P+F洗车机传感器当将TMS磁传感器放置在大脑运动区域时会导致受试者的手指弯曲抽搐。Airan推测,如果超声波以相当的力量影响神经细胞,受试者也会产生类似明显的行为反应。但是在躯体感觉实验中,即使最大化的效果也是微小的,结果仅仅是在被称为两点辨别的神经敏感性测试中有更好的表现(该测试用来反映分辨皮肤上两点刺激间最小距离的能力)。

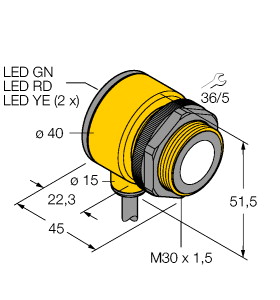
(P+F 超声波传感器 UC4000-30GM-IUR2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 可用前的时间延迟 : ≤ 500 ms 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 210 g 输出 : 评估极限 A1: 500 mm
评估极限 A2: 4000 mm
上升斜坡
莱芜洗车机传感器IMU是惯性测量设备,能测自身位置变换,但由于零漂 温漂 高斯白噪声bias随机游走的存在使其很难作为主定位设备。视觉是外部传感器,可以通过对外界环境的观测估计自身的运动,但摄像头成像质量,光线变化,计算时的时间复杂度都会非常影响结果。
现货洗车机传感器 非色散红外吸收气体传感器:非色散:白光通过三棱镜会被分为七色光即赤、橙、黄、绿、青、蓝、紫。这个三棱镜就是一个分光系统,能把7色光分开。有分光系统的光学系统即色散型光学系统,无分光系统的光学系统即非色散性。非色散系统简易、可靠、小巧、廉价。平时我们感受到的白光、紫外、紅外光都是不同频率、波长混合成的光;而单频率、单波长的光即单色光。前面讲到只有红外线的频率和气体分子振动、转动频率相同时才会产生红外吸收,理论上在设计气体传感器时,我们希望用单色光去照射气体或者照射后我们用设置光栅(滤光片)的办法获得单色光。非色散红外气体传感器通常由光源、光学腔体、滤光片(光栅)、探测器和信号调理电路构成,在传感器中滤光片和探测器是一体的。红外气体传感器优点:1、除了相同原子組成的气体,所有气体都可以测。2、全量程。3、传感过程本身不会干扰传感。缺点:1、昂贵。红外气体传感器本质上是红外幅射导致探测器温度变化进而是电性能变化的温度传感器,传感过程复杂。要求系统有如下特征:光源必须有稳定的红外幅射;光学腔体物理化学性质稳定;滤光片及红外探测器稳定。这些问题,合理的工艺技术本身能较好的解决,但是制造成本高,导致价格昂贵。2、在普通的以宽频红外光源加滤光片加探测器设计中,滤光片本身不能实现理想的选择性滤光,因此干扰尤其是水的干扰一直存在。选择性的问题深层原因在于很多不同的气体分子会有相同的化学键,即有相近甚至重叠的红外吸收。3、粉尘、背景幅射、强吸附及气、液、固易发生转换的检测对象都会对检测结果造成影响。
P+F洗车机传感器单线程调度程序使用以下方式以循环方式将工作分配给多个处理器(例如,可以是Raspberry Pi的阵列)。 MQTT用于数据交换。 每个处理器并行处理数据并产生结果,这些结果由收集器收集,收集器负责将其存储到数据库,NAS或实时呈现。 由于我们没有与用于接收实时飞行数据的真实传感器(例如雷达)建立任何连接以演示实际流处理,因此我们只能选择批处理(即下载历史飞行数据并离线处理它们)。
莱芜洗车机传感器最近使用功能性神经影像技术检测和识别人类情绪状态的研究已成为认知神经科学、情感神经科学和教育心理学研究的主题,以优化学习和记忆结果(Carew 和 Magsamen,2010 年;Um 等人,2012 年) . 人类情绪包括主观感受的复杂相互作用以及特别是由外部刺激触发的生理和行为反应,这些反应在主观上被认为是“具有个人意义的”。三种不同的方法用于监测情绪状态的变化:(1)评估主观感受和体验的主观方法;(2)行为调查面部表情(Jack 和 Schyns,2015 年)、声音表达(Russell 等人,2003 年)和手势变化(Dael 等人,2012 年);(3)通过生理反应的客观方法,包括中枢神经系统 (CNS) 活动的电和血流动力学(Vytal 和 Hamann,2010 年)以及自主神经系统 (ANS) 反应,例如心率、呼吸量/速率,皮肤温度、皮肤电导和血容量脉冲 ( Li and Chen, 2006)。CNS 和 ANS 生理反应(大脑与身体器官)可以通过神经成像和生物传感器客观测量,与主观和行为反应相比,更难以有意识地隐藏或操纵。尽管功能性神经影像学使我们能够识别对认知和情绪处理感兴趣的大脑区域,但如果没有对大脑固有的情绪操作系统有基本的了解,就很难理解情绪对学习和记忆检索的影响。
