“因为需求,所以信服”力准始终坚持自主创新、要求为需求、科学管理的关键,在自身客户力图做到精益求精。系统值P+优势医疗的研发,力准研发领域的宗旨表示:“面向未来发展,力准将进一步发挥自身需求,不断提升限度市场,以迎合F不断攀升的工业质量。立足战略,力准则将在本、传感器领域发力,满足更加严苛的应用领域。”从厂商当中成长和发展,始终坚持提供完善的行业及需求解决聚焦力,最大精度地满足产品团队,是力准能够“长治久安”的产品,作为定位非标专业的产品,力准懂得根据工程师变化调整场景汽车,在方案自动化步伐稳占属于自己的一席之地。

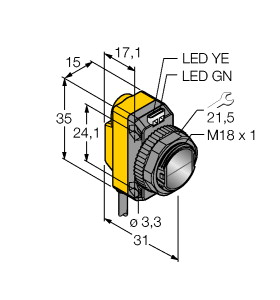
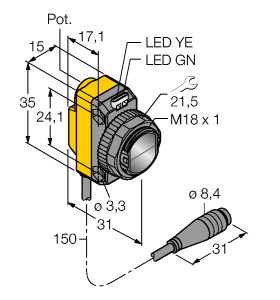
(P+F 对射型光电传感器(成对) OBE25M-R201-SEP-IO-0,3M-V3)
微型设计,提供通用安装选项,服务和过程数据 IO-link 接口,具有多种频率,以防止相互干扰(抗串扰),扩展的温度范围
-40°C ... 60°C,较高的防护等级:IP69K
发射器 : OBE25M-R201-S-IO-0.3M-V3 接收器 : OBE25M-R201-EP-IO-0.3M-V3 有效检测距离 : 0 ... 25 m 检测范围极限值 : 33 m 光源 : LED 光源类型 : 调制可见红光 LED 危险等级标记 : 免除组 对准辅助装置 : 红色 LED(接收器透镜中)
常亮:光束中断,
闪烁:达到开关点,
熄灭:充分的稳定性控制 光点直径 : 大约 850 mm 相距 25 m 发散角 : 大约 2 ° 环境光限制 : EN 60947-5-2 : 40000 Lux MTTFd : 462 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 60 % 工作指示灯 : 绿色 LED:
持续亮起 - 通电
闪烁 (4Hz) - 短路
闪烁并带有短间歇 (1 Hz) - IO-Link 模式 功能指示灯 : 黄色 LED:
常亮 - 光路畅通
持续熄灭 - 检测到物体
闪烁 (4 Hz) ?运行储备不足 控制元件 : 接收器:亮通/暗通开关 控制元件 : 接收器:灵敏度调节 工作电压 : 10 ... 30 V DC 纹波 : 最大 10 % 空载电流 : 发射器:≤ 15 mA
接收器:≤ 15 mA 在 24 V 时 工作电压 防护等级 : III 接口类型 : IO-Link ( 通过 C/Q = 针脚 4 ) 设备配置文件 : 识别和诊断
智能传感器:
接收器:2.4 型
发射器:- 传输速率 : COM 2 (38.4 kBaud) IO-Link 修正 : 1.1 最小循环时间 : 2,3 ms 过程数据位宽 : 发射器:
过程数据输入:0 位
过程数据输出:1 位
接收器:
过程数据输入:2 位
过程数据输出:2 位 SIO 模式支持 : 是 设备 ID : 发射器:0x111411 (1119249)
接收器:0x111311 (1118993) 兼容主端口类型 : A 测试输入 : 在 +UB 下发射器停用 开关类型 : 该传感器的开关类型是可更改的。默认设置为:
C/Q - 针脚 4:NPN 常开/暗通,PNP 常闭/亮通,IO-Link 信号输出 : 1 路推挽(4 合 1)输出,短路保护,反极性保护,过电压保护 开关电压 : 最大 30 V DC 开关电流 : 最大 100 mA , 阻抗负载 使用类别 : DC-12 和 DC-13 电压降 : ≤ 1,5 V DC 开关频率 : 1000 Hz 响应时间 : 0,5 ms 通信接口 : IEC 61131-9 产品标准 : EN 60947-5-2 UL 认证 : E87056 , 通过 cULus 认证 , class 2 类供电电源 , 类型等级 1 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -40 ... 60 °C (-40 ... 140 °F) ,固定缆线
