P+F洗车机传感器模拟信号是利用电压,电流,相位,电阻等物理量来表征数值,一个端口一般对应一个参数,传感器线路直接和采集组件相连。DFDAU对所有模拟信号输入进行采样转为数字量,采样按照ARINC 573和ARINC 717定义的格式进行,这些模拟量转换为12位数字量。模拟量通过测量传感器的电压、电流或相位等得出参数的值,根据传感器电压、电流或相位等特性分为:低电平直流电、高压直流电、同步角等类型,常见的参数有:操纵舵面位置、驾驶杆位置、油门杆角度等。

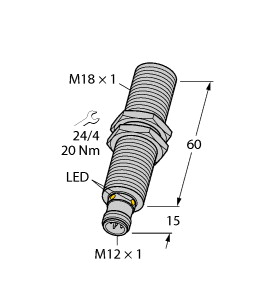
(P+F 超声波传感器 UC4000-30GM-2EP-IO-V15)
服务和过程数据 IO-link 接口,可通过带 PACTWARE 的 DTM 编程,2 路可编程的开关输出,可选声锥宽度,同步选项,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最小值 : 115 ms
出厂设置: 225 ms 非易失性存储器 : EEPROM 写循环 : 100000 绿色 LED : 常亮:通电
闪烁:待机模式或 IO-Link 通信 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 黄色 LED 2 : 常亮:物体在评估范围内
闪烁:学习功能,检测到物体 红色 LED : 红色常亮:错误
红色闪烁:程序功能,未检测到物体 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 60 mA 功耗 : ≤ 1 W 可用前的时间延迟 : ≤ 150 ms 接口类型 : IO-Link 协议 : IO-Link V1.0 传输速率 : 非周期性: 典型值 54 Bit/s 循环时间 : 最小 59,2 ms 模式 : COM 2 (38.4 kBaud) 过程数据位宽 : 16 位 SIO 模式支持 : 是 输入/输出类型 : 1 个同步连接,双向 同步频率 : 输出类型 : 2 路推挽式(4 合 1)输出,短路保护,反极性保护 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 2 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 1,5 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : EAC 符合性 : TR CU 020/2011
TR CU 037/2016 UL 认证 : cULus 认证,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 外壳直径 : 40 mm 防护等级 : IP67 材料 : 质量 : 95 g 输出 1 : 近开关点: 240 mm
远端开关点: 4000 mm
输出功能: 窗口 模式
输出特性: 常开触点 输出 2 : 近开关点: 500 mm
远端开关点: 2000 mm
输出功能: 窗口 模式
输出特性: 常开触点 光束宽度 : 宽
济宁洗车机传感器它在每个轴分布多余度位移传感器,用于敏感操纵杆的位移量,飞控专用的多余度惯性测量部件提供直升机的实时姿态角、三轴角速度、三轴加速度,主备导航系统提供实时航向角、地速,大气机和无高表实时测量直升机的空速、高度等状态信息,飞控系统根据位移传感器信号解算出指令信号作为前馈控制,飞控系统根据直升机当前状态与基准信号的偏差解算出控制信号进行反馈控制。前面提到波音MCAS增稳系统存在的四个方面问题,数字式电传飞控系统大部分都不存在的。
