P+F洗车机传感器ADAS 作为实现自动驾驶的基础,拥有主动判断和预防措施功能。ADAS 指高级驾 驶辅助系统(Advanced Driving Assistance System),是实现自动驾驶汽车的基础。此 系统利用安装在车上各式各样的传感器(毫米波雷达、激光雷达、单双目摄像头以 及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动 态物体的辨识、侦测与追踪,并结合导航地图数据,进行系统的运算与分析,从而 预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。即出 现紧急情况时,汽车自动智能的在驾驶员主观反应之前做出主动判断和预防措施, 来达到预防和辅助的作用。

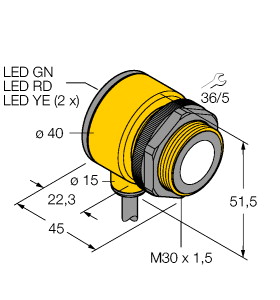
(P+F 超声波传感器 UC4000-30GM-IUEP-IO-V15)
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,开关输出和模拟量输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS
15 ... 30 V 输出电压 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 1 路推挽(4 合 1)输出,短路保护,反极性保护
电流输出 4 mA ...20 mA 或
电压输出 0 V ...10 V 可配置 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 分辨率 : 电流输出:评估范围 [mm]/3200,但 ≥ 0.35 mm
电压输出:评估范围 [mm]/4000,但 ≥ 0.35 mm
特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 负载阻抗 : 电流输出: ≤ 300 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出模式: 窗口 模式
输出特性: 常开触点 输出 2 : 近极限: 500 mm
远极限: 2000 mm
输出模式: 上升斜坡
输出特性: 电流输出 4 mA ...20 mA 光束宽度 : 宽
聊城洗车机传感器用摄像头代替人眼对目标(车辆、行人、交通标志)进行识别、跟踪和测量,感知到汽车周边的障碍物以及可驾驶区域,理解道路标志的语义,从而对当下的驾驶场景进行完整描述。摄像头必须先识别再测距,如果无法识别则无法测距。相对于其它传感器,摄像头的价格相对低廉,有着识别车道线、车辆等物体的基础能力,在汽车高级辅助驾驶市场已被规模使用。依据不同的图像检测原理,可分为单目摄像头和双目摄像头,根据芯片类型又可分为 CCD 摄像头和 CMOS 摄像头,等等。其优点在于摄像头是目前唯一能够辨别物体的传感器。
样本洗车机传感器 本次展出的INDEMIND双目视觉惯性模组是为解决终端视觉感知需求而专门研发,采用“视觉+IMU”传感器融合架构,内置INDEMIND自主研发的高精度Vi-SLAM算法、图像识别算法,无视复杂光环境,无论室内室外皆为终端设备提供稳定的高精度导航与定位、高精度语义地图、智能避障、物体识别、三维感知功能,让智能终端拥有感知与认知世界的能力。
P+F洗车机传感器随着这些游戏引擎的发展,就可以极大程度的获得高度逼真的仿真场景。在无人机领域我们可以模拟一架无人机在一个场景里面飞行,在影像效果里面我们可以模拟不同光源条件下,测试无人机视觉相关的功能,比如模拟双目VIO,双目避障,光流等在室外光源,黑暗场景等情况的算法表现和特性。在物理碰撞探测系统中,我们可以构建障碍物场景,遮挡场景对GPS信号的影响,来模拟多传感器融合的场景。
聊城洗车机传感器据介绍,NIO Air AR Glasses眼镜可实现等效4米、130英寸的3D观影效果,同时也是全球唯一一款具备车载防抖功能的AR眼镜。AR眼镜是蔚来全景数字座舱 PanoCinema 重要组成部分。NIO Air AR Glasses由蔚来与蔚来资本参与投资的创新AR设备企业 Nreal 联合开发,支持双目1080P 3D显示及108% sRGB色域覆盖,配合7.1.4沉浸声音响系统与杜比全景声技术,为用户提供全感官沉浸体验。基于眼镜及座舱传感器的多模态感知融合,蔚来与Nreal联合开发的防抖防眩晕技术可在车辆动态行驶过程中为用户提供舒适的观影体验。
样本洗车机传感器 与此同时,INDEMIND与国际领先的视觉影像技术开发公司Omnivision合作,联合开发了双目摄像头及IMU传感器时间同步解决方案,控制时间同步精度至微妙级,极大提高了传感器间时间同步精度,成功将视觉传感器的慢速运动高精度与IMU的大量程和短时间高精度相结合,保障数据前端获取精度。
首先我们来看看零跑S01这款汽车的传感器都包括了哪些?零跑S01这款汽车的22个高精度的传感器包括:1个前视双目仿生相机、4个环视摄像头、2个盲区摄像头、1个人脸识别摄像头、12个超声波传感器、1个毫米波雷达,这些传感器可以通过感知硬件以及基于大华股份在安防监控和智慧交通领域的先进算法和技术积累,进而实现多项智能化功能。
据了解,星火科技公司核心技术人员均来自于美国伯克利国家实验室,公司智能清扫车采用以双目为核心,多重传感器融合的视觉主导感知方案,所有核心软件算法底层原始开发,不依赖任何第三方软件包,致力于提供整套无人驾驶解决方案,并针对特定应用场景,打造完备的产品功能体系,可无缝对接工业链条快速落地。星火科技董事长许德中补充道,正是依托领先的双目视觉技术,智能清扫车才得以在没有信号的条件下完成自动清扫作业。
智能车辆的传感器可以分为视觉传感器、定位传感器、雷达传感器、听觉传感器和姿态传感器。其中视觉传感器可以分为单目摄像头、双目摄像头、夜视红外摄像头;定位传感器可以分为惯性导航系统、卫星导航系统(GNSS)、高精度地图、实时动态(RTK)差分系统;雷达传感器可以分为激光雷达和毫米波雷达;听觉传感器可以分为语音识别、声音定位入口;姿态传感器可以分为车载诊断系统(OBD)、CAN 总线、惯性测量单元(IMU)、发动机等汽车工况传感器。主要的传感器为激光雷达、毫米波雷达、摄像头、超声波雷达、GNSS 辅助传感器,其中 GNSS 辅助传感器包括惯性导航系统和 RTK 差分系统。
一般传感器需要接触肢体,人不可能随便在肢体上放置传感器,大大限制了应用场景。利用摄像头跟踪手势动作则解放了肢体,通过单目或双目摄像头获取手势图像序列,对图像序列进行一系列处理,分割出手势区域并获取手势的基本信息,最后将其与预先训练好的手势信息进行特征匹配,达到手势识别的目的。