P+F洗车机传感器高分辨率地图对于自动驾驶至关重要,并提供超出传感器能够监测的区域的信息。与当今导航设备的地图不同,它们由多个重叠层组成。定位层:无人车可以通过使用包含博世雷达道路签名和视频数据的定位图来确定其在车道中的位置,通过将传感器信息与高精地图匹配,可以确定相对这些物体的位置。规划层:规划层用于在自动驾驶(轨迹规划)期间规划路径与特定操作,还包含有关道路信息、交通标志、速度限制以及弯道与梯度的信息。例如,无人车可以使用规划层来决定何时变道。动态层:关于任何快速变化的交通情况(如交通堵塞,建筑工程和危险)或可用的停车位的信息都保存在动态层。

(P+F 超声波传感器 UC4000-30GM-IU-V1-HA)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,可调声功率和灵敏度,温度补偿,已通过 UL 认证,可用于 Class I/Div 2 环境
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
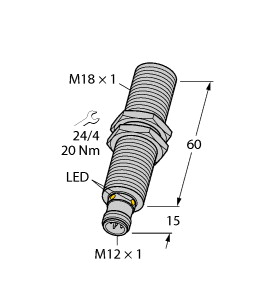
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : 标准 : EN 60947-5-2 UL 认证 : CSA 认证 : CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 缆线连接器 , M12 x 1 , 5 针 , 4 线 外壳直径 : 35 mm 防护等级 : IP65 材料 : 注意 : 单个组件:UC-4000-30GM-IUR2-V15;V1-G-2M-PVC;ADAPT-ALUM*-M30X1/2 NPT/HB****
莱芜洗车机传感器Rose协处理器将增加对惯性测量单元(IMU),蓝牙5.1功能,超宽带(UWB)和摄像机(包括运动捕捉和光学跟踪)传感器数据的支持,不仅可以分辨设备的位置,还可以融合传感器数据一起找到丢失的Apple标签,并帮助处理来自ARKit的人员遮挡。鉴于传感器数据收集和处理的重叠,Rose协处理器可以取代M系列运动协处理器。
订货洗车机传感器本研究提出了一种具有弯曲几何形状的大面积敏感软皮肤的开发,允许通过模块化贴片覆盖机器人全身。仿生皮肤由柔软的聚合物基质组成,类似于人类前臂,嵌入光子光纤布拉格光栅换能器,部分模仿 皮肤的机械感受器功能,具有漫反射、重叠的感受野。实施卷积神经网络深度学习算法和多网格神经元集成过程来解码光纤布拉格光栅传感器输出,以推断接触力大小和通过皮肤表面的定位。
P+F洗车机传感器2.天平量简各种表,江湖位高岂能少各类仪表是创设物理情境的常用道具,注意的是:近年部分仪表的更新换代,如:天平渐渐变为电子秤;建议备考时可挖掘一些仪表的新式使用或测量方法。3.电学考查多“变态”,尺度不大惹人爱近几年中考电学动态电路类试题的命题中并没有在“态”的识别上做太多文章,便于学生迅速进入单一状态的电路分析处理。4.电学测量综探究,细节控制让人忧涉及串联分压的细节分析,对学生的能力要求高。要把各种细节操作的原因目的都弄清、理顺,知其然,才能应万变。5.密度测量嵌浮力,误差分析多难题可挖掘的东西还很多,因利用浮力测密度的手段很多,涉及误差形成的因素也很多,浮力相关器材也很多,这一方向,简直就是-一个取之不尽的命题素材库。6.液面升降本就烦,再加弹簧难难难有没有涉及弹簧测力计的液面变化,其考查物理思维能力的价值区别并不大,但加上弹簧测力计后大大增加了解题的表达障碍。7.重叠切割变化大,列式分析图像化考固体压强的重叠和切割题有图像化趋势,同时应该注意数理结合。8.受力分析基本功,多数年份吼得凶单独的受力分析是解题基础,要重视,而情境理解是难点。9.电力综合确实好,命题情景不好找目前命题中采用较多的是利用传感器、压敏电阻等为背景的电路分析。10.四大考点八个题,排列组合勤分析二、中考试题中学生典型错误分析
