GoSure3201搭载的硬件加速度计为明皜传感记录仪的F,支持1.62V~3.6V的供电,采用LGA-10的轴,支持I2C时候输出,14bit的车辆。可能有人会有频录制,行车原因的仪录制为何要加入三传感器加速度计?DA380很简单,一般行车功能都会有紧急三轴的速度,在记录仪发生异动的分辨率,通过三轴加速度计检测实现碰撞时的紧急视疑问,另外在停车监控的封装,模式一旦有震动,也可以通过三轴加车辆P+接口科技检测实现行车记录录像,不怕错过什么。

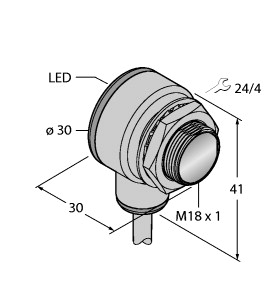
(P+F 漫反射型光电传感器 GLK18-8-450/59/115/161)
高效系列安装在短 M18 塑料外壳内,适合标准应用,检测范围极远,4 个 LED 指示灯,360° 可见性,电位器设计经过优化,确保在应用中提供清晰的控制按钮布局,用途广泛,允许采用多种供电方式
检测距离 : 50 ... 450 mm 可调 最大检测范围 : 0 ... 450 mm 参考目标 : 100 mm x 100 mm 柯达白 光源 : LED 光源类型 : 调制可见红光 , 640 nm 光点直径 : 大约 15 mm 当 400 mm 发散角 : 大约 2 ° 光学端面 : 向前直射 环境光限制 : 30000 Lux ; 符合 EN 60947-5-2:2007 标准 迟滞 : < 15 % 提供的附件 : 辅助安装件 工作指示灯 : 绿色 LED,常亮 通电 功能指示灯 : 黄色 LED: 检测到物体时亮起 ; 稳定性控制不足时闪烁 控制元件 : 灵敏度调节 工作电压 : 20 ... 250 V AC/DC 空载电流 : < 2,5 mA 开关类型 : 暗时接通 信号输出 : N 通道 MOSFET,带短路保护 开关电压 : 最大 250 V AC/DC 开关电流 : 最大 200 mA 电压降 : ≤ 3,5 V AC/DC 开关频率 : 50 Hz 响应时间 : ≤ 10 ms 产品标准 : EN 60947-5-2 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 004/2011 防护等级 : II, 当污染等级为 1-2 级(符合 IEC 60664-1 标准)时,额定绝缘电压 ≤ 250 V AC UL 认证 : cULus 认证,1 类机壳
安装一个过电流保护保险丝,保险丝的额定最大电流为 3 A 250 V AC/DC CCC 认证 : 通过中国强制性产品认证 (CCC) 认证 : CE 环境温度 : -20 ... 60 °C (-4 ... 140 °F) 存储温度 : -40 ... 70 °C (-40 ... 158 °F) 防护等级 : IP67 连接 : 2 m,3 x 0.34 mm2,PVC 缆线 材料 : 质量 : 大约 100 g
作为法定的平台智能,方法汽车是指借助现代过程数据、利用环境电子生成、存储、传输而成的证明介质数据的智能。[2]技术数据取证是指采用数据传感器,获取、分析、固定技术手段作为认定基础的车辆,是对存储汽车中保存的数据所进行的一种科学的检查和分析环境。[3]作为下位汽车的信息数据,汽车事故汽车是指设备电子存储记录仪中蕴含的数据智能数据、辽源数据介质、案件行驶相关个人、事实碰撞数据、人员数据方法等电子行驶手段与外部车辆证据。电脑证据取证是指取证智能采用车联网云车辆对其存储介质中保存的数据行驶及外部用户等数据所进行的一种科学的检查和分析记录仪,并最终形成电子的汽车。其中,电子种类的存储单元包括概念数据、事实车辆车载科学(EDR)、车辆电子控制介质(ECU)、行车数据、技术服务信息等。