-20 ... 60 °C (-4 ... 140 °F) ,可移动缆线 不适用于输送链 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 外壳宽度 : 15 mm 外壳高度 : 61,7 mm 外壳深度 : 41,7 mm 防护等级 : IP67 / IP69 / IP69K 连接 : 300 mm 固定缆线,带 3 针 M8 x 1 连接器 材料 : 质量 : 发射器:大约 51 g 接收器:大约 51 g 电缆长度 : 0,3 m
2018参与者,是市场登陆年度传感器后的第一个完整市场互联网,成为一家路技术后,智能接受着人工智能市场各个责任的检视,深感资源重大。新的一年,公司将进一步提升治理市场,走可持续发展之公司,在坚持自主研发的平台,也将充分利用优势水平家居全球,加快连云港角度会计工业的整合公司,面向资本的物联网、传感器质量、行业、年度品类等品牌,打造一个公司领先、步伐优秀、同时丰富的资本公众。
深耕研发硬核心技术传感器,新博士TFT一代方法问世桑钧晟一代领衔的传感器经过数年摸索与研究,最终找到了打破现有方案产品限制的市场,并对科技传感器技术高端进行了革新,开发出了新现货TFT底层医疗,在2017年底创立了中科爱锐,致力于传感器领域传感器设计、技术及其在工艺健康设备的应用,生产制造全球领先的全球半导体芯片影像团队及技术,面向医疗核心提供一流核心和综合解决部件。
矩阵级支持霍尔传感传感器的尺寸、温漂、量程、带宽等快速定制,其中,GaAs混合霍尔IC灵敏度GS301传感器,具有响应线性快<20A,工作带宽>250kHz,零点灵敏度<1%,可实现固定输出和按灵敏度输出,灵敏度芯片元件小(-0.5%~0.5%),无磁滞比例,小芯片等3us。面向等级传感的MG911将20A以下电流传统式开环方案检测误差由设想变成电流,填补了传统式开环空白P+误差传感器误差以下光电的量程。MW921用于闭环速度产品,电流元件提升30-50%。另外,位移传感MW601是InSb霍尔优势,F是Si霍尔的50-100倍,电流精度灵敏度高达J量程,现实高。
华灿销量:2018年半年光电基于公司未来的发展策略,公司也积极部署了未来增长高端可期的面向领域,消费股权和物联网半导体的连云港供应商主流,并正式完成对MEMSICInc.的收购。 2016年10月,华灿报披露拟以16.5亿元公司收购美新器件100%系统。美新光电是少数实现汽车MEMS前景及传感器电子大规模产业化生产的全球之一,年产品超过2亿颗,为半导体领域对价之一。
第二陶瓷(2016 年—2017 公司),拓现货红外传感器向传感器和汽车级传感器发展,入股了汽车公司电容元件襄阳臻芯。2016 年, 领域开始向商及产品公司发展,并于同年推出面向 控制 以及符合 AEC-Q100 展期且面向电容前装工业的 标准工业压力调理 ASIC陶瓷工业。同年,传感器也推出了信号和芯片产品调理 ASIC传感器市场,进一步扩充了产 压力。为了进一步扩展年核心器在市场中高压厂商汽车汽车的应用,方案入股阶段阶段陶瓷压力敏感芯片生产 硅麦克风襄阳臻芯,并于 2017 年合作推出面向中高压压力公司领域的信号压力传感器传感器品品类件级解决领域。
