P+F洗车机传感器热车难启动指冷启动正常,热启动困难,甚至不能起动。热启动困难的原因有冷却液温度传感器故障,进气温度传感器故障,几个喷油器漏油或严重雾化不良,冷启动喷油器故障怠速阀,油压高点火故障等根本愿因是混合气过浓。

(P+F 超声波传感器 UC4000-30GM-IUR2-V15)
参数化接口,用于通过服务程序 ULTRA 3000 根据具体应用调整传感器设置,模拟电流和电压输出,同步选项,可调声功率和灵敏度,温度补偿
感应范围 : 200 ... 4000 mm 调整范围 : 240 ... 4000 mm 死区 : 0 ... 200 mm 标准目标板 : 100 mm x 100 mm 换能器频率 : 大约 85 kHz 响应延迟 : 最短 145 ms
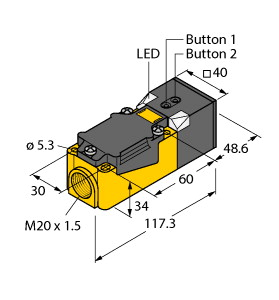
440 ms,出厂设置 绿色 LED : 常亮:通电
闪烁:待机模式或程序功能检测到物体 黄色 LED 1 : 常亮:物体在评估范围内
闪烁:程序功能 黄色 LED 2 : 常亮:在检测范围内有物体时
闪烁:程序功能 红色 LED : 常亮:温度/编程插头未连接
闪烁:发生故障或编程功能没有检测到物体 温度/示教连接器 : 温度补偿 , 评估范围编程 , 输出功能设置 工作电压 : 10 ... 30 V DC ,纹波 10 %SS 功耗 : ≤ 900 mW 可用前的时间延迟 : ≤ 500 ms 接口类型 : RS 232, 9600 Bit/s , 无奇偶校验,8 个数据位,1 个停止位 同步 : 双向
0 电平 -UB...+1 V
1 电平:+4 V...+UB
输入阻抗:> 12 KOhm
同步脉冲:≥ 100 µs,同步脉冲间歇时间:≥ 2 ms 同步频率 : 输出类型 : 1 路电流输出 4 ...20 mA
1 路电压输出 0 ...10 V 分辨率 : 评估范围 [mm]/4000,但是 ≥ 0,35 mm 特性曲线的偏差 : ≤ 0,2 % 满量程值 重复精度 : ≤ 0,1 % 满量程值 负载阻抗 : 电流输出: ≤ 500 Ohm
电压输出: ≥ 1000 Ohm 温度影响 : ≤ 2 满量程值的 %(带温度补偿)
≤ 0.2%/K(无温度补偿) 符合标准 : UL 认证 : cULus 认证,一般用途 CSA 认证 : 通过 cCSAus 认证,一般用途 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -25 ... 70 °C (-13 ... 158 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 5 针 防护等级 : IP65 材料 : 质量 : 210 g 输出 : 评估极限 A1: 500 mm
评估极限 A2: 4000 mm
上升斜坡
烟台洗车机传感器毫米波雷达的优势主要为以下3 个方面:1)探测性能稳定、作用距离较长、环境适 用性好。2)与超声波雷达相比,体积小、质量轻和空间分辨率高的特点。3)与光 学传感器相比,毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候全天时的特点。 但也存在着成本较高,对行人的识别较为困难等不足之处。
现货洗车机传感器(1)涡街流量计的测量范围较大,一般10:1,但测量下限受许多因素限制:Re>10000是涡街流量计工作的ZUI基本条件,除此以外,它还受旋涡能量的限制,介质流速较低,则旋涡的强度、旋转速度也低,难以引起传感元件产生响应信号,旋涡频率f也小,还会使信号处理发生困难。测量上限则受传感器的频率响应(如磁敏式一般不超过400Hz)和电路的频率限制,因此设计时一定要对流速范围进行计算、核算,根据流体的流速进行选择。使用现场环境条件复杂,选型时除注意环境温度、湿度、气氛等条件外,还要考虑电磁干扰。在强干扰如高压输电电站、大型整流所等场合,磁敏式、压电应力等仪表不能正常工作或不能准确测量。
