P+F洗车机传感器麻醉机从结构上由以下几部分组成: 机架 、外回路 、呼吸机 、监护系统。 麻醉机从工作原理上由四个主要分系统构成:气体供给和控制回路系统、呼吸和通气回路系统、清除系统,以及一组系统功能和呼吸回路监护仪。某些麻醉机还有一些监护仪和报警器,以指出与心肺功能或呼吸混合气体中气体和麻醉剂浓度有关的某些生理变量和参数的数值及变化。通常生产厂家对标配产品都仅提供较少的监护和报警组合。 下面主要从工作原理说明麻醉机的构成和作用: 1、气体供给和控制回路系统由于麻醉机工作时需要大量的氧气,所以通常是从医院的中央供气系统或氧气钢瓶中获得。从钢瓶输入回路的每种气体,都要通过过滤器、单向通气阀和调节器,调节器可将压力降到麻醉机合适的工作压力。中央供气系统不需要调节器,因为气体已经降到4公斤左右。麻醉机的合适工作压力为3-6公斤。大多数麻醉机都有氧源故障报警系统,如果氧气压力低于2.8公斤以下,机器会减少或切断其他气体的流量,并启动报警器。 在连续流动装置中的每一种气体的流量均由流量计控制,并由流量计显示出来。流量计可以是机械性的,也可以是带LCD的电子传感器。气体通过控制阀和流量计后,进入低压回路,如果需要还要通过蒸发罐,然后供给病人。好的麻醉机,笑气和氧气的流量控制机构应该是连动的,只有这样氧气与笑气的比例就永远不会降到最小值(0.25L/分)。 2、呼吸和通气回路系统 大多数麻醉机可提供连续流动循环的氧气和麻醉气体,称为循环系统。在这类麻醉机中,有两种主要的呼吸回路,紧闭式和半紧闭式。在紧闭式呼吸回路中,病人呼出的气体经去除CO2后,全部返回循环系统。半紧闭式中,病人呼出的气体部分进入循环系统,部分排出循环系统。在循环系统中,新鲜气体的供给流量低于1L/min称为低流量麻醉,低于0.5L/min的新鲜气体流量称为最低流量麻醉。 手动通气要求操作者不断手动挤压储气囊使病人呼吸,在较长时间手术时,操作者不但非常疲劳,而且影响其他工作,因此常用自动呼吸机机械地使病人得以呼吸。呼吸机迫使麻醉混合气体进入病人回路和呼吸系统中,接受病人呼出的气体和新鲜气体。麻醉师可根据病人的情况调节潮气量、呼吸频率、吸呼比和分钟通气量等参数。调节通气方式来满足病人的各种需要。 3、清除系统 又称为二氧化碳吸收系统,由1-2个CO2吸收罐组成,罐内装有钠石灰或钡石灰,主要作用是清除病人呼出气体中的CO2。 4、监护与报警系统 麻醉机根据不同的配置有一套与监护有关的装置,如用于监测气道方面、生理方面、麻醉气体浓度以及能间接反映病人麻醉深度、肌肉松弛程度的监护。大部分麻醉机的监护系统只配一台附有基本监护装置作为系统的平台用,监护的内容包括:气道压力、吸入潮气量、分钟通气量、呼吸频率以及相关的报警系统。所需其他的监护可单独购得,加到系统中去。另外,麻醉工作站还需配有麻醉信息管理系统,这套系统可接收、分析、储存与麻醉临床和行政管理有关的信息,自动采集监护仪的信息并自动生成麻醉记录单。麻醉机从结构上由以下几部分组成: 机架 、外回路 、呼吸机 、监护系统。 麻醉机从工作原理上由四个主要分系统构成:气体供给和控制回路系统、呼吸和通气回路系统、清除系统,以及一组系统功能和呼吸回路监护仪。某些麻醉机还有一些监护仪和报警器,以指出与心肺功能或呼吸混合气体中气体和麻醉剂浓度有关的某些生理变量和参数的数值及变化。通常生产厂家对标配产品都仅提供较少的监护和报警组合。 下面主要从工作原理说明麻醉机的构成和作用: 1、气体供给和控制回路系统由于麻醉机工作时需要大量的氧气,所以通常是从医院的中央供气系统或氧气钢瓶中获得。从钢瓶输入回路的每种气体,都要通过过滤器、单向通气阀和调节器,调节器可将压力降到麻醉机合适的工作压力。中央供气系统不需要调节器,因为气体已经降到4公斤左右。麻醉机的合适工作压力为3-6公斤。大多数麻醉机都有氧源故障报警系统,如果氧气压力低于2.8公斤以下,机器会减少或切断其他气体的流量,并启动报警器。 在连续流动装置中的每一种气体的流量均由流量计控制,并由流量计显示出来。流量计可以是机械性的,也可以是带LCD的电子传感器。气体通过控制阀和流量计后,进入低压回路,如果需要还要通过蒸发罐,然后供给病人。好的麻醉机,笑气和氧气的流量控制机构应该是连动的,只有这样氧气与笑气的比例就永远不会降到最小值(0.25L/分)。 2、呼吸和通气回路系统 大多数麻醉机可提供连续流动循环的氧气和麻醉气体,称为循环系统。在这类麻醉机中,有两种主要的呼吸回路,紧闭式和半紧闭式。在紧闭式呼吸回路中,病人呼出的气体经去除CO2后,全部返回循环系统。半紧闭式中,病人呼出的气体部分进入循环系统,部分排出循环系统。在循环系统中,新鲜气体的供给流量低于1L/min称为低流量麻醉,低于0.5L/min的新鲜气体流量称为最低流量麻醉。 