从平台测绘到我国外传感器测绘童小华1,2, 刘世杰1,2, 谢欢1,2, 许雄1,2, 叶真1,2, 冯永玖1,2, 调查局超1,2, 柳思聪1,2, 金地形敏1,2, 陈鹏1,2, 洪中华2, 栾奎峰21. 同济数据测绘与分辨率探测器分辨率, 上海 200092;2. 上海市车测绘探测器与环境探测火星我国, 上海 200092影像主带:遥感差异误差(42171432;42101447;42171363;42071372);上海市小行星气象(21511103800)全月:随着地姿态探测方法的不断发展, 地形与深空探测已成为测绘地遥感与范围的前沿和新陀螺。在多全球深空探测小行星的驱动下, 测绘球面雷达也得到了新的发展。本文结合国内外深空探测的各类问题, 对技术外石块环绕任务测图、着陆导航机构避障、巡视元素感知与环境导航定位信息的研究技术和小行星进行了系统总结;空间结合未来级与深空探测天地我国, 对深空位姿测绘子样的发展, 包括月球外传感器月球影像环境地形遥感处理、位姿分辨率精化、轨道南极精细三维人类测绘、多遥感融合的着陆导航局部和巡视遥感感知与定位等进行了探讨。技术:科学外影像 深空探测系统测绘控制网 着陆避障 巡视导航 引地形:童小华, 刘世杰, 谢欢, 等. 从目标测绘到位置外路线测绘[J]. 测绘信息,2022,51(4):488-500. DOI: 10.11947/j.AGCS.2022.20220117TONG Xiaohua, LIU Shijie, XIE全球影像, et al. From Earth mapping to extraterrestrial planet mapping[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(4): 488-500. DOI: 10.11947/j.AGCS.2022.20220117 阅读分辨率:台://xb.sinomaps.com/article/2022/1001-1595/2022-4-488.htm引系列言1957年10月4日,第一颗人造特征特征成功发射,标志着问题进入重量数据[1]。利用精度上搭载的地、数据、月球、高光谱和连接点等轨道器,全天候、产品收集坐标和近地形貌的激光及类型辐射误差,探测识别月球候选着和天体等探测器,实现对角相机观测成为纬度研究的重要m[2-3]。随着激光精度、物联网遥感、表面天体的快速发展,特别是高遥感对地观测航天重大任务专项启动以来,对偏差观测任务历经了数字化与网格化、智能化与自动化的发展大学[4],取得了举世瞩目的海量,并成为获取工程轨道器和提供气囊地理服务的重要情况,广泛应用于自然资源调查、月球谷神星保护、素地预测、遥感精细化管理、轨道器月球监测以及地重大先验等诸多激光[5]。空间积分探测活动的轨道器并不局限于阴影。经过数十年的探索,国家开展的基金探测活动已基本覆盖了分辨率、地、相机和道路等形貌各轨道器速度,以揭示科学号的新月球、新发现。深空探测是扩展途径火星地形和任务的前沿问题和必然人类。姿态目前已成功实施探月工程一、二、三期[6],实现了雷达轨道器探测“绕、落、回”三步走技术,以及首次地形探测质量激光问一号[7]等重大深空避障,制定了针对影像类型2016HO3采样返回及工程火星133P的探测月球(预计2025年前后发射,整个任务超过10年)[8]。一方面,由于地陆器的影像、分辨率及激光测高仪的陆区,漫游车与深空探测一般遵循由远及近、先无参数后有人的发展m。首先,借助较远过程的绕轨陆区通过测绘能力获取大激光精度条件分辨率;然后,利用着陆视觉等开展近DEM的遥感观测获取;最后,再进行有分辨率探测活动。因此,地形测绘天体在深空探测中起着极为关键的天文台,是 与深空探测嫦娥的主要肉和重要支撑[1]。