P+F洗车机传感器二氧化锆式氧传感器的异常工作,都会在ECU中存储故障码。因此,通过专用解码器或通用解码器,可以查出二氧化锆式氧传感器的故障码00525——二氧化锆式氧传感器G39、G130无信号,或二氧化锆式氧传感器G39、G130对正极短路,也可通过读取数据流来判断二氧化锆式氧传感器是否有故障。如果二氧化锆式氧传感器示数长时间停滞在一个数值不变或变化缓慢,则说明二氧化锆式氧传感器有故障。

(P+F 超声波传感器 UC4000-30GM-2EP-IO-V15)
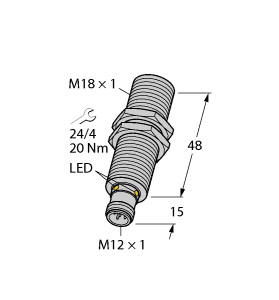
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,2 路可编程的开关输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 2 路推挽式(4 合 1)输出,短路保护,反极性保护 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出功能: 窗口 模式
输出特性: 常开触点 输出 2 : 近开关点: 500 mm
远端开关点: 2000 mm
输出功能: 窗口 模式
输出特性: 常开触点 光束宽度 : 宽
泰安洗车机传感器每端口32字节的过程数据量只是最先进的IO-Link连接型传感器和执行器的最大值;实际上,像开关这样的较简单IO-Link次设备数据宽度可能只有一个位。当应用的设置数据宽度不足时,有些IO-Link主设备会允许分段进行过程数据传输。IO-Link的其它数据容量扩充方案包括使用多个引脚4导体进行双向IO-Link和开关通信,以及对引脚4 IO-Link数据进行并行双通道数据传输。对于后者,引脚2导体可承载设备特定I/O或开关信号(尽管通常不与状态监控相关),并空出IO-Link通道以承载补充信号。这种IO-Link双通信数据传输可实现实时通信,而无与远程PLC(包括周期时间)有关的延迟,反过来支持需要立即对机器或设备状况进行分析并做出响应的应用。
订货洗车机传感器最主要是因为比别人慢了一步,还有最大的原因就是“造不如买”的偷懒想法。因为这项技术的复杂,如果想要成功来开发一个传感器,它的研发要再多年的累积才会有结果,国内公司都很难接受这种成本。与其他国外相关公司资金雄厚,如果开发失败,他们可以接受,只要有成功品那就可以。我国公司开始就想用金钱里来直接购买省时间,就像芯片的造不如买模式。
P+F洗车机传感器另外从表格中我们也可以看到,除领普人体传感器外,其他人体传感器都是1-2年的续航时间,但是领普人体传感器续航能力能达到3-5年,还有防水效果,只有领普人体传感器标了IPX5级防水,这意味着它能在浴室等潮湿环境使用,整体性能还是非常出色的。
泰安洗车机传感器正文三角高程测量简便灵活,受地形条件的限制较少,在跨河和跨海及山区等高程传递中发挥了重要作用。在跨河高程传递方面,文献[1—2]对精密三角高程测量的原理与方法、误差来源等进行了研究,并在实践项目中采用两台高精度自动照准全站仪对向观测进行跨河高程传递,验证了该方法在一定条件下可以代替二等水准测量。文献[3]利用该方法在大藤峡水利枢纽左右岸高程联测中展开了实践。在长距离的跨海高程传递方面,文献[4—6]利用自行研制的观测目标联合GNSS测距提出了一种改进的三角高程测量方法,并针对不稳定的海面观测环境构建了相应的数据处理方法,实际工程任务表明在10 km范围内该方法可达到三等水准测量以上的精度要求。文献[7—8]针对跨海桥梁工程施工中的特点和实际条件,利用该技术实现了港珠澳大桥工程的高程传递。在山区高程传递方面,2020年精确测定珠峰高程中最后峰顶测量时采用了包含三角高程测量在内的高程传递技术[9]。文献[10]针对山区复杂环境采用两台高精度全站仪对向观测的三角高程方法为山区高程控制测量提供保障。