原厂洗车机传感器其次,F/A-XX隐身舰载机要高度信息化和人工智能化,有更多的自主操作、并能操纵无人机,与前出节点传感器高度融合。简而言之,F/A-XX隐身舰载机的整体作战性能必须比目前美国海军的F-35C隐身舰载机还要先进,以避免浪费昂贵的研制费用。
P+F洗车机传感器到2030年,荷兰计划实现智能航运常态化发展,越来越多的具备半自主功能(在部分航程实现自主导航,例如在VTS或限制区域外)、自主平台监视和控制。自动化的船舶在航行中使用各种传感器以及船载智能设备,辅以水路主管部门和其他船只的数据,获取航道信息、本船运动状态和周围视景影像,预测会遇态势并提供操纵建议给操作人员。大多数的船舶都配有智能预警系统,辅助船舶安全航行,部分航运船队在船员或者岸基控制中心的辅助下可以完成半自主航行。
济宁洗车机传感器机器人是由计算机控制的复杂机器,它具有类似人的肢体及感官功能;动作程序灵活;有一定程度的智能;在工作时可以不依赖人的操纵。机器人传感器在机器人的控制中起了非常重要的作用,正因为有了传感器,机器人才具备了类似人类的知觉功能和反应能力。
原厂洗车机传感器激光雷达产业的上游主要包括激光器、光学部件、探测器和信号处理电路。多家激光雷达厂商已开启垂直整合,加强激光器、光学操纵件、传感器和信号处理电路布局。1)激光器方面,根据近期半固态占主导的技术趋势判断,EEL将是应用最广泛的激光器,VCSEL上量主要取决于Flash激光雷达渗透。Yole预计到2026年,EEL在激光雷达领域的市场规模超过4亿美元,VCSEL在激光雷达和DMS领域的合计市场规模达到5700万美元。市场参与者方面,海外艾迈斯欧司朗、II-VI、Lumentum在EEL和VCSEL均有布局,国内企业包括瑞波光电子、纵慧芯光、炬光科技等。光纤激光器的渗透将主要取决于1550nm与FMCW技术的发展,海外公司如Lumibird,国内有昂纳科技、光库科技、海创光电等。2)光学组件为激光雷达必需品,可分为光束操纵件与常规件。光束操纵件定制化需求多,价值量较高,例如MEMS振镜;常规件价值量偏低,走量应用,例如透镜、窄带滤光片等。目前国内依靠光学元件切入激光雷达市场的上市公司较多,永新光学、舜宇光学、水晶光电等厂商均已开始向下游客户供货。3)探测器和信号处理电路技术壁垒高,预计价值量占比将随固态式发展进一步提高,目前该市场主要由海外厂商掌控,光电探测器厂商主要为滨松电子、安森美等,信号处理电路以TI、ADI、Xilinx为代表。
对孩子来说,这两件事至关重要:创造欲和成就感。机器人编程最大的优势是,很多孩子第一次接触时,都迫不及待地想要搭建一个专属自己的机器人,创造欲非常强烈。创客套件当孩子自己拥有创造欲时,才能驱动他自己主动去操作。搭建好机器人后,还要利用程序代码操纵机器人完成任务,这涉及编程基础知识、传感器知识、工程学知识等等。
编辑点评:Proscenic JOJO—T1的正面有三个按钮,分别是电源、干擦模式和湿拖模式的开关,操作起来轻松简便,即使上了年纪的妈妈辈应该也能操纵自如。按键下方是导航系统指示灯。底盘的设计也比较简单,比科沃斯-扫地机器人晶晶要简单的多。底盘上主要的组件为磁铁、地板过渡传感器、电池充电端口与驱动轮。驱动轮包裹了凹凸材质的防滑橡胶,以保证地面多水状态下不会打滑。
电传飞行控制系统取消了复杂的机械操纵和连接部件,所有控制指令和信号由电缆传输,在飞行员指令与舵面作动器直接设置计算机,飞行运动传感器为计算机提供飞机线运动和角运动相关参数信息,大气数据传感器为计算机提供高度和空速信息。系统采用多路时分串行数据传输方式,通过数字数据总线互相连接。
穿越机是FPV(第一人称)飞行器的一个特殊分支,相比航拍机它具备更强的机动性、可操纵性和观赏性且具有极高的飞行速度和加速度;在结构方面穿越机会相对航拍机简单很多,穿越机追求的是速度和灵活,因此不需要航拍机上的各类传感器(如视觉、红外、超声波、GPS等增强飞行安全性的传感器)所以穿越机的成本会比航拍机低许多。