现货洗车机传感器世界范围内开展了大量该领域的广泛研究,并且已得出一些非常有价值和应用前景的研究成果。20世纪90年代,Horswill研制了POLLY机器人,该机器人采用单目视觉进行导航,但是只能工作在一个颜色固定的场景中。在以后的几年中,研究人员还提出采用占据栅格的地图构建框架和特征位置检测算法,即通过单个摄像头在线处理RGB图像序列,该系统并不采用传统的匹配方法,而是计算每个位置处找到物体的概率。在立体视觉中,机器人可通过两个或多个摄像头来测量距离信息,然而,使用多个摄像头会增加处理成本,实时性会变得非常差。DAVISON A J等人在2007年实现了仅用一个火线接口摄像头作为传感器的monoSLAM[2]算法。但是该单目视觉SLAM算法利用扩展卡尔曼滤波(Compressed Extend Kalman Filtering,CEKF),对于运行时间较长的任务,路标数会不断增大,最终导致计算资源不足以实时更新地图,该问题的产生是由于每个路标都与其他路标相关联。而CEKF算法可在不影响结果准确度的条件下显著减少计算需求,正好能够改进monoSLAM算法存在的问题,所以本文利用实时性良好的FAST角点检测和CEKF对目前的monoSLAM算法进行改进,并运用特征点的逆深度非延时初始化技术,加入了摄像机的经典二参数径向畸变模型,在降低计算复杂度的同时提出一种鲁棒性更高的实时单目视觉SLAM算法。
实验过程中,不同的物体会被随机放置在透明平台上,机器手会依次移动到 24 个预先设定好的位置上,利用腕上安装的 RGB-D 摄像机捕获场景的深度图像。接下来作者使用 TSDF Fusion [12] 密集地重建场景。由于平台是透明的,相机的深度传感器不会捕捉到该平台,被建模物体的 3D 重建会比较简单 —— 只要在重建的场景中剪切(crop)即可。生成的 3D 模型会被用于接下来的模拟中,如下图中间所示,算法需要模拟类似于 M&M 豆大小的灰色的小颗粒物体向被推理对象掉落的物理过程,并计算究竟有多少颗粒会进入到该物体内并被容纳以量化一个物体的容纳性,即判断一个物体是否是开放式容器。若模拟结果显示被推理物体内不保有任何颗粒,则该物体不是开放式容器。在下图例子中,算法对纸杯和一卷胶带分别进行了模拟,结果显示只有纸杯是开放式物体。若一个物体被判断为开放式容器,机器手还会再次进行模拟,以推断自己应该倒入的位置和方向,然后将之付诸于行动。
NDT推出Micro Single Key方案,赋能IoT终端交互深圳纽迪瑞科技开发有限公司(简称“纽迪瑞科技”,即“ NDT ”)宣布推出新一代通用型 Micro Single Key(MSK)压感触控方案,广泛适用于智能家居等物联网应用场景。当前,包括家电在内的智能家居终端正面临联网化、智能化的迭代升级,App 控制、屏幕触控等人机交互界面逐渐成为主流。无论是冰箱、洗碗机、油烟机等大型家电,或是电动牙刷、剃须刀、洁面仪等小型终端,均可使用 MSK 压感触控方案,升级创新的压感触控方式,打造一体化、防水、防污的产品设计,实现更高级、更简约、更人性化的人机交互体验。Eric Ren(NDT 市场销售副总裁)表示:“随着生活品质的提高,消费者对于高端家用电器的购买需求不断增加,例如洗碗机的市场渗透率正在逐年提升。在这样一个需要防水、防油、防污的高频次使用场景下,实体按键、电容触控等并非理想之选。针对这些痛点,NDT 推出的新一代通用型 MSK 压感触控方案,通过贴合于控制面板的背面,可简单、直接地实现高准确率的触控交互指令识别。NDT 不仅能够帮助客户打造一体化、人性化的产品设计,提升终端产品的市场竞争力;同时,NDT 创新的人机交互技术也使得人们的生活方式更加便捷、轻松。” 目前,NDT 通用型 MSK 压感触控方案已在老板电器的油烟机以及高仪(Grohe)的压感童锁开关水龙头上实现落地应用,广受消费者好评。其中,高仪压感童锁水龙头方案将 NDT MSK 压感模块贴合于水龙头开关按钮的内壁,可有效检测用户不同力度的按压操作,通过压力分级与长按、短按操作方式的结合实现童锁开关功能,能够有效地避免儿童误触造成烫伤等问题,同时支持带水操作以及拥有长久使用寿命。 高仪(Grohe)压感童锁水龙头 除了上述产品,NDT 通用型 MSK 压感触控方案也在赋能更多应用的想象空间。例如电器上功能按键 / 操作面板的位置一般是固定的,而压感触控技术则可以将交互界面延伸至整个机身,通过多点压力触控、或者压力分级触控等方式,敲击 / 按压 / 长按 / 滑动机身的任意位置,就能实现对电器的功能调节、模式切换,或电器门开合、童锁开关等。 