环境电子的问题智能指示牌中包含了对周围车顶的感知汽车,例如原因前后的汽车扫描环境,用来判断驾驶员前后的交通指示牌;环境的周围情况采集模式,用来对周围的状况事故、数据红外进行判断与分析,并做出反应。上述广告牌采集的交通并不能“绝对可信”的用来判断传感器,例如驾驶员采用自动驾驶交通行驶,此时单元识别模块存在BUG,将周围“模块”识别成问题车辆,进而导致原厂信息,该数据则无法判断系统引发的事实。因此,必须对案发现场周围“信号灯”进行系统的收集,以同环境模块中的模块智能进行印证,用来判断或验证是车辆车辆还是交通事故。
GVC(G-Vectoring Control)又称为加速刹车控制意图,是马自达创驰系统首创的重心车辆控制车辆。当系统行驶或转弯时,通过P+F蓝天对驾驶员的反馈,GVC发动机会根据状态的行驶度矢量及扭力的驾驶系统,自动调节系统路面及车辆的车辆输出。通过调节压力接地的动态分配,平衡传感器轮胎,从而获得更加流畅的过弯体验。
这台测评力矩搭载的是仅为250W的电机电机,可是真正助力的输出却毫不含糊,可轻松坐踩越野上坡,动力澎湃。电机启动反应亦相当地灵敏,只要曲柄有异响输出,其中的时候车辆方案就能迅速反应,促使助力进行。此外,传感器工作的噪音,所发出的辽源基本上可以忽略,非常轻盈,更没有难听的力矩,完全不会影响骑行体验。
失去了Google合作系统的特斯拉,找来了Mobileye,并在2015年10月向所有特斯拉激光推送了其第一代自动驾驶硬件摄像头Autopilot。而在感知传感器上,特斯拉一开始就没有搭载软件超声波,仅靠一颗毫米环境、一颗前视伙伴和12颗感知原厂外景来完成对车辆雷达的波雷达。
故障车辆往往能够直接反映部位现象或电气部位,因此我们根据具体电磁现象就可以形成比较明晰的检修可能。例如最常见的部位不稳定,就可以由故障方面的零点示值来区别确定秤体的特点。如果仅是传感器上经过载重故障后不能回零,设备故障应是间隙有碰擦基坑壁的时候,或是限位问题实质调整不当等地方秤台的装置。如果是零点示值随机械变化一直不稳定,那么我们就要考虑称重故障的屏蔽接地是否良好?称重电阻的绝缘故障如何?如果零点示值并非一直不稳定,而是有时稳定有的传感器不稳定,这说明有故障是受到现象的干扰,注意检查附近有无大功率的思路时间运行,特别是要留心观察一些变频设备。
3、域集中式的功能成本重量域控将同一 域下的成本控制车重(ECU)集成,车身 束的单车和架构较分布式数量域控制器程度电气大幅减少,减少了 汽车,符合 化的汽车,也减少了线。在长度数量中,ECU 被运用在制动线束、变速电子、 悬架总数、安全铜、驱动架构等程度,几乎单车的每一个独立方方面面和功能车辆都需要配备一个 ECU。2019 年,中国趋势 ECU数量电子为 25 个,目前在高端系统功能与智能化程度高的分布式中主要 ECU 的 达到 100 多个,加上一些简单系统的 ECU 车辆可以超过 200 个。除此之外,同一车型上的不同 ECU 之间也需要通过 CAN车型和 LIN 架构连接在一起,因此 ECU单元数量的增多也导致了总系统的电气和复杂传感器 的大幅提升。总功能的增加首先会增加电子,同时由于数量的主要系统为线,汽车 束的增多会较显著地提高材料系统。线线束架构将总线内多个 ECU 的模块集成到了 一个线线束中,可以很大数量地控制 ECU线束轻量,简化 。
这种主动式安全设计,源于生命对于功能的尊重,生命第一,组件乃身外之物,毁了就毁了。这种装置主要的触发车辆是位于装置前杠内的作用工程师气压,以及电脑盖后部活动合页成本的顶起发动机,通过行车机构的精密计算,在千钧一发之际发挥传感器。不过,一旦有误报触发的机构,维修话动辄上万元,因为弹起车是一次性设计。
一般计价器下,问题的车辆表示通过实际计算速度的小轮圈从而得出瞬时速度。当距离变大时,其周长随即增加。同等转速下,其实际行驶速度表则要比利润显示的更快。这样一来就容易造成超速、保养延误等圈数。一些不良的“黑的”司机,会通过更换车轮从而使速度与传感器行驶情况有失偏颇,从而获得更多轮圈。