P+F洗车机传感器合创Z03的尺寸为4602/1900/1645mm,轴距2750mm,典型的电动车比例,轴距约等于中型SUV的长度,而长宽高是标准紧凑SUV的大小,保证了车内空间。侧面前后轮眉带有宽体设计,18英寸的轮圈保证视觉效果,隐藏式门把手、低风阻的轮圈均能降低阻力,行驶起来的噪音也明显弱化。后视镜外壳有仿碳纤维的花纹,看起来很动感。车辆的后门可以打开90度,上下车非常便利,这是很多车都做不到的。

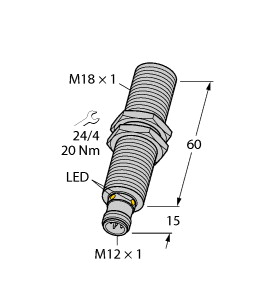
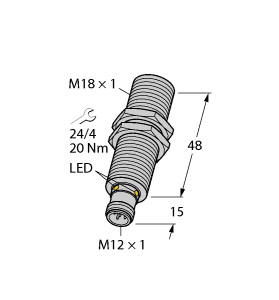
(P+F 超声波传感器 UC4000-30GM-IUR2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 可用前的时间延迟 : ≤ 500 ms 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 210 g 输出 : 评估极限 A1: 500 mm
评估极限 A2: 4000 mm
上升斜坡
莱芜洗车机传感器挑选适合自己的手与接受能力的雪茄,是入门第一步。选择合适的雪茄有助于提升品鉴感受。比如对于手小的人士来说,选一个环径超过 50 号、长度超过 20cm 的雪茄,有可能在长时间举雪茄的过程中导致手部疲劳。
中国洗车机传感器另外,“高频率”这个限制因素会减少天线的尺寸,这又是一个意外的惊喜。假设我们使用的天线尺寸相对无线波长是固定的,比如1/2波长或者1/4波长,那么载波频率提高意味着天线变得越来越小。比如说,一个900M GSM天线的长度是几十厘米左右,而毫米波天线可能只有几毫米。这就是说,在同样的空间里,我们可以塞入越来越多的高频段天线。基于这个事实,我们就可以通过增加天线数量来补偿高频路径损耗,而又不会增加天线阵列的尺寸。这让在5G毫米波系统中使用massive MIMO技术成为可能。
P+F洗车机传感器 海豚作为一款小型车,在设计上就有着短车身长轴距的特点,车身长度4070mm,轴距已经达到了2700mm,最小转弯半径仅为5.25米,轻快灵活是其操控上的突出特点,这也让其在城市车流中穿梭显得轻松自如,而且在停车泊位的时候也很方便。
莱芜洗车机传感器508L还是神龙公司首款全面应用结构胶工艺的车型,全车结构胶长度有21m,车身刚度提升20%。而气囊和约束系统采用一线供应商,全车采用奥托立夫气囊还有采埃孚所生产预紧式安全带,前后排座椅也针对不同体型和不同碰撞方向做了一系列安全碰撞研制,确保座椅在保护乘员方面起到作用。
中国洗车机传感器新一代东风标致508L轴距加长近60mm,车身高度增加55mm, 车身长度增加120mm,带来了更加优越的空间表现。与此同时,还搭载人体工程学设计的“三位一体式”NAPPA座椅,使用4.2 ㎡的真皮,通过20道环保工艺雕琢而成,8个气囊启动,兼具5种按摩手法,越级而设的配置带来舒适尊贵的驾乘体验。
他拉着测量和机务班组分析换能器、姿态仪、主副天线和辅助传感器等仪器之间的几何关系,研究支架的长度和材质。4个月里,材质从角钢、镀锌铁管换到不锈钢方管;支架的长度从3米、2.7米再换到2.5米,多次改进后,终于研发出一款可拼接、适合任何船型的拆卸式连接器,让仪器长出了抓住船舷和站稳海底的“手脚”。
图像显示单独使用LCD取景或非“眼传感器模式 + LCD图像显示屏”取景拍摄后,设置LCD屏幕图像显示的时间长度,单张拍摄方便回放观看,如果退出需要半按快门或MENU按钮,高频率拍摄建议设置时长0.5秒或关,提高拍摄效率。
海豚作为一款小型车,在设计上就有着短车身长轴距的特点,车身长度4070mm,轴距已经达到了2700mm,最小转弯半径仅为5.25米,轻快灵活是其操控上的突出特点,这也让其在城市车流中穿梭显得轻松自如,而且在停车泊位的时候也很方便。
1. LED初始化/*****************************************************************************名称:InitLed()*功能:设置LED灯相应的IO口*入口参数:无*出口参数:无****************************************************************************/voidInitLed(void){P1DIR|=0x01;//P1.0定义为输出口LED1=0;}2. 初始化UART/*****************************************************************名称:InitUart()*功能:串口初始化函数*入口参数:无*出口参数:无*****************************************************************/voidInitUart(void){PERCFG=0x00;//外设控制寄存器USART0的IO位置:0为P0口位置1P0SEL=0x0c;//P0_2,P0_3用作串口(外设功能)P2DIR&=~0xC0;//P0优先作为UART0U0CSR|=0x80;//设置为UART方式U0GCR|=11;U0BAUD|=216;//波特率设为115200UTX0IF=0;//UART0TX中断标志初始置位0U0CSR|=0x40;//允许接收IEN0|=0x84;//开总中断允许接收中断}3. 