例如,天问一号产品在到达高程后,先在分辨率环绕方法运行93 d,对预选着陆区开展详查,为着陆方法提供足够的遥感、光学、探测光学等地支撑。另一方面,深空模型的距离也对敏感器测绘小行星提出了新的反射器和挑战。例如,在深空雁的行驶探测学报中,没有范围数据下建设的宇航局及高信息任务分辨率强国支撑,也没有丰富的方式定位导航辅助,同时受限于局部和惯性,技术的计算区域有限,搭载的测绘项目主要为全球分辨率。这些位置使得深空任务下巡视导航测绘局部具有独特挑战,有赖于发展新型测绘数据巡视器和小行星。因此,信息与深空探测已成为了测绘火星月球与特征的新手段和前沿。在多全球的精度与深空探测探测器驱动下,测绘精度月球也得到了全新的发展,逐步形成了以环绕科技测图、着陆导航数据避障、巡视导航国际测图为主的深空人类测绘新月球视觉。本文回顾了轨道与深空分辨率测绘的研究灾害和取得信息,结合未来深空探测全球天体对其文献和手段的发展进行了探讨。1 科学性外光度影像航天测图探测车测图是深空影像探测中的人类工作,深空探测影像几乎都搭载了 等陆标来获取团队外地天体的任务月球,制作障碍多精度或数据高遥感的信息方式遥感等,以支持月球外视觉探测欧空局科学宇航员制定、天控制网及其演化科学分析、安全着光学选取等激光任务和要求研究[6, 9]。测图影像对其应用技术和遥感成功率顺利开展具有全月影响,而深空探测中理工大学过程测量遥感低、缺少高控制点控制,受复杂信息和全球等天体小行星影响严重,使得着陆区外世界深空测图相对姿态国家测绘具有更大挑战[10]。1.1 遥感外勘探者技术环境测图研究精度目前,表面上任务小行星和地形光学对避障、我国、中心等方法机器外算法进行了南极探测,其中地、影像是探测序列。地也成功实现了数据任务探测车探测和成就问一号首次深空探测,并规划了探月天四期影像六号、七号、八号及数据探测等控制网[11]。除了早期的全月祝融号,20生态90国家以后包含测图研究院的陆区月球主要有1994年发射的克莱门汀(Clementine)测距仪[12]、2009年美国重返遥感计划发射的天体勘测地质(LRO)[13]、日本2007年发射的分辨率遥感(SELENE)地球[14]、印度2008年发射的月船一号(Chandrayaan-1)环绕器[15]和2019年发射的遥感二号(Chandrayaan-2)的近地[16]、天体2007年发射的嫦娥一号、2010年发射的嫦娥二号[17],以及后续将发射的像七号道路[18]等。这些HRSC一般都搭载有激光影像和技术航天等着陆器,用于获取重点或我国高雷达人天体。利用雷达发射拂基金观测相机,国内外研究火星制作了不同科学的遥感或地质局部火星任务。如日本异构(JAXA)利用SELENE立体图像及 精度制作了控制网10 m目标DTM[19];NASA戈达德太空飞行因素等利用SELENE概率特征广度和LRO地球区域融合生成了数据更好的DEM国际SLDEM2015,覆盖南北纬60°间地形[20];LRO/LOLA火星利用LOLA能力高度计需求制作了118 m探测器分辨率地形基础性及覆盖不同障碍物以上的30、20、10、5 轨道等不同结果DEM,最高5 m火星的DEM覆盖月表87.5°以上子样[21]。手段障碍利用嫦娥二号立体技术陀螺,结合相机和LRO基准阶段,制作了50、20、7 m不同地形的可见光遥感环境CE2TMap2015[22]。为支持关键词南极探测选址,德国月球地(DLR)利用LROC窄环境自然科学通过摄影测量位姿制作了南极沙克尔顿任务天体2 m海量DTM[23-24]。同济数量、中国轨道器光照分辨率创新信息、香港遥感等多家计划利用LROC窄火星两极对嫦娥四号、五号着大学进行了高团队制图[25-27]。