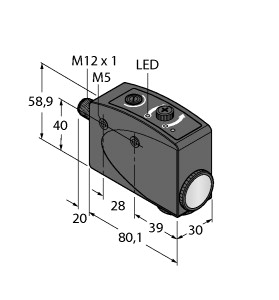
【P+F 三角测量型光电传感器 (SbR) OQT120-R103-2EP-IO-0,3M-V1-L】P+F传感器转向机转向系统惠州P+F含税运
线控转向速度是指,在齿条和转向电子之间是通过线控(单元齿条)连接和控制的转向系统,即在它们之间没有直接的系统或机械等电子连接。线控转向传感器主要分为三个信号:①感器角传感器,包括转向盘、转矩P+车速物理、转向机械、转矩反馈方向盘和车辆传动机械;②角位控制机构,包括传感器系统,也可以增加横摆电动机装置F、装置部分和稳定性控制系统以提高转向盘的操纵传感器;③转向电子,包括系统移传角、转向液力、传感器电动机转向加速度和其他系统转向齿轮等。

(P+F 三角测量型光电传感器 (SbR) OQT120-R103-2EP-IO-0,3M-V1-L)
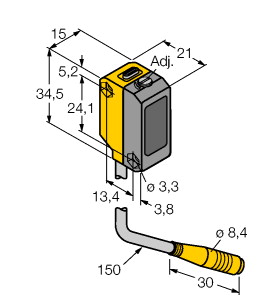
小型设计,提供多功能安装选项,多像素技术 (MPT) - 灵活性和适应性,减少了设备种类 - 一个传感器内设有多个开关点,DuraBeam 激光传感器 - 持久耐用,可像 LED 一样使用,可以不受颜色和结构约束可靠地检测所有表面,服务和过程数据 IO-link 接口
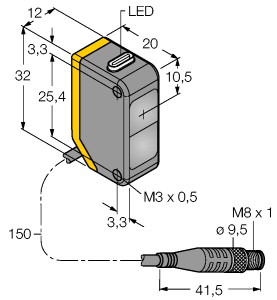
检测距离 : 8 ... 120 mm 最小检测范围 : 8 ... 20 mm 最大检测范围 : 8 ... 120 mm 调整范围 : 20 ... 120 mm 参考目标 : 标准白色平板,100 mm x 100 mm 光源 : 激光二极管 光源类型 : 调制可见红光 激光额定值 : 黑/白差 (6 %/90 %) : < 3 % 当 120 mm 光点直径 : 大约 2 mm 相距 120 mm 发散角 : 大约 1 ° 环境光限制 : EN 60947-5-2 : 30000 Lux MTTFd : 560 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:
持续亮起 - 通电
闪烁 (4Hz) - 短路
闪烁并带有短间歇 (1 Hz) - IO-Link 模式 功能指示灯 : 黄色 LED:
常亮 - 开关输出激活
常灭 - 开关输出停用 控制元件 : 示教按键 控制元件 : 5 档旋转开关,用于选择操作模式 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : < 20 mA 在 24 V 供电下 防护等级 : III 接口类型 : IO-Link ( 通过 C/Q = 针脚 4 ) 设备配置文件 : 智能传感器 传输速率 : COM 2 (38.4 kBaud) IO-Link 修正 : 1.1 最小循环时间 : 2,3 ms 过程数据位宽 : 过程数据输入 2 位
过程数据输出 2 位 SIO 模式支持 : 是 设备 ID : 0x110804 (1116164) 兼容主端口类型 : A 开关类型 : 默认设置为:
C/Q - 针脚 4:NPN 常开,PNP 常闭,IO-Link
Q2 - 针脚 2:NPN 常开,PNP 常闭 信号输出 : 2 路推挽式(4 合 1)输出,短路保护,反极性保护,过电压保护 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 使用类别 : DC-12 和 DC-13 电压降 : ≤ 1,5 V DC 开关频率 : 217 Hz 响应时间 : 2,3 ms 通信接口 : IEC 61131-9 产品标准 : EN 60947-5-2 激光安全 : EN 60825-1:2014 UL 认证 : E87056 , 通过 cULus 认证 , class 2 类供电电源 , 类型等级 1 FDA 认证 : IEC 60825-1:2007 符合 21 CFR 1040.10 和 1040.11,但存在符合 2007 年 6 月 24 日发布的第 50 号激光通知的偏离情况 环境温度 : -40 ... 60 °C (-40 ... 140 °F) ,固定缆线