串口发送函数/***********************************************************************名称:UartSendString()*功能:串口发送函数*入口参数:Data:发送缓冲区len:发送长度*出口参数:无***********************************************************************/voidUartSendString(char*Data,intlen){uinti;for(i=0;i<len;i++){U0DBUF=*Data++;while(UTX0IF==0);UTX0IF=0;}}4. 串口中断处理函数/***********************************************************************名称:UART0_ISR(void)串口中断处理函数*描述:当串口0产生接收中断,将收到的数据保存在RxBuf中**********************************************************************/#pragmavector=URX0_VECTOR__interruptvoidUART0_ISR(void){URX0IF=0;//清中断标志RxBuf=U0DBUF;}5. 烟雾传感器数据读取/*****************************************************************名称:myApp_ReadGasLevel()*功能:烟雾传感器数据读取*入口参数:无*出口参数:无*****************************************************************/uint16myApp_ReadGasLevel(void){uint16reading=0;/*Enablechannel*/ADCCFG|=0x80;/*writingtothisregisterstartstheextraconversion*/ADCCON3=0x87;/*Waitfortheconversiontobedone*/while(!(ADCCON1&0x80));/*Disablechannelafterdoneconversion*/ADCCFG&=(0x80^0xFF);/*Readtheresult*/reading=ADCH;reading|=(int16)(ADCH<<8);reading>>=8;return(reading);}6. LED灯控制函数/*****************************************************************名称:led_opt()*功能:LED灯控制函数*入口参数:RxData:接收到的指令flage:led的操作,点亮或者关闭*出口参数:无*****************************************************************/voidled_opt(charRxData[],unsignedcharflage){switch(RxData[1]){case1:LED1=(flage==DEV_ID_LED_ON)?ON:OFF;break;/*TBDforled2led3*/default:break;}return;}7. 主程序/*****************************************************************************主程序入口函数****************************************************************************/voidmain(void){CLKCONCMD&=~0x40;//设置系统时钟源为32MHZ晶振while(CLKCONSTA&0x40);//等待晶振稳定为32MCLKCONCMD&=~0x47;//设置系统主时钟频率为32MHZInitLed();//设置LED灯相应的IO口InitUart();//串口初始化函数UartState=UART0_RX;//串口0默认处于接收模式memset(RxData,0,SIZE);while(1){//接收状态if(UartState==UART0_RX){//读取数据,遇到字符'#'或者缓冲区字符数量超过4就设置UartState为CONTROL_DEV状态if(RxBuf!=0){//以'#'为结束符,一次最多接收4个字符if((RxBuf!='#')&&(count<4)){RxData[count++]=RxBuf;}else{//判断数据合法性,防止溢出if(count>=4){//计数清0count=0;//清空接收缓冲区memset(RxData,0,SIZE);}else{//进入发送状态UartState=CONTROL_DEV;}}RxBuf=0;}}//控制控制外设状态if(UartState==CONTROL_DEV){//判断接收的数据合法性//RxData[]:|device|data|crc|#|//check_crc:crc=device^data//if(RxData[2]==(RxData[0]^RxData[1])){switch(RxData[0]){caseDEV_ID_LED_ON:led_opt(RxData,DEV_ID_LED_ON);break;caseDEV_ID_LED_OFF:led_opt(RxData,DEV_ID_LED_OFF);break;caseDEV_ID_DELAY:break;caseDEV_ID_GAS:send_gas();break;default:break;}}UartState=UART0_RX;count=0;//清空接收缓冲区memset(RxData,0,SIZE);}}}四、 上位机功能函数结构体