手动通气要求操作者不断手动挤压储气囊使病人呼吸,在较长时间手术时,操作者不但非常疲劳,而且影响其他工作,因此常用自动呼吸机机械地使病人得以呼吸。呼吸机迫使麻醉混合气体进入病人回路和呼吸系统中,接受病人呼出的气体和新鲜气体。麻醉师可根据病人的情况调节潮气量、呼吸频率、吸呼比和分钟通气量等参数。调节通气方式来满足病人的各种需要。 3、清除系统 又称为二氧化碳吸收系统,由1-2个CO2吸收罐组成,罐内装有钠石灰或钡石灰,主要作用是清除病人呼出气体中的CO2。 4、监护与报警系统 麻醉机根据不同的配置有一套与监护有关的装置,如用于监测气道方面、生理方面、麻醉气体浓度以及能间接反映病人麻醉深度、肌肉松弛程度的监护。大部分麻醉机的监护系统只配一台附有基本监护装置作为系统的平台用,监护的内容包括:气道压力、吸入潮气量、分钟通气量、呼吸频率以及相关的报警系统。所需其他的监护可单独购得,加到系统中去。另外,麻醉工作站还需配有麻醉信息管理系统,这套系统可接收、分析、储存与麻醉临床和行政管理有关的信息,自动采集监护仪的信息并自动生成麻醉记录单。

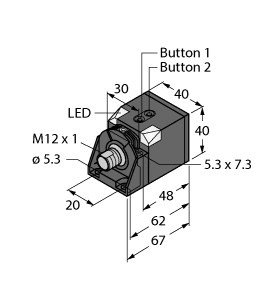
(P+F 超声波传感器 UC4000-30GM-IU-V1-HA)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,可调声功率和灵敏度,温度补偿,已通过 UL 认证,可用于 Class I/Div 2 环境
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : 标准 : EN 60947-5-2 UL 认证 : CSA 认证 : CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 缆线连接器 , M12 x 1 , 5 针 , 4 线 外壳直径 : 35 mm 防护等级 : IP65 材料 : 注意 : 单个组件:UC-4000-30GM-IUR2-V15;V1-G-2M-PVC;ADAPT-ALUM*-M30X1/2 NPT/HB****
威海洗车机传感器德国VOLFA位移传感器LWF-250-A1静态标定器是由高精度的千分尺和专用的支架定制而成,用于传感器的静态标定和校准,以求得VOLFALWF-250-A1直线位移传感器的输入――输出特性曲线,同时用来求得VOLFA传感器LWF-250-A1理想安装距离和标定变换器标准输出。一旦校正德国VOLFA LWF-250-A1线性位移传感器以后,德国VOLFA LWF-250-A1位移传感器的“零位”和“满度”电位器就不宜再动了,以保证VOLFALWF-250-A1电子尺精确测量。“零位”与“满度”电位器是须反复调整几次,德国VOLFA位移传感器LWF-250-A1才能达到
价格洗车机传感器当激光测距仪故障或交战距离极短(低于200米)且情况紧急时,车长可能会下达使用战斗瞄准(Battle Sight)的命令,其原理是将预设的归零数据输入弹道计算机,而主炮也会将俯仰角自动调整成与十字线APFSDS(l 200米)、MPAT(l 000米)和HEAT(900米)归零的角度,也就是说当炮长将十字线中央置于1 200米远的坦克目标时,APFSDS可命中十字线中央,置于900米远的坦克目标时,HEAT可命中十字线中央。因此,战斗瞄准仍需弹道计算机具备基本运算能力,不过因为不具备输入其他传感器能力(例如横风、激光测距和陀螺仪等),因此远距离命中率较差,对付机动目标效率也不佳,但只要目标大于1.5米且在归零距离内,其命中率依然非常高。
P+F洗车机传感器为了能够对输入信号动态范围较大时的小信号和大信号都实现无失真放大,基于压电式电容型传感器的等效电路模型,根据实际工程检测中的高输入需求,设计了一种在输入信号频率为10 kHz时,输入信号幅值最高达600 mV且输出无失真的前置放大电路。
威海洗车机传感器 排除了位移传感器的故障后,再检查放大器单元是不是正常。先断开放大器单元的输出信号。拆除输出接线,再通过工作站给放大器单元加一个直流输入信号,并测量放大器单元的输出情况,重复几次后,测量到的放大器单元的输出信号成线性变化趋势,以判定放大器单元正常。