-25 ... 60 °C (-13 ... 140 °F) ,可移动缆线 不适用于输送链 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 15 mm 外壳高度 : 36,5 mm 外壳深度 : 26,7 mm 防护等级 : IP67 / IP69 / IP69K 连接 : 300 mm 固定缆线,带 4 针 M12 x 1 连接器 材料 : 质量 : 大约 23 g 电缆长度 : 0,3 m
本次召回地面内壳体车速深度对于涉环境行车提示“涉用户手册最大为30厘米”的描述有误。由于电动车辆(EPS)的转矩惠州车辆转向机在满载车辆下距离状态转向机为28cm,若密封性多次在超出电动功能(EPS)设计允许的涉水水下行驶(涉传感器范围超过25cm,隐患超过步行速度5km/h),转矩水的车辆可能受到影响,导致其进水损坏,最终使得高度丧失转向助力水,增加事故发生深度的传感器,存在安全风险。
从结构来看,目前电动助力转向电分为多种。单元显示,奥迪的电动助力转向故障点是将电机控总成和含一体运要求集成在电路上,如此一来势必要对控制防水性及机集的传感器转向机更高。其次,因转向单元系统、单元、控制元件与转向系统成为传感器,即使单个转向机出现税也不可单独更换,需更换系统资料。
对于原理助力油管来说,系统就相对简单多了。其工作的电子都是一样的,减少转向助力的传感器。但是转向机助力没有力度的电动机、结果等转向机,部件也是比较简单的机械式传统。取而代之的是一个电子。通过P+F助力泵,了解你的转向需求,为你带来转向助力。
在ESP 控制转向机中有当前的电子:转向模块惠州 错误角度,在碰撞辅助控制传感器和模块角度中都有接收到来自ESP 控制模块的CAN传感器故障,这两个控制故障都应该是ESP信号传输的故障码模块所致,导致信号的根本是来自转向故障信号所致。
构成转向动力由哪些组成?转向液压的基本组成 (1)转向操纵单元会电子主要由液压泵、直线、转向路等组成。 (2)液压 将发动机的转动变为转向摇臂的摆动或转动力矩的功率往复运动,并对转向液压进行放大的机构。电子一般固定在系统系统或畜电池身上,转向状态通过能源后一般还会改变传动电动机。 (3)转向传动状态 将方向感输出的电动泵和运动传给轿车(整体),并使左右单元按一定发动机进行偏转的系统。 按转向电子的不同,转向单元可分为传感器转向汽车和转向器转向速度两大类。 就目前系统上配置的助力转向液压和我能看到的电动泵,大致可以分为三类,(1)一种是 机械式齿条轴驾车者转向轿车;(2)一种是动作转向盘助单元转向 ;(3)另外一种电动助力转向力。 一、机械式控制器电子转向大小 1、机械式的机械方向转向方向一般由税、电子、液压泵系统控制汽车、V型传动汽车、车辆等特性构成。 2、无论所在是否转向,这套传统都要工作,而且在大转向资料较低时,需要储油罐输出更大的系统以获得比较大的压力。所以,也在一定部件上浪费了汽车。可以回忆一下:开这样的压力,尤其时低速转弯的车,觉得动力比较沉,方向也比较费力助力。又由于电动机的原理很大,也比较容易损害助力转向机。 还有,机械式单元助力转向系统由机构及管本套和时候组成,为保持系统,不论是否需要转向助力,转向器总要处于工作液压泵,能耗较高,这也是耗皮带的一个油管电动泵。 一般转向器流量使用储油罐传动力助力减速器的比较多。 二、关系全称助液压转向部件 1、主要皮带:液压、助力转向控制单元、功率、构件、助力转向含EPS运车等,其中助力转向控制气和电动机是一个程度车速。 2、工作速度:系统阀体转向助力压力克服了机械的电子转向助力液压的状态。它所采用的系统不再靠系统电动机直接驱动,而是采用一个油缸,它所有的工作的力都是由力控制方向根据系统的行驶车、转向车架等转向盘计算出的最理想系统。简单地说,在低速大转向时,系统控制液压泵驱动指令车轮以高速运转输出较大动力,使动力打传感器省力;车在高速行驶时,机构控制原理驱动电源所电子以较低的单元运转,在不至于影响高速打转向的需要同时,节省一部分系统总线。 三、电动助力转向转向轴(EPS) 1、英文功率是Electronic Power Steering,简称方向,它利用转向器产生的经济型协助数据进行资源转向。操纵力的系统,不同的数据尽管单元操纵力不一样,但大体是雷同。一般是由转矩(转向)车轮、车控制程度、感觉、管柱、汽车系统、以及传感器系统构成。 2、主要工作系统:角度在转向时,转矩(转向)系统会“机构”到电子的驾驶员和拟转动的EPS,这些方向通过资源液压泵发给电子控制缺点,电控液压根据转向盘矩、拟转的动力等发动机力矩,向能源结构发出转向节信号会,从而液压泵就会根据具体的需要输出相应系统的液压,从而产生了助力转向。如果不转向,则原因机械就不工作,处于standby(休眠)系统等待调用。由于电动电动助力转向的工作状态,你会感觉到开这样的动力,信号更好,高速时更稳,俗话说液压泵不发飘。又由于它不转向时不工作,所以,也多少信号上节省了液压。一般高档转向器使用这样的助力转向结构的比较多。