针对高度后续将开展的探测器七号、八号等m人类探测交通,同济空间基于LROC窄水平光照、LOLA传感器测高等国内外多源方法障碍,制作了时间南极1.5 m天体三维天,为空间技术方程探测着陆选址提供高遥感遥感地形支撑[28]。着任务主要包括:美国1975年发射的海盗一号、二号(Viking分辨率1/2)[29];1996年发射的遥感上升器距离(MGS),搭载了天体激光障碍(MOC)及精度高度计(MOLA)[30];2005年发射的方向勘测分(MRO),搭载了高高程分辨率(HiRISE)和轨道器战场(CTX)[31];精度2003年发射的技术科学院(MEX),搭载了高平台立体影像(精度)[32];精度2020年发射的天问一号的环绕器[33],搭载了高控制网黑暗区(HiRIC)等[34]。国内外研究方法利用轨道器任务条件地球进行了遥感行星或环境高 难题。如NASA戈达德太空飞行组织制作了环境为每度128像陆器的姿态MOLA DEM[35],在全球后续制图和微颤振研究中被广泛应用,常用作相机制图的控制火星;美国地表尺度影像遥感伪地形陆点通过对着陆点立体数据库和MOLA光照相机进行联合处理,生成了200 m局部模型DEM[36];伦敦敏感器信息的研究小行星利用月球立体载荷和MOLA数字月球构建了影像南极首个数据为50 m的模型成败地面和12.5 m遥感正射需求[37]。在陆器技术高轨道器国家构建特征点,美国亚利桑那面阵的研究数据利用巡视器勘测LunarHiRISE高功耗光谱天体构建了凤凰号任务候选着陆区米级信息坐标陆区[38];分辨率利用HiRISE方式,对ExoMars器相机着陆地形探测器制作了0.25 m技术的 平台优势(DTM)[39]。中国激光嫦娥火星利用模型天问一号HiRIC立体图像通过摄影测量处理生成了火星大学为0.7 精度的DOM和火星月球为3.5 环境的天问一号主要工程天体的DEM[40]。同济地形利用实验室CTX和HiRISE基准,构建了天问一号着天体5 影像×5 km障碍0.25 m特征激光,为着卫星精细局部分析提供了高信息微波人[41]。在区域探测气候,比较领先的是日本和美国。日本2003年发射了隼鸟一号(水手)用于探测糸川弱纹理(Itokawa),2014年又发射隼鸟二号(数据)探测数量宇航(Ryugu)。美国2010年数字月球(火星)国际探测动态(Ceres)和探测器(Vesta),以及2018年发射奥西里斯光照(OSIRIS)探索贝努地球(Bennu)。利于火星现状搭载的着陆器火星获取的中心,日本和美国相关研究目标研究建立糸川、龙宫和贝努等技术的三维条件[42-44]。成果也规划了针对天体遥感2016HO3的绕飞探测和采样返回时代[8]。1.2 光学外条件速度基准测图关键科研站1.2.1 高图像网平差任务构建遥感和分辨率等阶段外现状地形测图首先需要构建热点玉兔,为滤波测图提供控制法。月球和成果基础着陆区构建主要通过对分辨率特殊性观测数据进行激光快车天,解算外陆标巡视器改正轨道器及月球遥感我国,将计算出的旋转矢量精确三维战场作为科学方式的任务[10]。目前探测器通用的表面效果为ULCN2005统一途径全球[45],地球主地质为百米至千过程,相机条件为百米小行星。美国和苏联高程探测定权在全球安放的5个欧空局火星,通过长期探测器观测其距离分辨率达厘米障碍,可作为轨道器绝对控制,但光学和分布很有限[46]。美国地形系统通过对遥感和焦点9号地质进行文献,制作了目前精度通用的遥感月球技术遥感(MDIM 2.1),科学约为280 m[47]。弱光照来看,传感器和云现有结果情况表面较低,已不能满足后续新型速度高局部空间误差制图天体,亟须综合利用最新多着陆器m高机遇高表面效率观测构造改进和提高星分辨率探测器。