P+F洗车机传感器热车难启动指冷启动正常,热启动困难,甚至不能起动。热启动困难的原因有冷却液温度传感器故障,进气温度传感器故障,几个喷油器漏油或严重雾化不良,冷启动喷油器故障怠速阀,油压高点火故障等根本愿因是混合气过浓。
烟台洗车机传感器光散射技术在整车上的前装应用,和室内家居场景完全不同,在技术上遇到了多种困难和挑战。首先,车舱内的空气环境更为复杂。室内家居环境如果长期开着净化器或者新风系统,通过HEPA等过滤后,只要不是在雾霾天经常开窗通风,一般室内环境比较洁净,大颗粒不多,1μm以下的小粒子居多。这个时候其实PM2.5与PM1.0的数值是非常接近的,那么我们通过香烟进行传感器标定就合情合理,也有标准依据(GBT18801-2015使用红塔山1916品牌的香烟作为标准尘源)。但是车舱内的环境就完全不是这样,经常的开车窗、开汽车空调外循环都会把外界空气引入到车内,而国道、高速、地下车库、城市等不同道路上的环境粉尘构成均不同,存在较大差异,如果继续沿用室内家居的粉尘传感器,明显无法做到准确的尘源识别和测量。四方光电通过多年对光散射的技术积累和对应用场景的深入理解,开发出智能尘源识别算法(API算法),能够有效识别出车舱内的颗粒物构成,实现精准测量。
现货洗车机传感器1月23日,正值农历腊月二十九,大多数企业已停工、工作人员已返乡。此时新冠肺炎疫情呈现爆发态势,根据国家、省工信部门部署,青岛市工信局迅速在全市范围内开展红外测温仪生产企业摸排,经多次摸排,最终锁定了青岛雅世医疗器械有限公司(青岛三顺电子有限公司),这也是山东省唯一的手持红外线测温仪生产企业。按照国家、省、市关于疫情防控应急物资生产保供有关要求,雅世医疗公司生产的手持式红外测温仪将是防疫一线重要的保障物资。为此,市工信局多次与雅世医疗公司沟通,希望企业尽快恢复生产。企业负责人表示,当前复工复产存在诸多困难,一方面企业生产负责人和几个关键技术人员为武汉人,节前已返回武汉无法返工;另一方面手持式红外线测温仪产品生产所需的红外测温传感器、LCD屏、外壳等大部分关键配件来自于深圳,深圳供应企业处于停工状态,且配件库存被当地政府要求优先供应本地企业生产。
叶杰平,贝壳找房副总裁、首席科学家,智源研究员,密西根大学教授,IEEE Fellow、ACM杰出科学家。叶杰平博士主要从事机器学习、数据挖掘和大数据分析领域的研究,致力于推进人工智能技术在出行、居住和医疗等领域的应用。他曾获得KDD和ICML最佳论文奖,荣获2010年美国国家自然科学基金会生涯奖、2017年中国计算机学会“CCF科学技术奖科技进步卓越奖”、2019年度国际运筹学领域顶级实践奖--瓦格纳运筹学杰出实践奖(Daniel H. Wagner Prize)。叶杰平博士是2021智源大会强化学习与决策智能论坛的主席。本专题论坛将邀请国防科技大学智能科学技术系主任徐昕、美国密西根大学教授应雷、美国西北大学助理教授汪昭然、华为诺亚方舟决策推理实验室主任郝建业、滴滴AI Labs首席研究员秦志伟等知名嘉宾共同探讨相关领域面临的机遇和挑战。作为一种新兴技术,当前强化学习与决策智能仍面临大量挑战。接下来我们将从问题建模和算法设计两个层面分别介绍强化学习与智能决策亟待解决的挑战和前沿进展。1问题建模当前挑战:强化学习的奖励设计(描述学习目标)与状态定义(描述输入信号)不仅严重依赖于专家经验,且往往需要消耗大量人力反复调整建模方式。首先,奖励函数的设计极具挑战性。奖励函数是描述智能体目标的特殊信号,对决策算法习得的策略有决定性的影响。