P+F洗车机传感器本文在五相感应电机模型的基波平面设计了基于虚拟绕组思路的正常工况和断任意相工况统一框架下的容错算法,保证断相工况下磁链估计的准确性,电流环控制采用简单且工程实用性强的PI控制器,易于实现。在磁链估计准确的基础上,引入全阶观测器估计电机转速和磁链,从而实现五相感应电机驱动系统在无速度传感器下的容错控制。

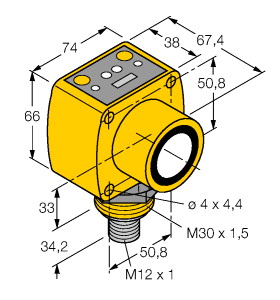
(P+F 超声波传感器 UC4000-30GM-IU-V1-HA)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,可调声功率和灵敏度,温度补偿,已通过 UL 认证,可用于 Class I/Div 2 环境
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : 标准 : EN 60947-5-2 UL 认证 : CSA 认证 : CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 缆线连接器 , M12 x 1 , 5 针 , 4 线 外壳直径 : 35 mm 防护等级 : IP65 材料 : 注意 : 单个组件:UC-4000-30GM-IUR2-V15;V1-G-2M-PVC;ADAPT-ALUM*-M30X1/2 NPT/HB****
临沂洗车机传感器有学者采用结合了磁链观测器的矢量跟踪观测器,抑制了由霍尔信号偏差引起的转子位置估算误差。但增加的磁链观测器性能容易受到电流传感器精度及外部温度等因素的影响。采用观测器法虽然可以解决插值法带来的滞后效应,但其受电机参数的影响较大,而且当电机运行转速很高时,对观测器带宽的要求较高。带宽过宽不仅增大高频干扰而且影响系统稳定性,因此观测器估算性能会因电机转速过高而变差。
清仓洗车机传感器无位置传感器控制方法大体有两种技术路线:一种是基于电机反电动势电磁关系的估计方法,包括直接计算法、反电动势积分法、模型参考自适应法和各种观测器法等,适合反电动势比较容易检测的中高速运行状态,其中前两种方法简单直接,但对电机运行时的参数变化尤其敏感,应用时需与电机参数辨识相结合。
P+F洗车机传感器中国科学院光电技术研究所光束控制重点实验室亓波课题组提出一种基于传感器融合的不依赖模型的扰动观测器(DOB)控制方法,实现对非线性扰动抑制,提高了控制系统闭环性能。该方法利用电机端编码器为电机转速测量反馈元件测得电机转速和负载端编码器为负载转速测量元件测得负载转速,再利用所测得的速率偏差来实施这种DOB的干扰,与位置信号相比,负载和电机之间的速率偏差可以快速显示出行星齿轮系统中存在的扰动以提高齿轮驱动控制系统的位置控制的闭环性能。而由于电机速度闭环的高带宽,则不需要该装置的逆模型。因此,这种DOB控制方法不需要对系统进行复杂的建模。相比于传统控制方法,跟踪精度有很大的提高。
临沂洗车机传感器常用的切换算法主要有加权切换和滞环切换,目前主流的复合控制算法是将高频信号注入法与观测器法相结合,构成复合观测器,而对于大型RDT产品,尤其在重载起动和高低速切换过程中,无位置传感器驱动系统的稳定性和动态跟踪性能存在明显缺陷的情况下,也可探索形成新型集成式位置传感器技术。
清仓洗车机传感器基于MRAS的永磁超环面电机无位置传感器控制系统采用电流转速双闭环控制,电流环和速度环都采用传统的PI控制。永磁超环面电机无位置传感器控制系统通过MRAS自适应观测器来求得所需反馈信号(行星架转子位置角),进而求得该电机转速,然后将估计的转速与给定转速比较,先经过转速环输出给定q轴电流,再经过电流环得到给定q轴电压,同理得到d轴给定电压,经过空间矢量调制模块,输出合适的脉冲实现永磁超环面电机速度控制。
永磁超环面电机是一种新型的特种电机,目前国内外对该电机的研究主要集中在电机结构设计优化、工作原理分析和动力学研究[3-4]。永磁超环面电机控制方法的研究是该电机研究的重要环节,设计合适的控制方法对永磁超环面电机进行调速以达到良好的控制效果,而国内外在此方面的研究较少,所以对永磁超环面电机控制方法的研究具有重要的意义。近年来,技术被提出并应用于电机控制领域。无位置传感器控制技术取消了机械式传感器,该控制技术结构简单、控制精度高。文献[5-6]利用无位置传感器控制技术实现了电机转子位置估算,优化了电机控制技术。无位置传感器控制技术在不增加电机体积和结构复杂性基础上满足控制系统精度,该控制技术适合永磁超环面电机的控制。无位置传感器控制方法有扩展卡尔曼滤波器法、滑模观测器法、反电动势估计法、[7]等方法。由于模型参考自适应法控制相对简单、控制精度高,本文设计了基于模型参考自适应的永磁超环面电机无位置传感器控制系统。
转子位置的获取方式主要包括机械式的位置传感器和无位置传感器算法。其中,机械式的位置传感器会降低系统的可靠性,增加系统的体积与成本,因此,常采用无位置传感器算法。有学者将无位置传感器算法分为基于电机模型的直接估算法、基于状态观测器的闭环算法以及信号注入法。其中,转子磁链观测器基于电机的电压方程,直接计算出转子磁链在坐标轴的分量以实现对转子位置估算,动态响应速度快、简单易行,得到了较为广泛的应用。
开关式霍尔位置传感器具有体积小、成本低、抗干扰性强的优点,通常应用于无刷直流电机(Brushless DC Motor, BLDCM)中,提供电机换相的参考信号。将开关式霍尔位置传感器用于PMSM的转子位置检测又称为准无位置传感器控制方法,是一种既能够保证电机运行性能,同时降低系统成本的转子位置检测技术。三相开关式霍尔位置传感器在一个电周期内仅提供六个离散的霍尔信号,对应离散的转子位置信息。目前,采用离散的霍尔位置信号实现转子位置的高分辨率估算主要包括插值法和观测器法两类。
该电机的转速和转矩调节范围可进一步提高,同时由于电机内部没有永磁体,因此不存在齿槽转矩问题。本文对该电机的结构以及控制理论进行了研究,并实现了该电机基于滑模观测器的无位置传感器研究。最后,利用仿真和样机试验验证了本文DSFM的运行原理和控制理论。