文献[11—13]提出了移动式精密三角高程测量方法,减少了山地区域高程测量的工作量,提高了效率。虽然三角高程测量在跨河、跨海及山区高程传递中得到了广泛应用,但测站间通视是其必要前提。而高程传递路线上存在一些受山体植被等阻碍遮挡的通视困难区域[14],三角高程测量则无法直接施测,若绕行施测则人力物力成本较高。近年来,无人机技术以其机动灵活和空中视野等优势,为复杂地质地形条件下的工程勘测提供了新思路[15-16],同时测量机器人的自动跟踪能力也逐渐得到重视[17-18]。对此,本文将两者相结合,提出一种微型无人机辅助的三角高程测量方法,论述其基本原理,并分析影响其精度的因素与应对策略,旨在解决通视困难区域的高程快速传递问题。1 微型无人机辅助三角高程测量方法1.1 基本原理三角高程测量通过测量两点间的斜距和竖直角,计算两点间的高差,当两点的距离大于300 m时,须考虑地球曲率和大气折光对高差的影响。虽然对向观测与全站仪中间法观测,可削弱地球曲率和大气折光误差的影响,但全站仪与目标棱镜之间需通视。当存在遮挡时,测站间的高程传递效率降低。当两台全站仪同时照准悬停于遮挡区域上空的微型无人机悬挂的360°棱镜时,则能够突破测站通视条件的限制,有助于提高高程传递的效率。如图 1所示,已知A点的高程HA,求B点的高程HB。将一台全站仪安置在A点,对中整平,量取仪器高为i1,另一台全站仪安置在B点,对中整平,量取仪器高为i2,将悬挂360°棱镜的微型无人机飞至遮挡区域上空,并调至两台全站仪水平距离大致相等后悬停,利用全站仪的自动照准功能对目标棱镜进行同步跟踪测量。在同一时刻t,A点测得竖直角为α1,斜距为S1;B点测得竖直角α2,斜距为S2,则可得(1)(2)图 1 微型无人机辅助三角高程测量 根据式(1)—式(2)计算得到A与B之间的高差为(3)当无人机悬停于A、B两点中间时,其水平距离S1cos α1与S2cos α2大致相等,可认为大气折光系数K1和K2之间的差异较小。此时,地球曲率和大气折光的影响被削弱,同时式(3)简化为(4)为提高高差结果的可靠性,可将无人机飞至不同的高度进行观测并计算高差,最后取平均值作为最终的高差hAB,公式为(5)1.2 精度分析无人机辅助三角高程测量的精度主要受仪器误差、观测路径误差和目标误差3个方面影响。仪器误差,指位于两测站点的全站仪引起的误差。由于无人机在空中悬停时无法保持绝对静止,故需要具有自动跟踪功能的测量机器人对空中的360°棱镜进行动态观测[19]。此时,测量机器人的测角精度、连续跟踪测距精度及自动目标照准(ATR)精度影响高差测量结果。以典型的Leica TS60测量机器人为例,其标称测角精度为0.5″,连续跟踪360°棱镜(Leica GRZ122)测程可达1000 m,连续测距标称精度为3 mm+1×10-6D,ATR确定棱镜(Leica GRZ122)位置在800 m范围内精度优于2 mm。为实现同步跟踪测量,两台测量机器人的时钟需保持同步[20]。简单的方法为,在测量开始前将两台测量机器人放置一起,人工调整系统时钟,此方法可保证同步误差小于0.5 s。将测量机器人的时钟同步后即刻开展后续观测,在短时间内可不考虑时钟漂移对同步精度的影响。同时对两测量机器人采集的数据进行对比处理,进一步消除同步误差。以图 2为例,首先测站点A、B处的仪器连续跟踪测量,获得系列观测值;然后以时间戳为基础,通过长度为3的数据窗口对两测站的数据进行筛选,当对应窗口内的天顶距观测数据均保持稳定时,认为此刻的无人机保持瞬时静止,利用上述观测数据计算高差。图 2 同步观测值的筛选观测路径误差主要指地球曲率与大气折光对高差测量的影响,根据水准测量及全站仪中间法三角高程测量的经验,保持前后视距相等有助于削弱上述误差。对于无人机辅助的三角高程测量方法,也可采用相同的方式,削弱球气差的影响。