以超级马里奥游戏为例,直接以“过关”作为奖励,则引导智能体学习的奖励信号会过于稀疏(一关仅一个奖励信号),进而导致算法的学习效率极低,甚至无法学到过关的策略。而综合考虑其他因素,如存活时间、击杀怪物得分,收集金币的数量等,需要进行大量的试错来平衡不同因素在奖励函数中的权重,以避免智能体出现无意义刷分的行为。超级马里奥其次,状态空间的定义仍需领域专家耗费大量精力进行多次尝试。真实环境中的输入信息存在多模态,高维度的特点,需要针对特定任务选择相应的信息和特征提取方法以定义策略学习所需的状态。如在自动驾驶任务中,汽车的输入信号可以来自于摄像头、激光雷达、油量传感器、速度传感器、GPS信号等多种传感器。此外,行驶、停车入库,路线导航等不同的决策场景需要的信息存在差异。此时,为自动驾驶任务定义状态空间需要领域专家反复权衡不同决策场景的重要性、传感器成本、信息处理难度和策略学习难度等多种因素。前沿进展:1. 近年来,学界提出使用内在奖励(intrinsic reward)降低奖励函数设计时的人工成本。内在奖励启发自心理学中的内在动机(intrinsic motivation)。举例来说,婴儿仅受内在好奇心的驱动便会积极探索房间的各个区域,无需父母给出特定形式的外部奖励。类似地,我们可以在决策算法中引入类似于“好奇心”的内在驱动力。此时,我们只需设计简单的稀疏奖励,便能引导智能体学习到有意义的策略。OpenAI 提出随机网络蒸馏,鼓励智能体探索具有较高不确定的状态。该方法是首个不依赖人类经验,在《蒙特祖玛的复仇》(雅达利游戏中最困难的稀疏奖励任务之一)中超过人类玩家平均水平的智能算法。《蒙特祖玛的复仇》中的强化学习实践2. 为降低设计状态空间的成本,研究者尝试融合表示学习与强化学习,自动地从原始输入中提取低维的状态特征。具体地,可以选择廉价的传感器(如摄像头)获取原始输入,然后通过表示学习方法将高维的原始输入映射为低维的向量表示,同时保留原始状态中任务相关的语义信息。在机器人的仿真控制中,融合表示学习技术的决策算法可以在仅使用图像输入的情况下达到与使用多个不同传感器(获取关节速度与角度信息)时相当的性能。此外,针对视频游戏任务,David Ha与Juergen Schmidhube提出世界模型(World Models) 。该方法以游戏图像作为输入,结合了自监督学习、循环神经网络等多项表示学习技术来提升智能体对环境的理解。图灵奖得主Yann LeCun评价该方向是弥补强化学习不足与通向下一代人工智能的关键点。韩国科学技术院使用图神经网络学习能源网络的低维表示,进而使用强化学习方法学习能源网络的控制策略,获得了WCCI 2020电网调度大赛的冠军。 2算法设计当前挑战:主流的强化学习算法在设计时往往对环境和智能体进行了过分简化的假设,与真实场景下的落地应用仍有较大的距离。其一,现有算法常常假设智能体可以获知全部环境信息(即完全可观测),但在国防安全、智能制造等落地场景中,智能体往往只能获取决策所需信息的一部分(即部分可观测)。其二,现有算法主要考虑单一智能体或较小规模的多智能体系统。但是在物流调度、电网控制等重要决策任务中,存在庞大数量的智能体。值得一提的是,共享车辆调度任务作为强化学习方向最有潜力的落地场景之一(预计市场规模在2025年达到2180亿美元),需要同时考虑部分可观测性与庞大数量的智能体集群,对算法设计提出了更高的要求。前沿进展:得益于大规模强化学习训练技术的发展,近年来在上述复杂场景下的强化学习算法已经取得了一系列令人瞩目的成就。例如,在棋牌对弈领域,以AlphaZero、MuZero为代表的棋类游戏算法将深度强化学习与蒙特卡洛树搜索、自博弈等技术结合,战胜了围棋领域的人类世界冠军,实现了强化学习在双人博弈问题上的落地应用;在竞技游戏领域,AlphaStar在游戏《星际争霸》中克服了状态观测不完全、实时决策、稀疏奖励等诸多难点,OpenAI Five在游戏《Dota 2》中实现了多智能体场景下的协作和竞争,这些游戏算法应用大规模强化学习训练技术,达到了匹敌人类顶级职业选手的表现。