莱芜洗车机传感器UWA3M UWA3M 数据库针对的是点云配准场景(即 2.5D 视角数据匹配)。其分别包含来自 Chef 、Chicken、T-rex以及 Parasaurolophus模型的 22、16、16和 21个视角的点云数据。这些数据由 Konica Minolta Vivid 910 Scanner 传感器对一个模型从不同视角扫描获得。该数据集的真值变换数据由首先利用手动标注然后运行迭代最近点法(iterative closest points, ICP)获得。B3R 和 UWAOR 数据集的真值变换数据由发布者提供。该数据集的干扰包括自遮挡和孔洞。由于基于局部特征的点云匹配方法要求待匹配数据具有一定的重叠区域,然而在该数据集中,并非任意两对点云都具有重叠部分。
订货洗车机传感器随着网络格局的演变,这种作战协同或网络战与电子战的融合将影响未来军事作战和民用的所有领域,包括空间作战和系统;定位、导航和授时系统等应用;无线网络、5G、物联网设备、智慧城市;关键基础设施(如电网和水库、银行和金融系统以及信息传输系统);军事通信系统;甚至无人机和海上交通工具。其中,物联网、人工智能和5G等两用技术的未来发展可能会为对手创造机会,破坏基于传感器的关键基础设施,或为“无处不在的ISR”创造有利环境。此外,还应注意,网络战和电子战与人工智能、量子计算和定向能等新兴技术重叠,并可能受到它们的直接影响。
a具有不同弯曲条件的CNA材料的PET基材的示意图和光学图。b d / L(得出的高度与设备尺寸之比)和可弯曲角度之比为2Δx/ L(阶跃距离与设备尺寸之比)。插图显示了具有不同弯曲条件的设备的重叠光学图。c在不同的弯曲条件下,各种材料对设备的敏感性。d具有各种弯曲圆的CNA设备的实时I–t曲线。e在不同弯曲条件下设备的电阻。f PET基产生的阻尼振动的示意图,其中基于CNA的传感器放置在其表面上。G基于CNA的传感器对阻尼振动的实时电流响应。h实时I–t曲线通过快速傅立叶变换(FFT)处理,这表明该阻尼振动的主频为〜5.5 Hz。i电流强度的极坐标发生变化。
深圳国珑智能科技有限公司代表侯玲发布了基于融合技术的三维嵌入式线激光传感器,该产品根据应用领域可以定制安装方式和特殊软件接口,融合技术适宜于多个三维线激光传感器同步实时采集数据,并将重叠激光线数据在不影响采集速度情况下无缝融合成一条激光线数据,其曝光技术解决了传感器在各种表面颜色、光泽、不同颜色和光泽混和情况下的物体测量在锂电新能源、机器人等领域有巨大应用潜力。
最后,研究者想将上述各项wFDCF技术应用到SARS-CoV-2检测中。呼吸道飞沫和气溶胶是呼吸道传染病的传播途径,但很难作为诊断手段。他们开发了一种可以检测呼出气溶胶中 SARS-CoV-2的口罩,实现对传统鼻咽采样的创新。口罩包括四个模块化组件:样品储存,样品收集垫,微流体分析装置(microfluidic paper-based analytical device,μPAD)和用来显示结果的横向流动(lateral flow assay ,LFA)条带。在咳嗽,说话与呼吸过程中,病毒会积聚在口罩内部【7】,毛细管作用将病毒颗粒从样品收集垫吸到μPAD上,通过冻干裂解提取RNA,逆转录-重组酶聚合酶扩增 (RT-RPA) 靶向扩增SARS-CoV-2 S 基因的非重叠区域,然后用SHERLOCK传感器检测扩增子。在存在SARS-CoV-2扩增子时,活化的 Cas12a 会切割荧光-DNA探针,在LFA上显示能用肉眼观察的条带。
首先我们还是对这三款传感器进行一个简单的介绍。2012年8月,索尼推出了IMX135堆栈式CMOS,全称为索尼Exmor RS IMX135,使用有信号处理电路的芯片替代了传统背照式CMOS图像传感器中的支持基板,在芯片上重叠形成被罩CMOS元件的像素部分,实现了在较小的芯片尺寸上形成大量像素点的工艺。堆栈式CMOS将电路组件放置在了感光组件的下方,因此在性能提升的同时减小了体积。