老三样:硬盘灯线、电源灯线,PTN电源开关线,没有复位线。
安防巡逻机器人可以实现自助导航、自动避障、自助规划行走路线,并且通过人工智能、结合多传感器和定制开发的机器人,可以进行设备检测,机房环境检测、资产盘点、故障报警等功能。对比人工24小时值守,使用机房巡检AI机器人进行24小时巡逻,效率更高而成本更低。安防巡逻机器人再加上触控显示屏和身份识别模块,可以进行更智能的交互和内部工作人员的身份核验。
故障现象:客户反映一个月前车辆因前部碰撞,在某修理厂事故修复后,发动机运转和车辆行驶都很正常,就是仪表小显示屏总报警“请加注冷却液”,维修师傅检查找不到冷却液液面传感器,水箱和补水壶里的冷却液也不缺,不影响车辆的行驶,去了几次修理厂结果都是无功而返,后来经朋友介绍来到本厂检修。
bod仪【霍尔德HED-BOD2】采用国家标准(HJ-505-2009)5日培养法,无汞压差检测法,使用安全可靠;仪器含有6个单元独立显示测试位,每个单元测试位单独计时测试,每个测试位内置锂电池,检测途中断电不影响结果.每个测试位独立显示取样量、测定值、测定时间、上传数据与所有测定信息.自动完成测量过程、无需专人看管、安全可靠、智能微电脑控制.功能特点:1、直接显示每个通道BOD检测数据结果;2、采用彩色显示屏,每天自动显示测量数值;3、使用无汞压差检测法,测量水中BOD,安全可靠,操作简单;4、采用微处理器控制系统,自动完成测量过程,无需专人看管;5、采用进口传感器,性能稳定,漂移少,测量准确;6、测量样品数量1-6,可任意选择单个样品开始时间;7、配备内置锂电池供电,检测中途停电不影响结果;8、存储空间大,可存储10万以上检测结果;9、测量过程无需专人看管,不怕断电,全程智能化监控;10、具有支持连续、间隙式搅拌功能;
OPPO R9s采用5.5英寸1080P分辨率显示屏,搭载骁龙八核64位处理器,4GB RAM+64GB ROM内存组合,1600万像素前置摄像头+1600万像素后置摄像头;后置摄像头搭载全新旗舰传感器IMX398,并采用双核对焦技术,对焦速度提升40%,辅以F1.7超大光圈,在夜拍方面更胜一筹;搭载3010mAh电池,支持低压VOOC闪充功能。