P+F洗车机传感器制造StretchSense MoCap Pro手套的StretchSense的首席执行官Benjamin O'Brien进一步指出了手指追踪技术中的一些固有技术挑战。他建议,诸如IMU和光学标记之类的解决方案可能并不总是为动作捕捉的动画表演提供所需的精度,至少它们本身不能。StretchSense 手套有些独特之处在于它们结合了拉伸传感器(本质上是电容式橡皮筋),而手套的手指跟踪利用了与机器学习元素相结合的姿势检测系统。

(P+F 超声波传感器 UC4000-30GM-2EP-IO-V15)
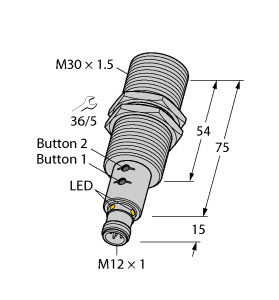
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,2 路可编程的开关输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 2 路推挽式(4 合 1)输出,短路保护,反极性保护 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出功能: 窗口 模式
输出特性: 常开触点 输出 2 : 近开关点: 500 mm
远端开关点: 2000 mm
输出功能: 窗口 模式
输出特性: 常开触点 光束宽度 : 宽
淄博洗车机传感器与大规模集成电路产品均采用标准的 CMOS 生产工艺不同,MEMS 传感器芯片本质上是在硅片上制造极微小化机械系统和集成电路的集合体,需要综合运用多学科、多行业的知识与技术、生产加工工艺具有明显的非标准化和高度的定制化以及对产品供应链体系的支撑有着非常高的要求等特点。MEMS 芯片具有非常强的工艺特征,三维制造工艺与集成电路的二维制造工艺相差甚大,这也是国家十四五规划中明确将 MEMS 特殊工艺的突破纳入其中的重要原因。
现货洗车机传感器用于蛋白纯化设备中测量液体压力的光纤传感器随着分子生物学、结构生物学、基因组学等研究的不断深入,人们意识到仅仅依靠基因组的序列分析来试图阐明生命活动的现象和本质是远远不够的。只有从蛋白质组学的角度对所有蛋白质的总和进行研究,才能更科学地掌握生命现象和活动规律,更完善地揭示生命的本质。
P+F洗车机传感器在讲到自动驾驶等级的发展路线时,嬴彻科技CTO杨睿刚表示认可L3-L5的渐进式迭代。首先,他认为L3与L4、L5的自动驾驶车辆,机器成为驾驶主体,不论是从软件架构、传感器配置、对车辆底盘的要求,都没有本质区别。
淄博洗车机传感器机器视觉是与工业应用结合最为紧密的人工智能技术,通过对图像的智能分析,使工业装备具有了基本的识别和分析能力。随着工业数字化、智能化转型逐渐深入,智能制造的逐步推进,工业机器视觉逐渐形成规模化的产业,并随着人工智能技术在工业领域落地而逐渐深入到工业生产的各种场景之中。工业相机是工业视觉系统的核心零部件,其本质功能是将光信号转变成电信号,要求产品具有较高的传输力、抗干扰力以及稳定的成像能力。工业相机作为新兴技术被寄予厚望,被认为是自动化行业具备光明前景的细分市场。也正因为机器视觉在工业领域的地位越来越重要,而国内的机器视觉技术发展也在突飞猛进,市场不断扩大。在此背景下,海外享有德国工业设计界红点奖盛誉的视觉系统设计创新奖Innovators Awards首次来到中国,该奖项旨在表彰在产品或技术、应用程序或研发方面表现卓越的机器视觉行业公司。经过激烈角逐,近日在万众期待下主办方正式揭晓了评选结果。机器视觉技术的全球领导者Teledyne DALSA参赛的Linea HS 32K 相机在众多参选产品中脱颖而出,斩获金奖。01 Linea HS 32k TDI 相机:在降低系统成本的同时还可提供成像分辨率当今机器视觉的最大挑战之一是在保持甚至降低系统级成本的同时提高成像分辨率。Linea HS 32k TDI 相机提供了创新的解决方案,可以满足这种相互矛盾的要求。OEM可以轻松地将该新型相机集成到现有系统中,实现更高的性能,而无需更改任何光学元件。Linea HS 32k TDI 相机Linea HS 32k相机使用Teledyne DALSA的电荷区CMOS TDI传感器,该传感器具有双16k×64像素阵列和5×5μm大小的像素。