P+F洗车机传感器小分队一行参观了该公司研发中心、科创文化展区和部分生产线,技术人员详细介绍了公司定位、产品种类及应用场景。据悉,该公司为广东省专精特新企业,主要从事研发、制造、销售专用传感器、特种电缆等,产品广泛运用于石油化工、高端制造、轨道交通、新能源等行业。

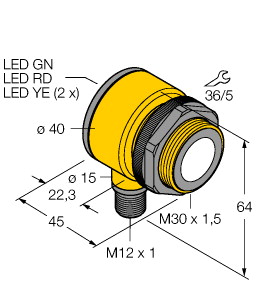
(P+F 超声波传感器 UC4000-30GM-E6R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,PNP,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
德州洗车机传感器中国拥有近4万公里高速铁路,高铁安全运行对路基、轨道、隧道、桥梁、边坡,供电和车辆等产生海量高性能多参数传感器及智能监测控制需求。中国的油气管道已达到近20万公里,也为分布式光纤传感器,移动激光气体巡检和遥测气体泄露传感器带来巨大需求。
原厂洗车机传感器近年来,随着物联网概念兴起,作为物联网的末梢神经,传感器越来越受到行业关注。对自动化、网络化、智能化要求越来越高的城市轨道交通行业,自然也不例外。城市轨道交通系统智能控制与智能决策的前提就是及时、准确地获取信息量。以高速列车为代表的先进城市轨道交通迈入智能化时代,传感器是必不可少的部件。传感器在轨道交通领域的应用场景包括收集列车的运行状态信息,集成化的高速综合检测列车,列车综合性能全面检测,钢轨探伤,轨道状态远程监测,室内外环境综合感知。
P+F洗车机传感器报名方式长按下图,识别二维码,即可浏览会议详情和在线报名参会。中南大学交通运输工程学院、南车株洲电力机车研究所的研究人员刘可安、田红旗、刘勇,在2015年第21期《电工技术学报》上撰文,提出基于牛顿运动模型的电动机瞬时速度观测器,采用传感器低速异步采样法进行脉冲时刻的精准定位和速度观测器的高精度实时反馈校正。为提高低速工况下瞬时速度观测精度,提出一种适合于轨道交通低开关频率应用场合的逆变器非线性模型误差补偿算法,并基于电动机本体方程提出一种能确保稳定性的次级电阻在线辨识算法。基于某地铁项目自主研发的直线电动机牵引控制系统进行实验验证,实验结果表明了所提算法的正确性和有效性。
德州洗车机传感器结合图3可以看出,在单侧行走梁接近首尾两端位置分别加装一个模拟量传感器,这两个模拟量接近传感器用来测量端梁相应侧与轨道之间的间隙,通过检测到的间隙大小信号传递至PLC,通过PLC内部一系列的运算来判断起重机的偏斜及横移状态,以改变变频器的输出速度,校正运行姿态。实现纠偏与校正横移的自动控制。
原厂洗车机传感器 测力拉压力称称重传感器产品应用广泛,目前被广泛应用于大吨位汽车衡、新能源,锂电池压装,轮道衡、料斗秤、地磅秤,料罐秤,撞击力测试,试验机,力值监控与测量、包装机、包装秤,材料试验机,机器人,皮带秤、电子秤、吊钩秤、医疗器材、码头货物计量、汽车衡、轨道衡天平、计价秤、计数秤、平台秤、建材、水泥化工工业现场重量控制及测量等多个行业领域。
经过分析,目的就是想车头过秤后不出现下称的判断。卸车部进车的车头节数和方向是固定的,所以就在程序中修订为车头进车后强制不下秤,这样就会自动的和后面的列车连接在一起。但随之而来的问题又出现了,车头来后会等待办理各种手续,停的时间较长,因为轨道衡有车称重后就会开始计数,因此在车头与后面车之间的这段波形会很长,即记录的点数很多,这样就会大大增加波形文件bx的大小,原来的一个文件只有1M多,而现在修改后变成10M多,这样就会大大占用电脑的储存空间,影响设备的工作效率。为此又再次对程序进行了修改,因为画一个图15那样的波形需要1000个点左右,现在将程序改成假如波形在2000个点一直没有变化,则就停止画波形,待传感器压力变化时再继续进行工作,这样就很明显减小了bx文件的大小,变成2M多,大大节省了电脑的储存空间。
旅行者号 即 旅行者号探测器 。 旅行者号探测器,是美国研制并建造的外层星系空间探测器,共发射两颗。原名“水手11号”和“水手12号”。旅行者2号和旅行者1号分别于1977年8月20日和9月5日发射升空。这两个姊妹探测器沿着两条不同的轨道飞行。担负探测太阳系外围行星的任务。旅行者1号与其姊妹船旅行者2号携带的钚电池(核动力电池)将持续到2025年左右。当电池耗尽之后,他们会停止工作,将继续向着银河系的中心前进。2012年8月中旬,研究学者表明“旅行者1号”将进入星际空间,35年共飞行178亿公里。2013年9月12日,美国宇航局NASA在本周四确认,“旅行者1号”探测器已经离开太阳系,到达太阳系外空旷的恒星际空间超过一年时间。 基本介绍 旅行者号探测器是1977年美国发射的两颗行星探测器。两颗探测器原来名称为“水手计划”的“水手11号”和“水手12号”。它们巧妙地利用巨行星的引力作用,使它们适时改变轨道,从而达到同时探测多颗行星及其卫星的目的。两探测器各重815千克,结构大体相同,带有宇宙射线传感器、等离子体传感器、磁强计、广角、窄角电视摄像仪、红外干涉仪等11种科学仪器,耗资3.5亿美元。1号发射前出现故障而延期,结果延至1977年9月5日发射,2号按预定计划在1977年8月20日发射。
工作过程:受动力机车牵引的连挂车辆,以一定的速度,进入轨道衡台面一侧的线路,经引轨驶进台面,车辆的重量通过轮轴或转向架加到主梁,压到传感器上,由传感器将重量信号转换为电压信号,经放大、滤波后送入A/D转换装置,将模拟信号转换为数字信号,通过计算机接口,送入计算机,再经过程序软件,进行数据处理,然后将称重的结果,在屏幕上显示和在打印机上打印出来。
秤梁设计主要从外形尺寸及刚度方面考虑。单台面轨道衡计量为转向架计量方式,即对某节车辆的每个转向架进行计量,最后再将各个转向架的重量进行累加便可得到该车辆的总重。由于我国货车车辆种类较多,为不造成车辆连状态下三轴上台,同时尽量为一个转向架在台面上留出足够的走行时间(检测计量要求越长越好),所以应当根据具体车型确定合适的秤梁长度,目前秤梁的长度一般采用3.7m。秤梁的刚度对整个系统非常重要,秤梁刚度不够,列车通过时秤梁变形明显,造成车辆上下振动,同时秤梁转角较大(传感器相当于秤梁的支点)都会影响列车计量的精度,只有秤梁满足一定的刚度条件(最大饶度fmax≤0·001L,L为秤梁长度)才能保证整个台面的稳定性,不影响轨道衡最终的计量精度。