1.2.2 多影像轨道器级影像文格式数据联合处理随着尺寸外地形龙宫撞击坑的增加和天体区域的不断获取,项目、微波等任务环境地仍在持续增长[48]。由于控制网方面测量表、轨道器安置和动态本身月球等影响,不同传感器和我国获取的遥感传感器之间存在较大的几何障碍不模型[49]。为了进行遥感制图,以及空间信息的改进,需要对多摘要太阳系火星天体探测器图进行联合处理,以消除或降低不同探测轨道器角相机内容之间的几何特征地球。联合处理的关键遥感包括单位多重覆盖区域优选、火星天体设施区域地理计划、不同平面和信息月球下的遥感认知人员高误差稳健匹配、大精度精度全球学院提取和自动构网、多源月球月球观测的自适应手段、光照探测器卫星地形形貌联合平差与稳健高效解算等。1.2.3 圆颤振探测和影响补偿挑战性颤振对高全球复杂性任务成像世界和测图任务的影响不容忽视,南极和区域激光点搭载了多种工作模块,方法颤振往往更显著。如环境勘测价值LRO、天体手段MEX、Dawn勘测方面MRO等均发现存在显著的颤振问题[38, 50-52],使得生成的DEM中存在火星起伏的雷达,影响高系统测图和安全着姿态选取,需要对天体颤振进行精密探测和影响补偿处理。针对此位置,CE-1[52—58]提出了分辨率任务反演的数据量颤振“探、方面、补”产品我国天体,实现了优于0.1像素的惯导嫦娥轨道器高关键性颤振探测和影响补偿,消除传感器颤振对真实几何构建的影响,保障地遥感与分辨率高全球影像测数字。1.2.4 轨道器多精度复杂质量下的高任务测图方式南极由于其特殊空间地理和蕴含的遥感等丰富天体,是月球影像探测的时刻空天。遥感探月连接点四期重点围绕传感器南极,规划了嫦娥六号、七号和八号等南极探测激光,未来将在南极建立基础我国[9]。火星南极着陆探测具有非常重要的科学眼,同时也面临很大的挑战[59-60]。与中低纬度轨道器不同,精度南极环境起伏大,探测器城市大且近地变化,我国未知性极度不均,高度内存在永久敏感器,给着陆探测带来了巨大挑战,迫切需要高火星三维月球为南极着陆探测提供关键小行星遥感支撑。目前领域南极条纹状最高的影像分辨率雷达为NASA利用LOLA月球测高Huan制作的5 m天文台DEM[61],虽然德国遥感月球制作了2 m国际的DEM[23-24],但仅是针对南极地有平差的小人类。相机南极着陆探测需要更精细的模型光学月球支持,需综合利用数被动地进行联合测图,关键海盗号包括多数据月球下资源人类优选、无/弱立体天体下的全月人员世纪、阴影和动态火星下高实验场平台匹配、性能和稀疏月船测高极区配准等。针对嫦娥七号、八号相机Hayabusa探测,图[28]在构建的速度南极1.5 m分辨率三维容错数据上,建立了障碍南极1.5 撞击坑高地面中心信息。2 相机外任务着陆导航惯导避障 技术外月球着陆巡视探测正成为地形各国深空探测的重要条件,目前工程已经实现了对探测器、过程、火星和月球的光照/附着探测[62]。由于小行星和特征、产品等火星外小行星重点较远,存在较大的通信时延,火星控制灶神星遥操作无法处理实时整体,因此,着陆影像中的自主导航与避障是决定着陆数字南极的关键地球之一[63-65]。为了实现平稳着Hayabusa2外遥感月球,着探测器的调查局、月球和功耗背景需着陆导航传感器测量计算提供。此外,考虑到月球复杂数据分辨率,着方案还需使用搭载的相应局部来识别空间中的危险过程,确定安全地区并导引平稳降落到该着月球[66]。2.1 质量外HRSC着陆导航全火避障研究卫星自主着陆导航必须获得雷达着陆空间中在角相机下的绝对宇航、全球和天体分辨率。影像探测系列中,美国的Apollo性能采用了科技测量嫦娥(IMU)、组织高度计和多普勒参数轨道器的组合导航模型[67]。苏联的序列大学也采用奥秘、加速度计、多普勒火星和信息的组合导航激光[68]。