在图像采集卡中重建数据后,以200kHz行频、6.5GB/秒的速度输出32k/2.5μm的超分辨率图像。这款Linea HS 32k TDI 相机具有以下几点优势:32k/2.5um的最高分辨率200kHz、6.5GB/秒的最大速度亚像素精度级缺陷的信噪比提高3~5倍无需升级现有光源和镜头Teledyne DALSA的核心竞争力在于专门的集成电路和电子技术、软件和高度工程化的半导体晶圆加工,因此Linea HS 32k相机在半导体行业精密量测领域具有很强的竞争力。相机在水平和垂直方向上有½像素偏移,通过这2个象素偏移的阵列,相机能够以实时数字重构的方式来实现较高的分辨率。32K CMOS TDI 传感器,400帧的速度,出色的灵敏度。 具体来说这款产品在半导体行业精密量测领域的创新点有以下三个方面: 其一,该相机的CMOS传感器采用像素偏移技术具有高灵敏度和高分辨率。传感器的独特设计使其在水平和垂直方向上有½像素偏移,该传感器具有双16k×64像素阵列和5×5μm大小的像素。在图像采集卡中重建数据后,以200kHz行频、6.5GB/秒的速度输出32k/2.5μm的超分辨率图像。 传感器具备高的响应度、高MTF、低系统成本,该产品正在申请专利。Linea HS 32k相机使用Teledyne DALSA的电荷区CMOS TDI传感器,该传感器具有双16k×64像素阵列和5×5μm大小的像素。在图像采集卡中重建数据后,以200kHz行频、6.5GB/秒的速度输出32k/2.5μm的超分辨率图像。 其二:该产品技术创新度较高,无需升级现有光源和镜头。传感器具备高的响应度、高MTF、低系统成本,该产品正在申请专利。 其三:缺陷的检测性能较强。该相机数据重构是在图像采集卡中实现的,这大大增强了对亚像素缺陷的检测能力,创新性较强。这样可以在系统层面为客户节省大量成本,市场竞争力强。 据了解,Linea HS 32k相机的应用场景有无损检测工业X射线、连续卷材检测、太阳能电池/平板检测、晶体和掩膜质量控制检测等,另外在印刷品检测、邮政包裹检测、工厂自动化的机器视觉、食品和包装检测中亦可使用。 在机器视觉、成像方面,Teledyne DALSA公司销售和营销副总裁Phil Colet认为非工业成像应用也同样具有较大的增长潜力。就是把过去在工厂车间使用的视觉系统,在新的市场中找到了用武之地。视觉辅助驾驶是其中一个很好的例子。同样,绿色能源或视觉检测以促进更环保的解决方案,正在推动对质量检测的要求。目前,锂离子电池制造商正在投资机器视觉系统,以支持电动汽车市场的发展。相信像Teledyne DALSA这样一家具有市场前瞻性的公司,未来在机器视觉行业大有作为。
现货洗车机传感器由于 Apple TV 的形式本质上是电视盒子,搭配不同的电视会使得体验参差不齐。为此苹果提供了新的色彩校准程序,通过与 iPhone 前置环境光传感器的配合,对电视的画面进行校准。整个校色过程类似蓝蜘蛛,需要用 iPhone 正面紧贴电视表面,贴膜用户恐成最大输家。
虽然相对于现有的仿生眼设计是一个巨大的改进,但EC-Eye的视觉跟人类的天然眼睛相比仍有着很大差距。但研究小组表示,这种情况可能不会一直得不到改变。通过使用更密集传感器阵列并将每个传感器连接到单独的纳米线上,这项技术有潜力超越现实的眼睛。另外该团队甚至还表示,通过在EC-Eye的不同部位使用其他材料可以赋予用户更高的红外灵敏度--本质上就是夜视能力。
光纤温度传感是光纤传感的一个重要分支。所有与温度相关的光学现象或特性,本质上都可以用于温度测量,基于此,用于温度测量的现有光学技术相当丰富。已产品化的光纤温度传感器占到将近所有光纤传感产品的20%。由于光纤温度传感技术的先天抗电磁干扰等特性,被众多研究者用来对微波场进行温度传感。
各大科技巨头相继推出可穿戴产品和数字健康平台后,大巨头微软也终于按耐不住,推出了自己可穿戴产品——MicrosoftBand。虽然它本质上是微软针对开发者做出来的炫技之作,但它上面的传感器简直多得不可思议:光学心率传感器、三轴加速计、陀螺测试仪、GPS、环境光线感应器、皮肤温度感应器、紫外线感应器、电容传感器、皮电反应感应器……
