P+F洗车机传感器为此,荣威iMAX8配备了可以提供全场景保护的智能辅助驾驶系统,硬件层面,它搭载了3个毫米波雷达、6个摄像头、12个超声波雷达,通过这些传感器实时辨别周边情况。智能辅助功能上,荣威iMAX8搭载AEB主动刹车系统,可在高达45km/h的车速下,完成识别后进行碰撞避免,还有RCTA后方十字交通报警、LKA车道保持辅助系统、LCA变道辅助等功能,最大限度的防患于未言。

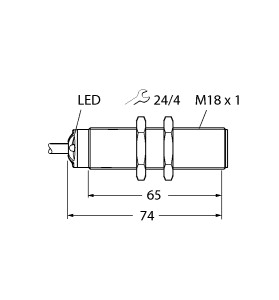
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
菏泽洗车机传感器由于工厂内部环境复杂,工业物联网在无线通信组网能力、高可靠性和实时性上的要求不断提高,这将是INPLAY未来重点攻克的技术方向。得益于蓝牙系统生态的迅猛发展,我相信蓝牙技术在工业和商业市场中未来潜力无限。蓝牙技术将在未来的主动式信标(Active RFID)和无线传感器节点的发展中发挥更多的作用。
含税运洗车机传感器五、深度解析 3D Sensing 摄像头产业链目前 TOF 或结构光的 3D 感知技术均为主动感知,因此 3D 摄像头产业链与传统摄像头 产业链相比主要新 增加红外光源、红外 传感器和光学组件等部分 。通过对已经上市的主 流 3D 摄像头产品进行拆解分析,3D 摄像头产业链可以被分为:
P+F洗车机传感器主动康复训练机器人的出发点是以患者自主运动/意愿为主,康复机器人为辅,基于患者的运动功能和运动能力为导向,促进患者达到随意运动的目的。为进一步促进主动康复训练机器人的应用效果,可以从提高人机交互的精准性、强化患者自主运动意愿、探索反馈刺激机理等方面入手。在人机交互方面,考虑到单一传感器获取人体运动意图存在不稳定性、精确度不高、迟滞等不利因素,可以考虑采用多传感器融合的形式,并通过机器学习策略增强运动意图的辨识。在运动意愿方面,由于患者存在肢体运动功能受损/废用导致神经通路难于形成闭环,需要设计更加灵活的训练方式,例如虚拟环境、任务游戏性、物理刺激诱发鼓励患者参与等角度强化患者自主参与康复训练的意愿。在反馈刺激机理方面,由于主动康复训练的意义在于促进运动知觉,即恢复对运动形态、运动幅度、本体感觉等方面的知觉,探索通过运动协同和感觉协同进一步促进主动康复训练对患者的有效反馈刺激。
菏泽洗车机传感器系统采用激光雷达为核心探测器,探测距离高达500米,有效弥补了视频监控、普通传感器在恶劣环境下的局限性。利用激光雷达主动防御的特性,结合高清视频监控技术,对误入高压线路3—5米内的目标进行定位、跟踪、警示、驱离,同时上传报警图片或视频到警务室进行处理。
含税运洗车机传感器 它的原理是传感器主动发出超声波到人体皮肤,然后接收反射回来的信号,利用指纹表面高低不平的纹理收集反射回来的超神波信号构建出3D指纹图像,再与已经储存的指纹信息做比对。所以当有水渍或污渍的时候,超声波指纹传感器比传统的电容指纹识别方式更灵敏。高通也宣称,3D Sonic Max可在干燥、潮湿甚至污染物暴露的各种条件下提供高性能的保护,与传统的解决方案相比,在手指潮湿时,它的处理速度更快。
来到机身的侧面,这里是石头G10 Plus的传感器区域,在机器人清洁过程中带来精准的避障和及时的回充。值得一提的是,这款石头G10 Plus在避障功能上特别采用了结构光主动测距避障技术,能够达到毫米级3D结构光测距,并且在红外光补光灯的加持下,机器人在黑暗环境下也能够识别避障。
电子稳定程序在车辆上设置了众多传感器,它们用于监测转向角度、横向加速度、偏航率等数据。电脑可以根据这些数据预判出失控的时机,及时纠正车辆的行驶状态。相较于ABS防抱死制动、EBD电子制动力分配、TCS牵引力控制等,电子稳定程序是更加全面的主动安全系统。
石头G10 Plus搭载了AI避障2.0技术,能够通过结构光主动测距,加以融合多传感器和AI算法,更聪明的规避障碍物。用户可以在该页面开启少碰撞模式,机器人在运行的过程中提前预知墙面及家具,减少正面碰撞,这更适用于在摆放易碎物品的房间使用。
在实际康复训练过程中,一部分的患者肢体具有一定的肌力,然而这部分肌力不足以克服自身肢体重力效应完成训练动作。此时,康复机器人可以采用模型主动补偿控制策略,即通过估计或辨识人体肢体的惯性质量、并通过康复机器人施加辅助力以克服患者自身肢体的重力影响,从而患者可以用自身残留的肌力完成康复任务。实际上,采用设备来部分平衡患者肢体的应用有着悠久的历史,目前可以在康复训练大厅看到外骨骼机械臂、悬吊系统等相关设备。美国加利福尼亚大学研究人员设计了一套上肢外骨骼系统,该系统使用了两个四连杆机构和弹性元件,可以平衡上肢手臂的重量,从而辅助患者完成上臂的伸展、拉伸等训练动作。日本的研究人员研制了一套绳索悬吊系统以辅助脑中风患者进行上肢训练,受试患者的特征是因运动功能受损不能自身完成自由空间的抬臂运动,该系统可以通过绳索末端的力传感器自适应地感知患者上肢重量的变化,并相应地驱动绳索系统抵消掉肢体承担的这一部分重力,进而指导患者依靠该系统进行上肢反复移动训练,最终患者的上肢运动能力(关节运动范围和肌力)得到了提升。