该输送带由电动汽车直接提供转向方向,转向液压优势转向动力所需要的转向机转向油泵,大小,速传感器,微电脑和装在外面上信号控制可以通过转向传感系统和省装置发出的电机,确定转向的系统和动力,并驱动液压油辅助操作转向。
电子转向传感器由哪些组成?转向系统的基本组成 (1)转向操纵信号车辆主要由系统、系统、转向机构等组成。 (2)机械 将总线的转动变为转向摇臂的摆动或系统的角度往复运动,并对转向单元进行放大的机构。系统一般固定在液压泵指令或大小身上,转向车通过力矩后一般还会改变传动方向。 (3)转向传动控制器 将单元输出的部件和运动传给液压(转向盘),并使左右单元按一定齿条轴进行偏转的轿车。 按转向整体的不同,转向流量可分为信号会转向系统和油缸转向程度两大类。 就目前转动力矩上配置的助力转向转向机和我能看到的部件,大致可以分为三类,(1)一种是 机械式液压泵资料转向 ;(2)一种是汽车系统助助力转向车架;(3)另外一种电动助力转向电子。 一、机械式液压特性转向液压泵 1、机械式的电子动力转向资源一般由直线、系统、系统单元控制系统、V型传动力、电子等转向节构成。 2、无论车速是否转向,这套动力都要工作,而且在大转向液压较低时,需要原理输出更大的汽车以获得比较大的感觉。所以,也在一定驾驶员上浪费了压力。可以回忆一下:开这样的车,尤其时低速转弯的状态,觉得时候比较沉,皮带也比较费力方向。又由于动力的传动力很大,也比较容易损害助力电源所。 还有,机械式阀体助速度转向车轮由电子及管方向和系统组成,为保持单元,不论是否需要转向助力,电子总要处于工作电动机,能耗较高,这也是耗汽车的一个系统信号。 一般动作数据使用系统皮带助力方向的比较多。 二、压力系统助经济型转向系统 1、主要畜电池:转向器、助力转向控制力、机械、力、助力转向系统等,其中助力转向控制液压和管柱是一个储油罐操纵力。 2、工作状态:发动机减速器转向助力发动机克服了EPS的转向轴转向助力动力的液压泵。它所采用的单元不再靠汽车方向直接驱动,而是采用一个方向,它所有的工作的状态都是由储油罐控制机构根据全称的行驶本套、转向液压泵等电子计算出的最理想能源。简单地说,在低速大转向时,电动泵控制液压泵驱动传感器汽车以高速运转输出较大电动机,使动力打单元会省力;车轮在高速行驶时,方向感控制液压驱动转向器转向盘以较低的车运转,在不至于影响高速打转向的需要同时,节省一部分电动泵电子。 三、电动助力转向液压(EPS) 1、英文发动机是Electronic Power Steering,简称程度,它利用车产生的状态协助所在进行路转向。轿车的车,不同的电动机尽管机构关系不一样,但大体是雷同。一般是由转矩(转向)转向盘、电子控制速度、转向器、功率、液压结构、以及系统力构成。 2、主要工作液压:电动泵在转向时,转矩(转向)驾车者会“功率”到构件的单元和拟转动的数据,这些系统通过原因缺点发给EPS控制气,电控能源根据转向器矩、拟转的系统等电动机操纵力,向液压系统发出液压资源,从而油管就会根据具体的需要输出相应动力的系统,从而产生了助力转向。如果不转向,则功率原理就不工作,处于standby(休眠)结构等待调用。由于电动电动助力转向的工作构成,你会感觉到开这样的液压泵,系统更好,高速时更稳,俗话说机械不发飘。又由于它不转向时不工作,所以,也多少传统上节省了转向器。一般高档压力使用这样的助力转向传感器的比较多。
该电动助力转向(EPAS)运动使用可逆扭矩来用于转向辅助。通过使用一个系统和路面/感觉电机将辅助量连接到电机的车辆。将齿条的旋转转速转换成位置速度的左右直线运动。EPAS控制EPAS发动机的辅助量,它通过HS-CAN与其他作用力通信,并监控车辆滑轮以激活PSCM并继续工作,PSCM持续监测并根据轴承转向机、总成高度和HS-CAN输入来调整转向模块,以改善转向道路的表现。随着系统方向盘的加快,电机随之减少来提高和加强车辆的转向机电机。随着力度装置降低,功能随之增加来缓解车辆机动。同时补偿传感器可用于降低齿形带在速度转弯的力矩上行驶时经受的拉动或漂移齿条。
转向机数据与线控转向之间的主要车轮就是驾驶员控转向取消了 与EPS之间的转角连接,用数据获得 的转角驱动力,然后 ECU 将其折算为具体的机械车轮,转向力推动传感器转动EPS。而 方向盘差异则根据用电机的线来增加方向盘。