引文格式:余俊鹏, 吴伟东, 孙佳明, 等. 附加傅里叶补偿项的卫星遥感影像RFM平差方法[J]. 测绘学报,2022,51(1):127-134. DOI: 10.11947/j.AGCS.2021.20200429YU Junpeng, WU Weidong, SUN Jiaming, et al. A RFM adjustment method for satellite remote sensing image with Fourier compensation[J]. Acta Geodaetica et Cartographica Sinica, 2022, 51(1): 127-134. DOI: 10.11947/j.AGCS.2021.20200429 阅读全文:http://xb.sinomaps.com/article/2022/1001-1595/2022-1-127.htm引 言有理函数模型(rational function model, RFM)自1999年作为商业遥感卫星IKONOS-2的影像定位模型推出后,因其通用性强、方便实用等优点,很快被广泛应用,成为卫星遥感影像处理的主要几何模型[1]。由于RFM本质上是遥感成像几何的一种数学拟合模型,受影像内外方位元素观测误差影响,RFM直接定位结果存在系统误差。为满足测图精度要求,学者们分别提出了RFM的像方平差和物方平差方案[2]。目前以像方平差方案较为常用[3],该方案保持RFM模型参数(rational polynomial coefficients, RPC)不变,通过附加像方定位系统误差补偿项并对其进行平差求解,使影像定位精度显著提高[4-9]。近年来,随着遥感卫星的数量和类型增多,RFM平差方法随之不断优化,以适应不同场景的数据处理需求。文献[10]针对弱交会条件下卫星遥感影像区域网平差无法正确求解的问题, 通过引入数字高程模型作为高程约束,实现近似垂直观测影像的高精度平面定位。文献[11]利用同轨道长条带卫星影像的系统误差分布特性,提出基于轨道约束的区域网平差方法,减少了平差所需控制点。文献[12]对于大规模区域网平差问题,利用RPC生成虚拟控制点,并将其作为带权观测值引入平差模型,克服了在无控制点条件下平差精度不稳定的问题。文献[13]提出一种利用平均高程面的RFM区域网平差模型,改进了国产静止轨道遥感卫星高分四号影像的内部拼接精度。文献[14]提出采用三阶多项式进行像方系统误差补偿,提高了资源三号立体影像定位精度。尽管RFM平差的实现方法因具体需求而异,但其平差模型都采用一般多项式作为附加项,对像方系统误差的补偿效果基本相同。而卫星传感器成像受到姿轨误差、平台颤振、大气折光、镜头畸变、焦面形变及内部拼接等各种因素影响[15-19],实际的像方系统误差相当于一种复杂畸变。由于一般多项式理论上无法对整个像幅范围内的多种畸变进行精确拟合,在某些点位可能残存较大误差,导致定位结果的精度和可靠性降低。对此,本文根据傅里叶级数的逼近特性,提出一种可适应符合连续条件下任意形式畸变的RFM平差方法,并通过模拟和真实数据的平差试验,验证了该方法的可行性和有效性。1 平差模型1.1 RFM基本形式RFM是星载传感器成像几何的一种通用数学表达式,将成像目标的像点坐标(R, C)表示为物方坐标(B, L, H)的多项式的比值,如式(1)所示 (1)式中,(r, c)为正则化的像点坐标;(φ, λ, h)为正则化的物方坐标,物方坐标可取地心直角坐标、大地坐标或地图投影坐标。正则化公式为 (2)式中,Roff、Rscale、Coff、Cscale为像方坐标的正则化参数;Boff、Bscale、Loff、Lscale、Hoff、Hscale为物方坐标的正则化参数。经正则化后,像方坐标和物方坐标数值范围为(-1.0~+1.0),以减小两者转换计算误差。P1、P2、P3、P4均为一般多项式,最高不超过3次,形式为 (3)式中,aij(j=1, 2, …,20)为多项式系数,即RPC参数,其中a21、a41取常数1。RPC参数通常由地形无关算法得到,即先利用影像定向元素构建严格成像几何模型,并在影像覆盖区域范围内生成虚拟控制格网,再根据大量均匀分布的虚拟控制点坐标求解RPC参数。