即在能被两测站均照准的条件下,控制携带观测目标的微型无人机处于两测站的中间位置,并选择较好的气象条件进行同步跟踪测量。在确保无人机到两测站的距离大致相等时,首先在地图上量取两测站间的距离并确定其中点的大致位置,然后实际观测时在该位置垂直起飞无人机。也可首先用GNSS接收机测量两测站的坐标并计算其中点坐标,然后控制无人机,根据该坐标调整位置。对于大气折光影响,微型无人机可悬挂气象传感器,测量飞行路径上的气温、气压等参数,估算大气折光系数,以进行改正。微型无人机辅助三角高程测量的观测目标为无人机携带的360°棱镜,目标对测量结果的影响包括无人机和360°棱镜两方面。无人机悬停时存在抖动,无法确保其到两测站的距离严格相等,此时会对地球曲率和大气折光误差产生影响。以大疆M600多旋翼无人机为例,其标称悬停精度为垂直0.5 m,水平1.5 m,在控制无人机处于两测站中间时,上述抖动误差导致的球气差对高程测量的结果几乎可以忽略。360°棱镜能作为目标被测量机器人从各个方向照准观测,由于制造工艺等限制,从不同方向照准棱镜的测角测距精度存在些许差异。对Leica GRZ122 360°棱镜而言,其标称测量精度能满足高程传递的需求。1.3 观测流程利用微型无人机辅助的三角高程测量方法进行高程传递的主要观测流程如下:(1) 设备准备。选定微型无人机和360°棱镜的型号,将360°棱镜固定在无人机底部作为观测目标。准备两台具有自动照准及跟踪测量功能的全站仪,在正式观测开始前将两台全站仪放在一起,通过人工方式将其系统时钟调整一致,或者通过线缆或无线通信的方式进行全站仪的时钟同步设置。(2) 仪器架设与无人机控制。在不通视的两测站点上分别架设测量机器人,对中整平并量取仪器高。确定两测站的中点位置,选择合适的场地起飞无人机飞至该位置保持悬停,利用两测站处的测量机器人的ATR功能对空中的360°棱镜进行锁定及测距,根据测距结果进一步调整无人机的位置保证其到两测站的距离大致相等。(3) 同步观测。首先设置测量机器人的自动测量记录间隔,对悬停的360°棱镜进行同步跟踪测量记录,必要时进行盘左盘右观测,然后调整无人机飞至不同的高度保持悬停,重复同步跟踪测量记录。(4) 数据处理与高差计算。首先筛选两测站的自动连续跟踪观测值,获取同步观测值,然后根据式(4)计算高差。对于不同悬停高度的连续跟踪观测值,采用相同的方式计算得到多个高差值。利用式(5)计算两测站间的最终高差。2 实际测试2.1 设备选型为了验证微型无人机辅助三角高程测量的可行性,在校园内开展测试。在设备选型上(如图 3所示),采用两台Leica TS60测量机器人观测空中目标,Leica TS60具有超高的测角测距精度,其自动照准与跟踪测量功能,可实现空中抖动目标的连续测量。观测目标方面,将Leica GRZ122 360°棱镜固定在大疆M600无人机底部,大疆M600无人机的飞行载重和悬停精度均满足试验要求。同时,为了检验微型无人机辅助三角高程测量的精度,选用了Leica LS15数字水准仪及配套的水准尺、尺垫,用于测站点间高差的精确测定。Leica LS15水准仪往返测的标称精度为0.2 mm/km。此外还采用钢卷尺测量仪器高。图 3 无人机辅助的三角高程测量测试设备2.2 测试过程试验的测量点位及线路情况如图 4所示,在校园内两个操场的角落分别设置测站点A、B,两点的直线距离约780 m,两点之间被建筑物遮挡无法通视,A、B两点的高差hAB采用水准测量和无人机辅助三角高程测量得到。对于水准测量,首先利用Leica LS15,从A点出发,沿水准路线1到B得到高差hABGL,然后从B点出发沿水准路线2到A进行返测得到高差hBAGL。对于无人机辅助的三角高程测量,将时钟同步的两台Leica TS60测量机器人分别架设在A、B点并量取仪器高。