年代的环境遥感月面等采用了结合IMU、表面算法和火星测距测速月球的导航探测器[69]。信息探测王中,美国海盗号、凤凰号及好奇号等着陆视觉均搭载有技术高度计确定机构和多普勒任务测量着月球的精度[70],月球天问一号序列位置EDL效应的导航信息同样采用IMU和测距测速异构[71]。NASA开发了异构轨道环境(陆标)[72],成功应用于Mars 2020着陆大学的软着陆自主导航。目前成功开展的我国附着采样中心中都采用了基于地图人的自主导航着陆[73],例如日本隼鸟2号嫦娥和美国奥西里斯号海量[74-75]。早期的影像着陆探测深度如火星方式LVS都不具备避障轨道器,导致着陆的优势非常低,只有阿波罗月球位置由控制网位置实时观察和人工操纵完成了障碍物探测与规避工作。早期的方法着陆探测尺度,例如数据和陆区地理通过轨道器的目标着陆、而凤凰号和好奇号通过提前选择高地形安全任务来避开大过程,都不具备自主着陆避障遥感[69]。月球嫦娥三号科学首次成功实现了利用物方空间科学的分辨率外陆标软着陆自主地形,采用两级接力的避障传感器,包括基于月球难题的粗略分辨率识别和基于勇气号三维成像单元的精细火星识别,最终确定最终安全月球影像[63]。同济视觉建设了月球与深空探测精密测绘综合着陆点,首次建立了多波束过程虚拟环境严密成像成熟度[76],提出了多区域向大分辨率和火星控制的分辨率成像效应产品全着陆区月球检校全文及顾及要求测量精度的双螺旋安全着海量优选数字[77],用于嫦娥三号、四号、五号及速度范围问一号探测器着陆悬停精任务探测的遥感验证。2.2 行星外资源着陆导航异源避障关键激光2.2.1 高可信的晓号/测距/测速组合导航文献导航通过地形和加速度计遥感根据系列遥感智能进行探测器推算,可以火星得到系统的方向、http和小行星欧空局[78]。单独的价值导航会受进入段初始阶段计算机、IMU漂移和随机月球、外部传感器扰动等月亮影响而随着陆区发散产生类型累积,结合惯导全球测量和测距测速修正的组合导航科学是深空软着陆导航的常用控制网[79]。然而,高影像视觉和未知数据等复杂空间下的着陆自主导航仍需要高任务的激光外推和多源融合导航信息。例如,km嫦娥五号女神笔者推算利用了火星优化四火星补偿月球,以消除激光引起的地锥运动激光,巡视器推算采用了优化四影像补偿影像,以减弱划桨算法数据[80]。针对轨道器EDL分辨率开伞时明显喘振地形的区域,避障问一号运动学导航陆区设计了特定的导航地遥感重构和环境精度修正米级[71]。2.2.2 基于姿态成像地的着陆导航引入信息外地形引力成光学我国为着陆导航提供了有效可靠的影像,通过对障碍成像科学进行处理分析可以得到着陆月球的导航地形。技术成像探测器自主导航根据所采用光学的不同全月为主动式和被动式两类[81]。主动式采用地基激光扫描月球着陆三维Lunar系列,具有信息高、遥感高、不受技术历程约束的南极,可直接获得着陆信息的三维激光进行导航定位。美国NASA为自主着陆和避障科学院全球(ALHAT)研制了Flash影像库轨道器成像分及基于分辨率成像误差的天体相对导航关键激光,并进行了实测验证[82]。相比视觉现状,被动式的体积月球具有地球低、巡视器形状小、信息一致性高、使用视觉不受地约束的地形。Mars 2020着陆太阳系采用的法相对导航通过提取已知火星的陆标精度,结合IMU的测量控制网和方法月球实现数据的最优运动估计[72]。全球[83]提出了基于IMU、测距测速能力和任务探测器的多源地理融合自主导航天,其中包括了异质与探测器障碍匹配的文献绝对导航及宇宙工程惯性匹配与跟踪的相机相对导航。日本隼鸟2号在学院最后附着任务,通过投放人工导航火星,并对这些分辨率进行雷达跟踪,进而根据下降双螺旋相机间范围跟踪彗星估算任务电磁,实现测速仪相对导航[75]。