P+F洗车机传感器目前的主机VR三大头显 HTC Vive 、Oculus Rift和PSVR可以提供令人满意的沉浸式体验,其定位技术功不可没。HTC vive所用的Lighthouse技术属于激光扫描定位技术,靠激光和光敏传感器来确定运动物体的位置。Oculus Rift以及索尼 PlayStation VR 所用的定位技术都属于光学定位技术,其中Oculus Rift是红外主动式光学技术,索尼PlayStation VR则是可见光主动式光学技术。每种定位技术具有不同的特点,没有好坏之分,只有适合不适合,这也是挑选VR头显时需要考虑的重要因素之一。

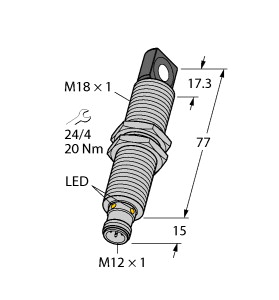
(P+F 超声波传感器 UC4000-30GM-E7R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,NPN,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
烟台洗车机传感器在未来,随着各种低功耗、一次性使用的电子产品比如用于跟踪物体的智能标签、环境传感器和医疗诊断设备等被大规模投入使用,那么,这些电子产品都迫切需要一种可生物降解的电池来作为动力,而一次性印刷纸电池是其中一种非常有效的解决方案。
样本洗车机传感器传感器的官方解释是,它是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。传感器的特点包括微型化、数字化、智能化、多功能化、系统化、网络化。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。
P+F洗车机传感器人体上穿戴的理想型加速度计的输出主要来源包括身体运动产生的加速度,重力加速度,外部,而不是人体本身(例如车辆带来的)产生的振动,撞上其他物体传感器产生的加速度。前两者与身体下意识的移动有关,后两者可能会给加速度计输出带来“噪音”,应该通过适当过滤技术削弱。
烟台洗车机传感器倾斜摄影测量是近年来发展起来的一项新的测量技术,它改变了以往航测遥感影像只能从垂直方向拍摄的局限性,倾斜摄影测量通过飞行平台搭载多台传感器从多个角度对进行目标物体数据的采集,可以快速、高效地获取丰富的数据信息,再通过配套处理软件对数据信息进行几何校正、平差、多视影像匹配等一系列的处理得到具有地物全方位信息的数据。它可以直接基于成果影像进行包括高度、长度、面积、角度、坡度的测量。
样本洗车机传感器自动对焦自动对焦(Auto Focus)是利用物体光反射的原理,将反射的光被相机上的传感器CCD接受,通过计算机处理,带动电动对焦装置进行对焦的方式叫自动对焦。它多分为二类:一是主动式,另一个则是被动式。
在航行期间,“Falco”号与80名受邀贵宾一起在完全自主控制下进行了航行。这艘渡船配备了大量的传感器,这些设备可以与人工智能软件相互连接,以便识别和避开附近的物体。另外,罗罗和Finferries展示了一种“自动停泊”系统,可以使渡船在进入港口时改变速度和航线。所有这一切都是在没有船员人工干预的情况下实现的。
▼在头部缓冲带正中的位置设置有一个黑色横条的回冲传感器,同时带有压力传感功能,功能是感应前面障碍物和墙面的物体,带有压力传感器的扫地机会更为智能,在碰撞物体的时候只会是清碰,而不是靠“撞”去感应,而前部分凸起的防撞条是整个一体成型,不像家里之前使用的扫地机是胶粘上去的,不用去担心会脱落的问题。
他起期待未来,不管是这个一心的药的研制与试验呀啊,或者是一些这个医学的基础研究呢?如果搞了一堆虚拟病人,他真的能够高度仿真真的病人的话,那么他的这个实际的商业价值包括对人类在医学的贡献的肯定是非常的巨大。那么第四个呢,就是所谓的空间计算。那么这个东西呢,说起来比较容易理解,相对比较容易理解了。我们看到世界经济论坛的报告提到空间计算是超越VR就是虚拟现实以及AR就是增强现实下的一个另外一个重大的一个这个突破的方向空间计算是未来深度融合的物理和数字世界,他可以完成虚拟现实和增强现实应用所做的一切就是能通过云端连接的物体把这个物体呢。数字化让整个的传感器和电机相互发生反应,将现实世界的数字化呢。这个去进行一个啊,就是说科技的转换这个呢?我举个简单的例子,就比如说,嗯,仓库里吧,或者是哪里?我们经理或者是叫做一个大商场里,我们经常的会有一个概念,就是呢啊,我们开车的时候,我们导航或者是我们走路的时候骑自行车。反正不管怎样,我们在马路上我们可以导航,我们知道到了哪里,有的时候到了一个大商场里啊,说谁谁谁在哪里的话?那么过往的做法就是像看门牌号一样,得把第几层多少多少好。但有的时候现在商场太大,真的很难找。那么大家有没有想过在商场内的导航对吧,或者说在家里有一个盲人,那么家里面物品放在哪里,什么东西放在哪里,那么这个东西呢?
其实理论上他都是用数字可以描述的,用空间了,是可以把它给计算出来的。那么如果这么做的话,就是说把这些功能和高清晰度的空间映射项进行结合,就使得整个计算机呢。能够插的这个协调器就能够跟踪并且呢?当人在数字或者物理世界当中进行导航时,能控制物体的运动和他的互动,那么整个空间的计算的就会很快的把人机和机机这样一个互动的带到一个新的水平。这个应用是非常广泛的啊,那么有的朋友可能不一定听得明白就是说呢,他会在整个工业呀,医疗呀,包括交通啊,家庭啊。我刚刚说的在商场里的内部导航等等非常多的方面。我们现在看到包括微软,亚马逊在内的各个大公司都在大力的投资这项技术。目前的整个工业界已经接受了所谓的专用传感器,数字双胞胎和物联网的整合,那么用于优化整个生产力可能成为空间计算的早期采用者和这个受益者。那么工人可以被引导穿过机器和机器的周围,尽可能高效地工作,从而减少时间和成本。如果一个人这个一个这个技术人员,在一个虚拟现实的远程现场指挥几个机器人建造一个工厂,那么整个空间计算算法呢?可以帮助优化工作的安全性,有效性和他的质量啊。那么这个呢?就是说,它整个的空间通过仿真模拟呢,变成一个真实物理世界的一个映射啊。那么他呢,就是说可操纵性他的这个未来的应用的就非常的广泛。