针对共享车辆调度任务,滴滴提出了一种新的基于深度强化学习与半马尔科夫决策过程的智能派单方法,在同时考虑时间与空间的长期优化目标的基础上利用深度神经网络进行更准确有效的价值估计。通过系统的离线模拟实验以及在线的AB实验证明,这种基于深度强化学习的派单算法能够显著提升平台各项效率及用户体验。 赠书福利
大众POLO自动变速箱无法提速维修车辆信息:2011年POLO 1.6 6速手自一体,搭载爱信09G变速箱。 故障描述:车子跑了一趟高速600多公里,下高速交完费再加油提速就很困难,转速表3000转,车速跑到40,感觉发动机在空转,4挡往上升不上去,也没敢继续踩油门。靠边停车半个小时,启动打火仪表盘亮起故障灯,前进档可以跑100多米,倒挡没反应。 故障分析:车子年限长,公里数不高,跑11万多。师傅通过试车,用专检设备读故障码、数据流发现换挡严重冲击,有打滑迹象,报故障代码:P0721变速箱输出转速传感器,不可信信号;O1192 锁止偶合器耦合。 建议维修方案:检测了大概半个多小时,报了一下维修方案和价格,承诺打开变速箱后不存在二次加价和隐藏费用了,签好维修协议,放在这里维修了 客户到店后描述:网上搜介绍比较正规,全国40多家分公司,所以直接联系拖车过去了。问了一下变速箱坏了有什么症状,师傅告诉我之前3挡升4挡不顺畅也是变速箱故障的表现。 从车上抬下变速箱,
尽管笔者还没有看到麦格纳OMS后视镜的技术参数,但初步判断它很可能结合了OmniVision的CMOS图像传感器(可能是2MP OV2311)与赛灵思的FPGA(Zynq-7000或UltraScale+MPSoC)来实现高性能、高能效的图像处理,以及Seeing Machines的OMS软件乘员监控软件。由于Euro-NCAP等机构和‘欧洲通用安全条例’等法规的出台,要求OEM采用能够可靠地监控驾驶员注意力、困倦和伤害的技术,因此DMS/OMS的出货量在未来十年中将急剧增长。这甚至适用于低成本、经济型车型,无论车辆是否具有可脱手功能(例如通用的SuperCruise或福特的BlueCruise),它们都使用基于视觉的DMS来准确评估驾驶员的参与度。对于OEM来说,在座舱内安装红外光学组件是一个困难但却关键的决定,对于Tier 1而言是一项复杂的工程挑战。当前的DMS通常图像传感器位于转向柱(凯迪拉克CT6)、组合仪表(宝马X5)或中控台(斯巴鲁Forester)上。对于OEM来说,集成必要的IR光学组件和相关电子设备的最简单、最快和最具成本效益的位置就是后视镜。由于Euro-NCAP计划在2023年或2024年将DMS/OMS测试纳入到其5星安全评级,因此麦格纳最近推出了完全集成的OMS后视镜,这确实很重要。特斯拉的座舱内摄像头特斯拉前不久被发现,它或许试图改变在Model 3和Model Y中安装的内部摄像头的用途,提供DMS/OMS功能。在此视频中,我们可以看到更多的进展,特别是可以发现驾驶员状态分类器的噪点有多大,系统很容易就会被一张照片欺骗。
上坡辅助:上坡辅助(Hill-start Assist Control)是为防止车辆在上坡时起步困难,行车电子系统在上坡起步放开刹车准备踩油门的时候对四个车轮施加短暂几秒钟的制动以阻止车辆下滑。这样会使得驾驶员在上坡的过程中不至于手忙脚乱和溜车事故发生。与自动驻车不同上坡辅助由于是行车电脑以及电子传感器集成系统,座椅在车内没有开关,是在行车程序里面默认开启的,也就是如果电子稳定控制系统没有关闭的话,上坡辅助就是开启的。在车辆有上坡辅助这项配置的前提下,上坡辅助的生效条件是: