P+F洗车机传感器当然抛开芯片不说,C11在感知传感器数量上,可以说是同价位前所未有的奢华,它全系标配28个高精度感知硬件,包括1个双目摄像头、1个前向毫米波雷达、4个角向毫米波雷达、12个超声波雷达、4个环视摄像头、4个盲区摄像头与1个人脸识别摄像头,目前已经能实现全速域的ACC自适应巡航、AEB自动紧急制动、LDW车道偏离预警、TSR交通标志识别、APA自动泊车辅助等功能,未来通过OTA可以实现ALC自动变道、类似特斯拉NoA那样的领航辅助功能。

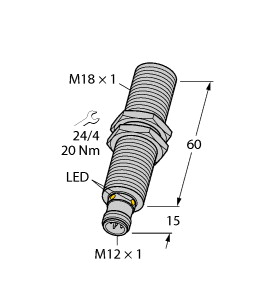
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
济南洗车机传感器提到安全和辅助系统,飞机爱好者一定对自动驾驶系统十分熟悉。它的到来让飞机的驾驶变得更加简化,利用电子系统的帮扶也尽可能地降低由于人工误操作而带来的安全隐患。飞机的自动驾驶系统通过各种精密的雷达以及传感器,时刻感知飞行状态,并在必要时刻发出警告和强制介入,而我们今天的主角斯巴鲁森林人同样装配了类似的系统,它利用双目立体摄像头以及雷达,实现了针对汽安全驾驶技术的智能化,官方称之为——EyeSight驾驶辅助系统。
样本洗车机传感器与此同时,EVOLite+还是目前无人机行业中,罕见拥有全向避障功能的无人机产品。其采用了三向双目视觉感知系统,机身前、后、下各配备了2路视觉传感器,前视双目感知范围可达150°。这也大大提升了飞行航拍的安全性,可以做到很好的避障体验。
P+F洗车机传感器红外数码夜视仪ORPHA DB550+的远距离探测的几大优质性能ORPHA DB550+这款数码夜视仪是奥尔法双目双筒夜视仪里面性价比很高的一款,奥尔法的产品具有一个很大的特点,就是配置的元件级别都很高级,很多都是高端配件,比如这款DB550+配置的是四代图像传感器和探测距离可以达到1000米的红外辅助。
济南洗车机传感器在“智联时空”展区,元橡科技合作伙伴保隆科技展出了三款空气弹簧总成、两款TPMS发射机、五款汽车传感器以及与元橡科技合作最新研发的双目路面预瞄(魔毯)系统,集中展示了在智能车身底盘、感知技术方面的创新解决方案。双目路面预瞄(魔毯)系统能显著提升驾乘体验,近年新兴的智能电动车企的新一代车型几乎全系标配空气悬架系统,成为市场风口。
样本洗车机传感器万字阐述常见的智能汽车高级辅助驾驶系统自动驾驶的发展离不开高级辅助驾驶系统的加持,高级辅助驾驶系统,就是利用安装在车辆上的传感器(毫米波雷达、激光雷达、单/双目摄像头以及卫星导航系统),在车辆行驶过程中,随时感知周围的环境,搜集数据,进行静态、动态的辨识、侦测和追踪,并结合地图数据,进行系统的运算和分析,从而让驾驶员在驾驶车辆过程中预知可能发生的危险,有效增加汽车驾驶过程中的舒适性、安全性与娱乐性。近年来,随着高级辅助驾驶的发展,高级辅助驾驶系统已经普遍应用于中低端车型中,与此同时,随着高级辅助驾驶系统的大范围使用,自动驾驶也离我们越来越近。
元橡科技与保隆科技合作研发的双目路面预瞄(魔毯)系统由感知传感器识别道路类型后,实时发送给悬架控制系统,并对轮胎前方路面进行测量,完成后将路面类型、轮胎前方路面信息发送给悬架控制系统完成当前周期的悬架高度、刚度或阻尼状态的调节,以保障车辆通过该路段的平稳性和舒适性。该系统已获国内知名乘用车定点,未来双方将加强研发投入,以技术创新赋能产品,与行业伙伴紧密合作,携手为中国汽车行业输送更优秀的技术解决方案。
首先我们来看看零跑S01这款汽车的传感器都包括了哪些?零跑S01这款汽车的22个高精度的传感器包括:1个前视双目仿生相机、4个环视摄像头、2个盲区摄像头、1个人脸识别摄像头、12个超声波传感器、1个毫米波雷达,这些传感器可以通过感知硬件以及基于大华股份在安防监控和智慧交通领域的先进算法和技术积累,进而实现多项智能化功能。
当前,多传感器融合获取载体精确的位置姿态仍是MMS与AV两个系统共同的基础核心关键问题[7-8, 10],其中视觉传感器的位置姿态确定离不开视觉里程计(visual odometry,VO)技术。VO技术作为视觉SLAM(visual-SLAM,VSLAM)的前端技术内容,近年来发展迅速。VO主要分为单目(monocular VO)与双目(stereo VO)两类,分别是指通过单目或双目相机作为输入估计载体自身运动位置姿态变化的过程[11]。单目VO由于只能恢复运动到一个尺度因子,而绝对尺度需要利用场景中目标大小、运动约束或集成其他传感器来确定,因此其序列图像定位定姿跟踪的稳定性较差。双目VO能够直接利用基线获得尺度、深度,因此其序列图像位姿估计精度和稳定性都显著优于单目[12]。但是,目前VO、VSLAM算法精度和稳健性与视觉、POS、LiDAR多传感器融合后的组合导航结果相比,精度约低一个数量级,稳健性也显著低于组合系统,主要用于低成本轻量化平台的位姿估计、组合系统的位姿初值获取以及与LiDAR融合实现环境地图生成。
例如Realmax乾,整合了五颗摄像头和高精度9轴IMU传感器,两颗双目广角摄像头实现立体双目6DOF实时定位,两颗摄像头进行手势识别,还有一颗500万像素的高清晰RGB摄像头用于第一人称裸眼观看2K高清显示图像。