P+F洗车机传感器富士X-Pro2采用了X-Trans CMOS III传感器,这是富士最新一代传感器,像素从原来的1600万升级到了2430万,富士无反相机终于突破2000万像素级别了。同样采用像素不规则阵列的设计,因为非拜尔阵列的原因,所以产生摩尔纹的情况也减少,无低通滤镜的设计也是富士X-Trans CMOS传感器一直以来的设定。所以X-Pro2的成像表现在维持高画质和高锐度的同时,增加了像素值。谈不上非常大跨度的升级。但确实让X-Pro2在同级产品当中更有竞争力。

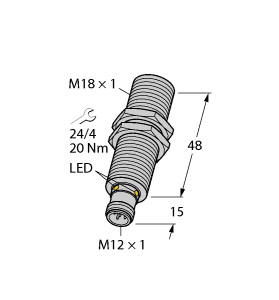
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
淄博洗车机传感器多年来,图像传感器都将像素阵列和逻辑电路集成于同一颗芯片。2012年,索尼推出了两层堆叠式图像传感器。芯片堆叠使厂商可以将传感功能和处理功能拆分到不同的芯片。这允许传感器具有更多功能,同时还可以减小管芯尺寸。
现货洗车机传感器机身正前方为集成了全向回充传感器和红外减速传感器模块(图中黑色部分)的碰撞缓冲器,其中红外减速传感器模块由6组分散排列的红外减速传感器组成光感减速阵列,每组传感器每秒50次实时检测前方障碍物,当检测到障碍物后会提前让机器人进行减速轻触,保护自身及家具安全。而当遇到窗帘及床上垂下的床单时机器人则会在减速的情况下换换通过,让这些边缘区域也得到清扫。
P+F洗车机传感器直到2009年,主流CMOS图像传感器均采用前照式(FSI)像素阵列结构。工作时,光线会照射到传感器正面。微透镜收集光并将其传输到彩色滤光镜。光穿过互连的堆叠并被二极管捕获。电荷在每个像素处被转换为电压,所有像素的信号被收集。
淄博洗车机传感器一目科技 CEO、世界最小μMFC 研发者李智强先生为到场会员们展示了他们公司的研发成果——基于微型传感器阵列的在线水质检测预警系统和微流体芯片。该产品由一目科技自主研发、台积电代工,可应用于智慧家居、智慧城市、医疗健康、智慧农业、水质监测、无创血糖传感器等产业,获得了第三届“创客广东”大赛企业组二等奖及最具人气奖。
现货洗车机传感器在晶圆代工厂中,图像传感器的制造流程有几种。其中一种简单制造流程中,像素阵列已完成。制备流程从对衬底的正面处理开始。晶圆与载片(carrier)或操作晶圆(handle wafer)键合在一起。对顶层进行注入工艺,再进行退火。在顶部涂上抗反射涂层,再完成彩色滤光片和微透镜阵列。在另一种简单制造流程中,对硅衬底表面进行注入。在顶部形成扩散阱和金属堆叠层。将晶圆翻转,在背面刻蚀出沟槽,在沟槽的侧壁进行隔离氧化层(liner)沉积并填充介电材料。最后在顶部完成滤光片和微透镜阵列。
1/1.18英寸感光面积,5000万原生高像素,单像素面积1.33um,支持四合一输出1250万像素,合成之后单像素面积2.66um,首发移动端RGBW阵列传感器,对比同等规格的RGGB传感器,进光量提升70%,对比华为独占的RYYB传感器,进光量提升35%,F1.85光圈,OIS光学防抖,23mm等效焦距,正常模式裁切至等效27mm焦距,高像素模式输出23mm焦距。
其它科技创新:微透镜阵列技术随着宝马“天使之翼”的搭载,可能成为视觉系统升级的下一个方向。我们认为,小尺寸,扁平化的解决方案更符合整车厂的全新设计理念。而对于已问世的OLED尾灯,激光辅助大灯系统,则仍需经过大规模工业化生产的检验,才能实现设计的不断提升以及使用成本的持续下降。我们注意到,随着微光学部件、光电系统产品在车灯产品上的应用,各头部企业的设计能力和生产工艺均得到了持续性提升,目前法雷奥、小糸等全球车灯巨头已经开始向激光雷达等精密光学传感部件进行探索,根据Yole的数据,法雷奥Scala激光雷达已搭载于奔驰、奥迪的多款量产车型,在全球ADAS激光雷达市场中占据28%的份额。我们认为,具备优秀设计及生产能力的国内车灯巨头有可能效仿国际巨头,向光学传感器领域布局。
在晶圆厂制作图像传感器有这样几种方法。例如像素阵列形成。流体从衬底上的一个正面过程开始,将晶圆片结合到载体或处理晶片上。上半部分经历了植入步骤,然后是退火过程。在顶部涂上一层抗反射涂层,彩色胶卷和微透镜就这样产生了。
Flash 为固态式非扫描成像,体积紧凑,主要缺陷为探测距离。与其他激光雷达扫描场景的方式不同,Flash 激光雷达类似照相机的工作模式,工作时激光脉冲经过光束扩散器形成宽发散激光束照亮整个视野,无运动扫 描部件,信号接收端包含一维或二维传感器阵列,每个像素收集 3D 信息。得益于紧凑型激光器阵列、探测器 阵列的发展,Flash 激光雷达逐步小型化,同时成本得到控制,Ouster 表示其 Flash 激光雷达单价低于 200 美元。 目前车载 Flash 激光雷达的主要缺陷在于探测距离较短(数十米),因此多用于短距或者盲区探测。