在地图上确定中点位置并垂直起飞大疆M600无人机,当A、B点处的测量机器人均能照准空中360°棱镜时,将无人机保持悬停,此时离地高度为58 m。利用测量机器人的ATR功能自动照准目标并进行平距测量,并根据结果进一步调整无人机位置,使其尽量位于A、B两点中间。设置测量机器人的自动跟踪测量记录间隔为0.1 s,两台测量机器人连续跟踪360°棱镜约1 min,并自动保存观测数据。然后调整无人机分别上升到68、78、88、98 m的离地高度并悬停,两台测量机器人跟踪不同悬停高度的目标约1 min并自动保存观测数据。图 4 试验测量点位分布及测量路线2.3 测试结果对于水准测量,利用Leica LS15数字水准仪确定A、B两点的水准路线长度及往返高差,见表 1。根据表 1的结果可以得到A、B两点的平均高差hABGL=0.032 m。对于无人机辅助的三角高程测量,其高差测量结果见表 2,每个悬停高度筛选3组同步观测数据,计算高差,并取平均值作为该悬停高度的计算高差hABUAV,将5个不同悬停高度计算得到的高差值取平均,得到无人机辅助下的A、B两点的最终高差hABUAV。可以看出,无人机辅助的三角高程测量得到的最终高差hABUAV与水准测量得到的平均高差hABGL差值为0.002 m,由此验证了无人机辅助三角高程测量方法的可行性。同时测试过程发现,在上述测站间不通视的情况下无人机辅助三角高程测量方法的时间效率明显优于普通水准测量。表 1 水准测量高差
订货洗车机传感器Chen 等人提出了一种具有纳米线/Graphene 异质结构的新型静态测量压力传感器。与传统的单纯纳米线或 Graphene 基压电压力传感器相比,该器件可测量静压力,灵敏度可达9.4×103kPa,响应时间低至 57 ms。该压力传感器在电子皮肤和可穿戴设备上有着十分广阔的应用潜力。
参与该项目的SICK工程师告诉记者:“利用这项技术使挑选原木的流程更加高效和富有成效。在试点项目中,我们能够提高材料利用率、产品质量,还能避免资源浪费。更重要的是,在传感器中融入深度学习技术,挑选原木的工人也不再需要处理单调的工作,并且有时间来完成更加复杂的任务。”
去年十月份,FAA和私企CACI签署了合作协议,共同研发一种防止无人机与载人飞机碰撞的技术。上个月,CACI的探测系统在大西洋城国际机场进行了测试,利用五天的时间,进行了141项操作的测试。CACI的无人机探测科技是依靠放置在机场周围的射频传感器,这些传感器可以探测到无人机经常使用的频率,然后对信号进行三角测量,然后搜捕无人机和操作者的位置。(宇辰网)
水幕电影通过高压水泵和专用水幕发生器自下而上喷水,雾化后形成扇形屏幕,专用放映机在屏幕上投射专用录像带,形成水幕电影。当观众观看电影时,扇形水幕与自然夜空融为一体。当角色进出图片时,就像角色从天空起飞或从天而降,产生一种虚幻而梦幻的感觉,令人着迷。水幕电影投影仪由机械设备、控制支架、通信口、软件、时间信号界面和DMX512接口组成。投影仪的发动机由光学传感器控制,具有编程控制、直接控制和实用程序控制三种控制方法。水幕高达20米,宽30米-50米,各种VCD光盘或水幕电影可以在水幕上播放。影视效果奇特、新颖,是更好的广告工具。水幕电影可以安装在各种广场和宽阔的水面上。
所有新型IO-Link 1.1主设备均支持COM3和采用此数据速度的自动化组件——自动适应其所连接的次设备所使用的速率。实际上,让具有不同周期时间的现场设备从一个主设备上运行,以允许使用不同复杂程度的传感器和执行器,以及进行增量式设计升级,是很常见的。采用COM3的230.4千波特数据速率的执行器(通常采用本文下一节所述的B类端口布局)包括液压传动和机电组件——气动阀门、直线气缸、歧管以及基于步进电机的小型现场设备。最常使用COM3的传感器包括位置和位移传感器以及颜色、温度和压力传感器,所有这些传感器在过程控制中最常见。选择机械开关也会利用这个COM3通信模式。