P+F洗车机传感器当前,自动驾驶技术需要使用多种传感器,并对这些不同传感器数据进行处理,最终输出单一结果,这就涉及到数据融合。融合又可以分为前融合和后融合,它们的区别在于,融合过程是在检测和跟踪过程之前还是之后。在Apollo感知软件框架中,融合过程位于不同传感器数据跟踪处理之后,是一个典型的后融合过程。整个过程就是将Lidar、Camera、Radar三条处理路线输出的追踪结果进行融合,修正被追踪物体的各项参数数据。

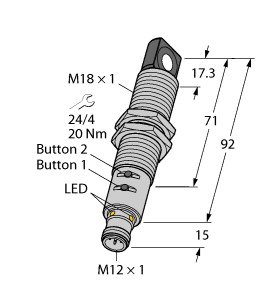
(P+F 超声波传感器 UC4000-30GM-IU-V1-HA)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,可调声功率和灵敏度,温度补偿,已通过 UL 认证,可用于 Class I/Div 2 环境
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : 标准 : EN 60947-5-2 UL 认证 : CSA 认证 : CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 缆线连接器 , M12 x 1 , 5 针 , 4 线 外壳直径 : 35 mm 防护等级 : IP65 材料 : 注意 : 单个组件:UC-4000-30GM-IUR2-V15;V1-G-2M-PVC;ADAPT-ALUM*-M30X1/2 NPT/HB****
枣庄洗车机传感器Map Engine是地图引擎,在软件中负责获取各类地图数据,并提供相应的地图数据功能接口。Localization和Perception分别是定位和感知模块,是处理汽车周围环境信息的功能模块,负责将各类传感器收集到的数据进行加工和处理,用结构化的结果来描述汽车周围的场景。Planning是规划模块,负责对结构化的场景信息进行下一步的处理,通过计算得到一条安全可通行的路径。Control是控制模块,负责把规划的结果转换成对电子油门、电子刹车和电子转向的控制信号,最终实现对车辆运动的控制。
清仓洗车机传感器户内变电站的所有设备、设施均布置在建筑物内,相对于户外变电站,节省了占地面积,降低了运行噪音。与传统变电站相比,定州智慧变电站布置了398个传感器,实时采集各元件状态信息,实现变电设备状态全面感知,可替代73%的停电例行检修试验项目,实现终身免维护;采用“机器人+视频”联合巡检,100%替代人工红外测温和运行例行巡视,其他运维类项目替代率达78%,大大减少人工维护及机具成本。
P+F洗车机传感器进口产品市占率达80% 国产传感器如何摆脱发展困境在业内专家看来,没有 传感器 ,云计算和大数据将“难为无米之炊”,物联网将走向“空心化”,智能制造等实体经济也就成为“空中楼阁”。传感器是物联网中感知、获取与检测信息的窗口,在现代信息技术中有着举足轻重的地位。随着物联网的快速发展,一切都需要性能更优的传感器做支撑,这对传感器产业发展提出了前所未有的挑战。
枣庄洗车机传感器原始的传感器数据经过感知模块的处理,输出的结果会传递到下游预测模块。预测模块主要是针对车辆、行人这类障碍物,预测障碍物在未来一段时间内的运动轨迹。然后便进入了规划模块,结合场景信息和障碍物预测轨迹,进行自车的路线规划。
清仓洗车机传感器艾力绅锐·混动新增的"魔术感应门"配置,其在现有的电动侧滑门基础上,凭借内置于滑动门的静电传感器感知用户手势,携带智能车钥匙的用户在进入车辆智能识别区后,无需接触车门开关,在蓝色LED光束的指引下,挥动手势便可控制车门的开闭。
首先,随着车载传感器生产技术的进步,车载摄像头、毫米波雷达、激光雷达等传感器价格逐渐下探,加快扩散其在自动驾驶汽车中的应用,使得感知层能够更加敏锐、精准地对车辆所处环境进行实时感知,获取周围物体的精确距离及轮廓信息,从而实现避障、自主导航等功能。
这也是云南省乃至整个西南地区首个全物联网公共工程安全监测平台。其先进与智能之处在于运用了物联网、三维BIM、工程大数据分析等前沿技术。在桥梁、边坡、水库、河堤、积水点等公共设施上安装传感器,就好比给这些公共设施装上一部“听诊器”,构建起城市感知网络系统,可7×24小时、全方位、多维度、不间断进行监测。同时还安装摄像头,好比“眼睛”,结合三维BIM、卫星地图、实时数据图表,搭建起数据可视化系统。更重要的是背后还有城市监测数据分析系统这个“大脑”。城市监测数据分析系统可将感知网络传回的监测数据结合公共设施三维模型,运用机器学习和人工智能算法进行进一步挖掘,实现桥梁内部损伤识别、区域车流量及荷载数据分析、城市管网模型分析、边坡滑动预警分析、城市内涝预警模型等多项功能,从而为政府、专家提供科学决策的依据。
这里的融合策略会综合考虑各类传感器的优劣势,比如Lidar在测距方面的表现性能更好,那么对于距离或者空间位置的参数,就会更倾向于选择通过Lidar数据得到的结果。对于交通标志、红绿灯、车道线这类物体,后融合的过程会更倾向于选择通过Camera数据得到的结果。基于这样的考量,就可以将多类传感器数据的感知结果进行融合,从而得到最优解。
自动驾驶技术从硬件到软件都取得了很大的进步,但从具体的技术实现方式看,大多数量产车产品是依托于视觉传感器和控制系统。传感器监测周围环境,控制系统处理数据并生成决策,执行系统根据指令控制车辆驾驶动作。这种技术解决方案有一定的局限性,短期来看效果不错,但长期而言,随着自动驾驶级别的不断增高,道路复杂情况不断增强,数据量不断攀升,会对整体的自动驾驶实现成本和效果稳定性产生影响。并且,传感器由于本身的物理局限性和易损耗等特点,无法保证自动驾驶汽车在全天候、全工况环境下行驶的可靠性。此时,高精度地图就会发挥出重要作用,其将成为视觉传感器的有效补充,为车辆环境感知提供辅助,提供超视距路况信息,从而提升车辆定位精度、感知可靠性以及路径规划能力。