P+F洗车机传感器总投资12.1亿元的燕郊科技商贸物流港项目也在加速推进,目前正进行物流配送中心和物流仓储用房建设,已完成整体进度的80%。该项目主打智能物流,即将条形码、传感器、全球定位系统等先进的物联网技术广泛应用于物流业运输、仓储、配送、包装、卸货等各环节,实现货物运输过程的自动化运作和高效率优化管理。项目建成后,将为三河及周边地区企业提供科技创新平台、国际贸易平台,带动相关产业链发展,为区域经济发展注入新动能。

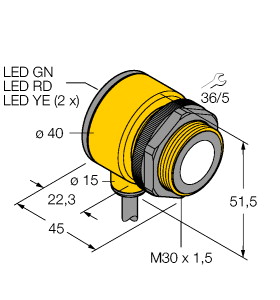
(P+F 超声波传感器 UC4000-30GM-E7R2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,2 路可编程的开关输出,迟滞模式可选,可选窗口模式,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:开关状态开关输出 1
闪烁:程序功能 黄色 LED 2 : 常亮:开关状态开关输出 2
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 开关点编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 空载电流 : ≤ 50 mA 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 2 路开关输出,NPN,常开/常闭,可编程 额定工作电流 : 200 mA ,短路/过载保护 电压降 : ≤ 2,5 V 重复精度 : ≤ 0,1 % 满量程值 开关频率 : ≤ 1 Hz 范围迟滞 : 调节后工作范围的 1%(默认设置),可编程 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 180 g
威海洗车机传感器如图所示:驱动结构方面,车子安装了两个较大的无刷电机以及一个控制龙头的舵机,用于驱动车子运动并保持静止和运动时的平衡。传感器方面,车子搭载了一个 RGBD 的深度相机、加速计、陀螺仪以及一个激光雷达,用于探测周围环境和车的状况;动力方面,电池使用的是 6S 的航模动力锂电池(续航 2~3 小时);控制方面,座椅的后方搭载了主控计算模块。
样本洗车机传感器握力真的能提供这么多信息吗?IBM的研究人员认为,握力对于多种健康问题都是一个有用的度量标准。例如帕金森病药物治疗的有效性、精神分裂症患者的认知功能程度和老年病学的死亡率等。握力数据经传感器发送到应用程序中,系统对其进行快速分析。研究人员说:“我们的系统由应变仪和小型计算机组成,它可以采集应变值和加速度计数据,并与智能手表通信。”《硅谷之角》杂志的报道也印证了这一说法,并且给予了较高评价:监测设备的有趣之处在于,智能手表使用了IBM专门开发的人工智能算法进行数据处理。这就是IBM这款设备的精髓——利用分析和机器学习识别握力、颤抖和其他症状的模式。从本质上说,这为研究人员打开了一扇了解个人大脑和身体运转情况的窗口。《硅谷之角》还表示,IBM的系统非常精确,它能够识别异常动作,并区分不同活动。
P+F洗车机传感器首先对机油压力开关三根线进行测量,一根电源5V,一个搭铁,一个信号,使用万用表在测量信号的过程中,不管在拔下插头或者断开插头始终为0.72V不变化,电源以及搭铁正常,怀疑机油压力问题,拆卸机油压力传感器接机油压力表,在发动机着车状态下加速和减速机油压力表可以跟随发动机的转速变化而变化,说明机油压力在正常范围内,更换两个机油压力传感器故障未排除!
威海洗车机传感器CorSens心脏监测仪记录心脏收缩产生的振动波形并传输到胸壁,测量心脏跳动周期。通过排列在患者胸部的一系列声学、加速度计和心律非侵入式传感器来检测心脏收缩参数。提供对心脏活动的持续监测结果,并评估患者的心脏节律状况。连续监测对于检测心肌梗塞至关重要,快速检测对患者的生存至关重要。
样本洗车机传感器“2017年10月,西人马在泉州顺利完成全新8英寸并向下兼容6英寸的MEMS生产线和高端传感器封测线的建设,拥有超过6000平方米的高等级洁净车间,采用全新的厂房设计和先进的MEMS生产设备,打造了国内先进的MEMS器件加工平台。” 西人马产品总监陶涛介绍:“有基于此,西人马产品和系统内的加速度、压力和温度传感器从材料到芯片,都是我们自己研发、设计并完成生产,拥有完整的自主知识产权,所有的关键材料和制造工艺都掌握在我们自己手中。”
Raspberry Pi基金会(Raspberry PiFoundation)设计的Sense HAT是专为英国ESA航天员Tim Peake首次前进国际太空站(ISS)的任务而打造的(AstroPi)。这是一款配备扩充传感器套件的Pi (1/2/3),包括陀螺仪、加速度计、磁力计、温度、气压和湿度等传感器。它还包括一个8×8 RGB LED矩阵、一个5键操纵杆,而且可以使用Python编程。在该基金会的项目网页上甚至提供免费的AstroPi工具库。
PDR是一种应用于行人导航的推算方法,利用惯性传感器检测出的位置数据信息解算出相应的步长和航向角,再根据行人的初始位置推算出行人在室内的踪迹[16]。假设行人初始位置为A1(x1, y1),沿着θ1方向移动距离S1到达A2(x2, y2),则从A1(x1, y1)到A2(x2, y2)的推算方程为(5)该算法主要有3个核心要素,分别为步频检测、步长估计和方向推算。(1) 步频检测。行人行走时的步频可利用加速度传感器进行检测,通常使用波峰检测法对数据进行处理,对检测到的数据进行滤波,检测是否为峰值。若是,则计算最大值与最小值之间的物理差和时间差是否满足阈值。若该峰值满足条件,则判定行人前进;若不满足则判定该数据为噪声。(2) 步长估计。步长指同一只脚从离开地面到再次接触地面时所迈过的长度。每个人的步长与其走路习性、身高状况及所处环境均息息相关。非线性步长估计是目前较成熟的步长估计法,其算法较简单、稳定性高。具体公式为(6)式中,S为待计算的步长;a为步行加速度值;k为常数。(3) 方向推算。计算行人位置不仅需要已知步长,还需要知道步行的方向。利用姿态传感器测出行驶轨迹的角速度和磁场,以期确定行人行走的方向和改变量。航向推算模型方向推算具体公式为(7)式中,θk为所求k时刻的航向值;θk-1为k-1时刻的航向值;ΔT为数据采集的间隔时间;ω为角速度。
值得注意的是,目前业内城市导航辅助驾驶系统主要有两个流派:一是以小鹏汽车等国内厂商使用的“激光雷达等多传感器融合 + 高精地图”路线;另一个是自动驾驶科技公司毫末智行所提出的“重感知、轻地图”路线。目前,这两个流派正并驾齐驱,加速布局城市导航辅助驾驶系统。
为了测量加速度,我们需要“三轴加速度计”传感器。它可以精确测量加速度。但加速度计本身不足以计算车辆的位置和速度。加速度计根据车辆的坐标系记录测量结果,而后这些测量值被转换成世界坐标系,为了实现这种转换我们需要借助“陀螺仪”传感器。三轴陀螺仪的三个外部平衡环一直在旋转,但在三轴陀螺仪中的旋转轴始终固定在世界坐标系中,车辆通过测量旋转轴和三个外部平衡环的相对位置来计算其在坐标系中的位置。