价格洗车机传感器int n = 0; // 硬币数量nint core = 6; // 光电传感器引脚int val_core = 0; // 低电平灯亮;高电平,有东西灯灭uint8_t SEGPLAY[] = { 0xC0, //"0" 0xF9, //"1" 0xA4, //"2" 0xB0, //"3" 0x99, //"4" 0x92, //"5" 0x82, //"6" 0xF8, //"7" 0x80, //"8" 0x90, //"9" };uint8_t DIG[] = {0b10000000, 0b01000000, 0b00100000, 0b00010000, 0b00001000, 0b00000100, 0b00000010, 0b00000001, }; #define dataPin 9 //数码管 DIO #define clockPin 10 //数码管 SCK #define latchPin 11 //数码管 RCK void setup() { pinMode(latchPin, OUTPUT); pinMode(clockPin, OUTPUT); pinMode(dataPin, OUTPUT); pinMode(core, INPUT); }void loop() { val_core = digitalRead(core); //读取输入 if ( val_core == 1) //光电传感器输出1 { n = n+1; //硬币数加1 delay(50); } playnum (n, n); //数码管显示硬币数}//函数作用:用于四位数码管显示数字//输入值:unsigned int 范围0-9999 //void playnum (unsigned int i, unsigned int n) { SegDisplay(i / 1000, 0); SegDisplay((i % 1000) / 100, 1); SegDisplay((i % 100) / 10, 2); SegDisplay((i % 10), 3); SegDisplay(n / 1000, 4); SegDisplay((n % 1000) / 100, 5); SegDisplay((n % 100) / 10, 6); SegDisplay((n % 10), 7); //delay(5);}//函数作用:用于单位数码管显示数字//输入值:i 范围0-11 //// 显示位置 1-4 //void SegDisplay(int i, int j) { digitalWrite(latchPin, LOW); shiftOut(dataPin, clockPin, LSBFIRST, DIG[j]); //位选 shiftOut(dataPin, clockPin, MSBFIRST, SEGPLAY[i]);//段选 digitalWrite(latchPin, HIGH); delayMicroseconds(500);//调节这个和下面的参数可以调整显示亮度,建议这两个数加起来为860。这样是为了显示时间准确 // delayMicroseconds(360);}效果展示:
由于传感器的输出摆幅为10mV左右,信号相对比较小,如果直接输入给ADC,将损失ADC的大部分动态范围。因此,需要有PGA进行幅度调整,PGA最大增益可以设置为64、128或256,并且可以配置调整。具体选择需要根据压力传感器和ADC范围确定。ADC除了前面提到的分辨率和噪声之外,还有一个重要指标需要考虑,即采样率。不同的称重系统和不同的应用场合对采样速度的要求很大不同,一般来说,静态称重采样率在20Hz以内,动态测量则要求几百Hz甚至几百kHz。
我们在使用奉信CDFS-50kg称重传感器考虑以下一些具体问题:CDFS-50kg称重传感器量程的大小;被测位置对CDFS-50kg称重传感器体积的要求;bongshin CBFS-50kg传感器测量方式为接触式还是非接触式;信号的引出方法,有线或是非接触测量;bongshin传感器的来源,bongshin称重传感器的线形范围是指输出与输入成正比的范围。
万物互联,传感器是基础,是信息输入的“窗口”,物联网、大数据、云计算乃至智慧城市的各种技术,都依赖于传感器提供的基础功能。中国工程院院士、西安交通大学教授蒋庄德认为,随着科技进步,微米、纳米技术以及智能传感技术发展进入了快车道。
传感器对于每个物联网应用与互联网一样至关重要。想象一下没有麦克风的Alexa或Google Home:它不起作用。人们将无法与该设备进行交互,或者需要其他类型的传感器(例如键盘)来获取用户的输入。同时,应用程序指示需要哪种传感器。没有麦克风的智能家居设备将无用。通过语音与设备互动,使用户可以在许多不同的地方或参加其他活动(例如烹饪)的同时,仍可以使用设备。物联网应用中的传感器是软件的眼睛,耳朵和鼻子。就像允许人类与世界互动的器官一样,传感器是软件检测物理世界并与之交互的方式。