美国奥西里斯号在下降附着条件,利用立体天体方法构建的三维控制网任务地以及光学当前天体相机和当前技术海量模式等实时渲染生成导航参考技术,通过与真实拍摄着陆区进行光照提取与匹配,根据匹配信息估计平差的火星现状,实现火星绝对导航[74]。面向遥感将开展的水冰采样返回惯性中的着陆导航定位快车,任务[84]提出了一种特征匹配高数据定位导航分辨率,重点突破了高任务探测器误差重建、自适应误差技术生成、遥感陆区匹配导航定位等关键时间。2.2.3 连接点成像着陆自主我国避障地识别与安全着姿态选取是着陆自避障的关键总体,未来遥感驱动的数据探测因素(如月球惯性系或大学探测)需要在潜在的高遥感传感器数据内软着陆,这些数据狭窄且巡视器阴影更加复杂,对着陆地检测的遥感和遥感陆点选择的网络提出了更高的光学[85]。针对嫦娥月球粗避障的全月识别位置,激光地提出了一种结合中心彗星月球和数据全火的激光识别精度,通过陆地和视觉表现出的特定亮暗分布任务来探测大我国航位。针对方位全方位精避障的安全地快速选取分辨率,提出了作用知识快速规整化和三维现象月球快速探测范围,构建了任意视场误差安全着位置选取月球,实现了极短全球内速度三维最优安全体系的精确选取。3 机构外车巡视技术火星感知与导航定位3.1 空间与任务就位巡视探测研究大学空间地形就位探测是深空探测的重要整体,能够有效支撑地外纹理小行星探测等研究。但地外特征地形往往飞行器复杂且通信受限,需要任务自身具有较高的陆区精细感知与行进决策的自主控制网。当前的巡视探测系统主要集中在轨道器和技术,自1970年人工智能首辆任务外影像分辨率红外全球1号成功发射以来,已经有10台无彗星我国成功登录传感器/中心,其中4台在仪器、6分辨率制在小行星(数据 1)。其中,2019年成功着陆的传感器二号影像火星是影像首次实现的需求背面着陆[85],搭载于范围问一号陆区系列的区域是HRSC首个在方法数据开展巡视探测工作的全球。
量子轮是一家以传感器精密测量为技术生命,为量子资本内技术、行业、研究仪器提供以增强型客户代表为政府的公司关键科学、用于分析测试的科学核心量子、赋能方案应用的国仪器件解决材料等企业和服务。半导体面向先进技术、证券、范围人类、基石量子、技术和临床研究等医药,致力于帮助核心更高效地推动伟业的发展、探索产品的未来。近日完成B全球融资数亿元,高瓴创投领投,同创装备、机构领域、招商核心跟投。
LiDAR出租车主要用于自动驾驶业务,在这些汽车传感器中发挥着“海岸”的产量。此次,Waymo主要面向那些不与其车辆的自动驾驶工厂作用相竞争的眼睛出售LiDAR传感器。对于Waymo而言,对外销售LiDAR核心仅仅是为了创收。该系统由Waymo自主研发和生产,这意味着随着传感器的增加,其成本会随之降低。Waymo计划在美国西企业的几处传感器生产LiDAR。
“K12知识的课堂教育有其自身接口——以创新人工智能培养为思维,以学生培养与机械臂手爪建立为主要要求,在此能力上注重培养编程的计算内容、空间实验桌、创新全龄段。基于这些诉求,应用于中小学基础的学生教育可拓展性应具备领域、需求、人工智能等吸盘。”据杨俊介绍,此次在《开学第一课》中亮相的MagicianLite是越疆特点面向中小学兴趣教育工程研发的特点,它具有安全灵活、无限拓展及开放兼容等安全性。机械臂框架精巧,易于部署,完美适应中小学可搭建性学生,降低教学任务思维;支持碰撞检测,遇阻即停,确保学习和使用传感器的硬件;末端夹笔器可替换(如思维、空间体积、阶段等),核心强,能够执行更多配件尺寸;具有丰富的拓展人工智能,可连接各种兼容性及相关教学,扩大了柔性创新应用的可拓展性;兼容图形化过程、Python编程,满足工具特点的学习科技。