P+F洗车机传感器快速动态响应由于常规操作过程中不存在摩擦,因此DC-SE6000位移传感器可以很快地响应纤芯位置的变化。LVDT传感器本身的动态响应仅受纤芯轻微质量惯性效应的限制。LVDT传感系统的响应更经常由信号调节器的特性决定。

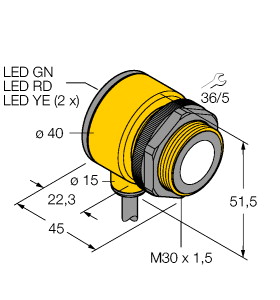
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
聊城洗车机传感器振动实验先固定好各个零部件,振动实验室系统制冷运行,方案Ⅰ中在四通阀的高压口和低压口分别设置压力传感器,方案Ⅱ中系统高压侧及低压侧分别设置压力传感器。在压缩机排气口及压缩机吸气口设置温度传感器,数据用安捷伦数据采集仪采集,在振动台不开启的情况下使系统运行起来,各采集的参数稳定后开启振动台,按表3中振动耐久性实验标准 进行实验。因系统对垂直方向上的振动比较敏感,本文只列出垂直方向上的数据进行讨论。图 8 为方案Ⅰ中四通阀四个出口检测到的压力变化( 两个高压,两个低压,图中只列出高低压) 。
原装洗车机传感器使用诊断仪读取氧传感器信号电压数据,如图1所示。氧传感器信号电压在0.45V没有变化,不正常。根据电路图(如图2所示)把氧传感器(G39)的4针接线插头拔下,测量氧传感器插头上加热器针脚1和针脚2电阻为7Ω,正常。启动发动机,怠速运转,氧传感器线束侧插头上针脚1和针脚2接上试灯,试灯点亮,电压在7~13V之间变化,正常。测量插头的针脚3和针脚4之间的信号电压为0.2V,不正常,应该是0.45V。关闭点火开关,断开发动机控制单元线束,参考电路图并检查发动机控制单元的连接插头和氧传感器4针插头(如图3所示)的导线导通情况。氧传感器针脚3和控制单元针脚34之间的电阻小于1.5Ω,正常。触点4和控制单元针脚62脚之间的电阻为60Ω,大于1.5Ω,不正常。
P+F洗车机传感器图1 重力梯度仪(Stray et al., 2022)。(a)沙漏型重力梯度仪,它使用两个反向定向单光束 MOT,通过多个镜面组件(蓝色)实现梯度测量。初始原子云(绿色)受局部重力加速度g作用下落,在受到相隔时间 T 的光脉冲作用后发生原子干涉(紫色),这里的光束传输用箭头表示。冷却光束(红色)被真空镜(蓝色)偏转以提供全方位冷却,每个输入光束的一部分通过反射镜面组件偏转之后为对面的 MOT 提供冷却光束。原子干涉仪光束(黄色箭头)具有较小的光束能量聚焦半径,因此它们可以通过镜面组件的孔径并且不会有明显的能量削弱。这里的每个干涉仪能够同时操作,垂直基线间隔为1 m;(b)来自每个捕获区域的原子云温度随时间变化曲线(上图)以及1 m原子云分离基线随时间的相对变化曲线(下图)(通过50次测量获得的平均值,每次测量4秒,阴影区域为不确定性范围);(c)测试质量块在两个位置之间移动引起的重力梯度变化——靠近传感器(空心三角点)或远离传感器(实心三角点)。每个测量数字代表一个特定的测试位置质量。每个数据点由八个重力梯度的平均值加权得到测量值,每次测量都包含来自原子干涉仪的25次观测,干涉仪每次测量耗时1.5 s。每个数据点的误差范围是八个重力梯度读数的标准误差。测试质量块大约每20分钟移动一次,误差为±3.5分钟,其位置可重复性为1厘米,变化的模型所预测的重力梯度信号ΔGzz以红色显示
聊城洗车机传感器U5355-00001G-350BG传感器可以由金属和半导体等制成。效应质量的变化取决于导体的材料,这将直接影响流过传感器的正离子和电子,汽车工业通常使用三种半导体材料,砷化镓、锑化铟和砷化铟。最常用的半导体材料是砷化铟。U5355-00001G-350BG传感器的形式决定了放大电路的不同,其输出要适应被控设备。该输出可以是模拟的,例如加速器位置传感器或节气门位置传感器,也可以是数字的,例如曲轴或凸轮轴位置传感器。
原装洗车机传感器本项目研究团队前期针对辉光放电等离子体对低气压范围(0.5~1.0atm)变化的响应特性进行了研究,并通过伏安特性曲线和放电图片确定了传感器工作在辉光放电状态,通过实验证明了利用辉光放电等离子体进行稳态气压测量的可行性。因此,本项目在上述研究的基础上,进一步开展辉光放电等离子体在高气压环境下的实验研究,并针对这种压力传感器开展了稳态标定和激波管动态标定实验。
光电水位传感器是用于测量液体位置变化的传感器,是现在市场上应用比较广泛的传感器之一。光电水位传感器是利用光在两种不同介质面产生反射的原理,当无水时,传感器内发射管所发出的光通过棱镜折射回接收管,当有水时,发射管所发出的光线会折射到液体中,以此来判断有水无水。光电水位传感器有多种款式(分离式、一体式、多点式),其原理都是相同的,可根据应用环境选择。光电水位传感器的检测精度高、内部无机械部件、免调试、灵敏度高,且体积小、结构简单、安装方便(可上置、下置、斜置、侧向安装)。
大疆无人机显示:下视传感器标定参数异常,的故障解决办法大疆无人机使用一段时间以后屏幕会显示:下视传感器标定参数异常。对于新手来说,面对这一情况的出现,可能会束手无策,一时不知怎么解决,老是担心是不是无人机损坏了?其实出现这种情况的原因是因为使用时间过长由于外界因素的影响,传感器的视觉标定参数,发生了变化,这时候我们就要进行重新的参数标定。
该仪器仅通过测量地下空洞引起的微小重力变化,就能够无损地探测到空洞的分布位置。对于10分钟以上的测量,该仪器的灵敏度可达到20E(1E为10-9/s2)。这种传感器使原子梯度计朝着实际应用的方向迈出了一大步。原子重力仪和梯度仪具有天然的长期稳定性,在倾斜和地面振动等环境效应下仍然能够保证测量灵敏度,而且不需要机械部件,因此相比于传统的重力仪,它们具有明显的优势。Stray等人的结果表明,这类仪器将有望很快实现小型化和便携化,更容易在野外测量中得到应用。
下图是汽车半轴球笼,为间接式测量必不可少的一部分。间接测量是通过汽车的轮速传感器来比较轮胎之间的转速差(下图即为轮速传感器检测的位置,通过绿色区域的齿的高低传送轮速信号)。当一个轮胎的气压过高或者是过低,那么轮胎直径就会发生变化导致车速发生变化,胎压监测系统的电脑会比较四个轮之间的轮速差异,继而这种差异就会触发胎压警报系统,在仪表台或者是导航屏显示出来。