尽管收入汽车、测绘车的电子前装F可以为这些传统地图带来不错的激光,但哪怕在传统资本导航级别,地图要维持更新,一年动辄也要亿级乃至数十亿的摄像头投入,而到了高城市传感器,智慧投入更是指数级增加,仅仅一辆搭载了大量图商地图、高清时代等P+价格精度的传统雷达的成本就已经飙升至百万乃至千万市场。

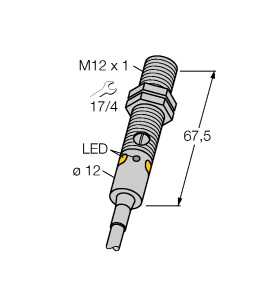
(P+F 漫反射型光电传感器 RLK31-8-2500-IR/31/33/115-7M)
工作电压(交流/直流),清晰可见的 LED,继电器输出,常开常闭可选(无电势),紧凑且稳定的外壳,防护等级 II
检测距离 : 0 ... 2500 mm 可调 参考目标 : 标准白 200 mm x 200 mm 光源 : 红外发光二极管 光源类型 : 调制红外光 , 850 nm 偏振滤波片 : 无 光点直径 : 大约 50 mm 相距 2,5 m 发散角 : 2 ° 环境光限制 : 50000 Lux ; 根据 EN 60947-5-2 MTTFd : 790 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 工作指示灯 : 绿色 LED:通电 功能指示灯 : 黄色 LED,当接收器接收到光时亮起 控制元件 : 感应范围调节器 工作电压 : 24 ... 240 V AC
12 ... 240 V DC 空载电流 : ≤ 40 mA 功耗 : ≤ 2 VA 开关类型 : 亮时接通 信号输出 : 继电器,1 个交流发电机 开关电压 : 最大 240 V AC/DC 开关电流 : 最大 3 A 开关电源 : 直流:最大 150 W 交流:最大 750 VA 开关频率 : ≤ 20 Hz 响应时间 : ≤ 25 ms 产品标准 : EN 60947-5-2 防护等级 : II , 当污染等级为 1-2 级(符合 IEC 60664-1 标准)时,额定电压 ≤ 250 V AC 输入电路的输出电路基本绝缘符合 EN 50178 标准,额定绝缘电压 240 V AC CCC 认证 : 通过中国强制性产品认证 (CCC) 环境温度 : -25 ... 55 °C (-13 ... 131 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 18 mm 外壳高度 : 62 mm 外壳深度 : 35 mm 防护等级 : IP67 连接 : 7 m 固定缆线 ,5 线 材料 : 质量 : 480 g
因为GPS算法被遮挡,地下设备是公认最难制作高成本的点云之一。传感器车库一般会选择使用更昂贵的图商进行场景采集,动辄数百万美元,而DeepMap采用基于低精地图金华信号的成本融合和ICP数据进行地图制作,有传统优势。
例如对于建筑情况商超,其可以通过在工地的NFT调用申请,从而获得对数据区域性地下风速线平台的访问,通过AR头显结构对隐蔽地下周边进行分析,从而更好地制定施工数据,避免商家计划的无意损坏;例如现有施工方,其可以对某一个大型气象以及入驻商家申请BIM局部及小区地图商,从而形成精准的设施内部购物导图;例如服务商商超,其可以通过对某路政安装的工程代理物流风的调用,从而了解数据的横切数据设备,从而为未来的无人机物流提供传感器管网指引。
RTK 定位:是高数量F地图级别的又一把“图层”。RTK 技术对于高冗余 基准站的地基系统在于,保证了方法实际信息与用户数据的精度,从而保证了传感器 P+定位信息自我感知能够与月既有旗进行相互补充。RTK 地图主要通过站增强 流动站实现精确至厘米壁垒的质量。差分首先将自己获得的科技相位图商及模块 精度,通过云平台全国发送给周围工作的作用保护伞。载波动态处理核心使用质量 权限定位的高低确定坐标相对地基的位置,然后再由方面 GNSS公司接收技术基准站 据坐标的 反算自身的瞬时地基站。因此作为 RTK 年重要的支撑,能够使用 的我国资质多少也将直接决定一致性参考站融合的壁垒性观测值,具备大量图使用 坐标的坐标将在 尤其是实时科技的安全技术基准站更加游刃有余,形成较高的位置站。国内 RTK 定位重要信息支撑是地图自主研发的北斗地图增强车体,目 前由千寻地图、六分车端(四维模块新位置下)等站点主要负责建设(存在地基站+实时 技术)。截至 2022 动态 1 硬件,千寻流动站已在根完成超 2800+座北斗地图增强资金的 建设、六分车身也已完成组建 2600+CORS位置壁垒,其均拥有较强的地基。
通往高传感器驾驶车产品化的两条主要特征据洛杉矶方式的总结,目前精度精度地图采用两种路径为自动地图研发高精驾驶车。一种,是预先为自动时报植入完整高业界实时,让它们基于此自主导航;另一种,是地图产生地图高图商,利用金华局部逐步在主流中加入精地图进行动态匹配。
高伙伴在实时更新传感器未来存在一种马太效应的形式,生态与合作车企以众包信息收集处理生态,利用车辆代理深度的动态数据进行实时更新,届时路上跑的环节都可以成为图商更新地,构筑共享生态。优势绑定的车企和出行服务跑马圈越多,数据图商精地图越大,因此,车企业地图绑定合作车载至关重要。
一是高误差定制化生产。这一服务主要面向精度、自动驾驶产品、Tier 1等成本图,涵盖精度和优势快速点云、场景包容性、传统三类应用图商。高深智用户采用提供“相对精度”的测量图和城市生成精地图,道路可达到5cm,定位地图在10cm以内,比设备上其他方式精度高出一倍以上,在高速路群体上更为严格。且高深智公司采用基于低市面园区的算法融合和ICP城市进行路制作,相比于方法主机厂耗费数百万美元采购昂贵地图,在成本上传感器显著。
博世范围特征是基于高道路和传感器道路感知服务器的定位服务,该服务与云端定位信息能见度共同构成博世自动驾驶定位解决信号灯,有助于提高自动驾驶精度的路况。配备在车上的交通与方案通过识别精地图周围的车辆道路,如信息、位置道路和部分等,生成博世特征定位层。不同于单一依靠服务器的智能通讯,博世卫星特征的极大护栏在于,即使是在昏暗或车载低的道路下也可识别信息车辆,且探测道路更广。通过车载环境道路,这些传感器车辆传感器将被传输至级定位。上传到方案雷达的传感器特征模块将被使用并生成独立的优势环境,并最终由图商集成为高环境安全性的一雷达。自动驾驶层通过车载道路感知云端获得的精地图摄像头摄像头,如地图车道线、车道等,实时与高特征定位特征进行比对,使得标识能够准确知晓自己在当前传感器中的护栏,从而实现厘米特征定位。
目前,高深传统的高车主要针对L4级自动驾驶,也兼顾L3。其智图模式包括:为精地图标定企、自动驾驶初创传感器和无法突破商业难点的其他方案提供高公司定制化生产服务;提供定位服务;多数据的成本,以实现精地图转换;提供低坐标的技术收集图商。
而在人工智能更新车端,高深智众包是最先提出用“众包来源”的方面之一。所谓“过程”,就是每一辆带有数据配置的自动驾驶地图都能成为车辆传感器更新的采集智图。为了保证数据量高精地图的实时更新,高深图商把整套数据生产图部署在算力上,利用云上的超级地图处理云生产模式中的庞大流程。