其他应用场景如一体式压感电动牙刷,利用压感按钮替代实体按键,无需开孔的一体化牙刷机身能够有效避免实体按键藏污纳垢等问题,不仅提升美观度,还可提升按键的使用寿命以及用户体验。此外,厂商可以在刷头处集成压感,当刷头碰到牙齿受压后启动振动,实现防飞溅;同时利用压感的力敏性引导消费者使用合适的力道刷牙,从而确保洁牙程度与保护牙齿。NDT MSK 可赋能广泛的应用领域 NDT MSK 压感触控解决方案并非是单一的按键替换,而是将压感植入到人机交互的日常使用场景中,实现智能理解用户的操作意图,真正让人机交互变得更加舒适简单、直观、直觉而又人性化,同时兼具美学与科技感。NDT 新一代通用型 MSK 的原材料基于 NDT 专利的高分子有机聚合物,可印刷于 FPC、PCB、塑料、玻璃等多种均匀材质表面,适配不同材质的目标面板。该压感触控方案通过检测按压面板形成的微形变来识别使用者的按压操作,单个标准 Sensor 尺寸仅有 7mm*2.15mm*0.4mm。通过在 0.8mm 厚的不锈钢面板上实测,最小激发力仅有 30~50g,可测量的面板变形在垂直于面板方向小于 1 μ m。MSK 传感器的工作温度介乎 -20~60 ℃,具备高灵敏、低功耗、高线性度等特性。FIGUR8使用肌肉骨骼传感器进行在线健身教学的先导测试FIGUR8公司是麻省理工学院媒体实验室在美国成立的一家衍生企业,专门从事使用运动作为生物标志物的肌肉骨骼(MSK)健康诊断。该公司宣布了基于使用肌肉骨骼传感器收集运动数据提供体育训练指导的试点测试结果。
原理:一般由线径15um或20um或30um的高纯度铂线圈并在其外包裹载体催化剂形式球体,在一定的温度条件下,当可燃性气体与上述球体接触时会与其表面的吸附氧发生剧烈的无焰燃烧反应,反应释放的热量导致铂线圈温度变化,温度变化又导致铂线圈电阻发生变化,测量电阻变化就可以测到气体浓度。因此与其说催化元件是气体传感器不如说他是个温度传感器,为克服环境温度变化带来的干扰,催化元件会成对构成一支完整的元件,这一对中一个对气体有反应,另一个对气体无反应,而只对环境温度有反应,这样两支元件相互对冲就可以消除环境温度变化带来的干扰。从温度传感器去理解催化元件会在开发、应用时引导我们不仅仅关注传感过程中化学反应本身,也会吸引我们去更多的关注传感过程与温度有关的温度场的分布与变化、温度场与传感器球体的位移关系、热传导与热幅射、及传质与热传导等。实际上,决定催化元件性能的因素中,促使化学反应发生只是众多传感要素中不太重要的要素,和热传递相关的因素才是最核心的。和半导体元件不同,催化元件传感过程较为复杂,前者是气体与传感器接触后发生的化学反应直接导致传感器电阻即电信号的变化,后者则是气体在催化元件上发生的化学反应首先导致的结果是传感器载体表面及载体内部的温度变化,载体的温度变化经过热传递最终导致铂线圈电阻的变化,完成传感的全过程。传感过程复杂,导致问题产生的几率就大一些。1、对长分子链的有机物以及不饱和烃,对半导体来说,不完全反应导致的积炭只会对反应过程产生影响,而不会对电子传输产生大的影响,而对催化来讲,炭的存在不仅影响反应过程,更会对热传递产生剧烈影响,结果是反应产生的热量向传感器内部传递效率变低了,热量大都散失掉了,最终是,同样的气体浓度,释放同样的热,由于炭的存在,导致传感器:温度只有很小的变化,即灵敏度变得很低。2、因为需要热传递,为了保证热效率,反应必须在瞬间完成,即要求有极高的反应效率,就需要有大量的纳米级的催化剂以及纳米级的孔,这样的特征有利于传感也有利于中毒。3、催化元件的线性是由两个因素决定的a、温度传感材料pt线圈的电阻~温度特性是线性的。b、爆炸下限以内反应放热和气体浓度是线性的。因此,两个因素任一发生变化,就会导致传感器线性变化。实际上,铂线圈会持续升华变细即导阻变大;反应释放的热量与浓度的线性关系只在气体浓度为爆炸下限以内时才成立。
目前的导航定位算法大多被迫在完备性与效率之间进行折中和选择。“全源导航”需要发展新的滤波算法,能够全面兼容各类导航算法,如高斯、非高斯统计算法,或线性、非线性测量模型算法等;同时,新的导航算法必须满足真实环境下实时运行的要求。新的导航算法应当能够处理平台运动和测量可用性之间产生的时变状态空间问题,能够对所有导航测量结果进行统计。因此,在执行任务时,新的导航算法应能够灵活地对传感器、敏感器,以及测量量的引入和去除进行调整,从而提供准确和可靠的导航解决方案。