P+F接近开关2.初步检测遮挡物是否为面部。泛光感应元件-垂直腔面发射激光器(VCSEL)会发射低功率红外光,对前方物体进行扫描,面部正在扫描时的红外光可以由红外镜头检测并接收信息,接收到的信息传给A11芯片神经网络系统进行判断,识别为脸部后,就完成了初步的面部识别,如果检测确认是面部会继续下面的流程。

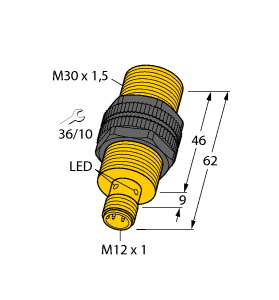
(P+F 电感式传感器 NBN12-18GM50-E0-V1-M)
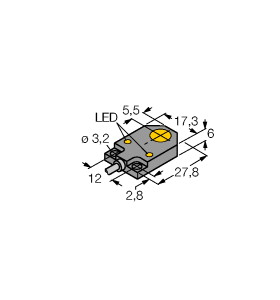
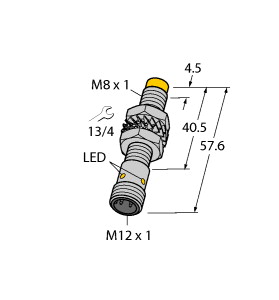
12 mm,非齐平,温度范围扩大
-40 ... +85 °C,E1 型式批准,抗扰度提高至 100 V/m,密封性增强,防护等级
IP68 / IP69K,出色的耐冲击和防振性能
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,4 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 5 ... 60 V 开关频率 : 0 ... 1500 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 感应过电压保护 : 是 浪涌抑制 : 是 电压降 : ≤ 2 V 额定绝缘电压 : 60 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 0,1 µA 在 25 °C 时 空载电流 : ≤ 7 mA 可用前的时间延迟 : ≤ 220 ms 开关状态指示灯 : 黄色多孔 LED MTTFd : 1085,5 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证,一般用途,2 类电源 CSA 认证 : 通过 cCSAus 认证,通用,2 类电源 CCC 认证 : 通过中国强制性产品认证 (CCC) E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 3 针 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 质量 : 46 g
济南接近开关Atlas身体内部以及腿部的传感器通过采集位姿数据使其保持身体平衡,它头上的激光雷达定位器和立体摄像机可以使Atlas规避障碍物、探测地面状况以及完成巡航任务。这版的Atlas高1.75米,重82千克,均比上一版的高1.88米,重156千克在轻便上有所提升。在搬箱子、出门推门等过程中还需要标记点完成物体识别任务,对物体的识别等机器视觉能力有待提升。
中国接近开关天文历法在上古时代就有了,《太乙金镜式经》中记载:“昔燧人氏仰观斗极而定方名,东、西、南、北也。”燧人氏被后人尊为三皇之一,他依靠观察北斗星定东、西、南、北方向,并且制定了原始历法,标志着观天定时走向人类的生活。人类从采集渔猎生活走向农耕,推动了天文学的产生和发展。因为农耕急需解决的是何时种植、何时收获,人类因需要而探索,在观天中找到了答案。太阳初升到落山定为一天,月亮由缺到圆定为一个月,北斗星的斗位转化,一个周期定为一年。苍茫天际斗转星移,探寻天体的运行规律,找到了春夏秋冬四季变换。人类根据太阳照射地面物体的影子变化,找到了一种计时的方法——日晷。掌握了制定时间、方位、季节的知识,促进了农耕文明的发展,人类得以生存繁衍。
P+F接近开关Atlas身体内部以及腿部的传感器通过采集位姿数据使其保持身体平衡,它头上的激光雷达定位器和立体摄像机可以使Atlas规避障碍物、探测地面状况以及完成巡航任务。这版的Atlas高1.75米,重82千克,均比上一版的高1.88米,重156千克在轻便上有所提升。在搬箱子、出门推门等过程中还需要标记点完成物体识别任务,对物体的识别等机器视觉能力有待提升。
济南接近开关 甲方责任 对乙方提交的深化图纸及样品进行确认;提供施工所需水源点及电源点(并安装总表)、电讯线路,并保证施工期间的需要;提供施工现场道路与公共道路的通道,满足施工运输的要求,保证施工期间的畅通;提供乙方为施工而建造的临时生产所需之场地;会同设计单位组织施工前设计交底;负责按合同条款协调施工及支付款项;及时发出必要的指令、确认和批准;有权在任何时候提出更换甲方认为不合要求的乙方施工管理人员及施工人员;如有设计变更或重大修改,在单项工程该部位施工前14天书面通知乙方;合同条款中规定的其他责任。 乙方责任 根据工期、图纸和施工现场条件编制切实可行的施工组织设计(或专项施工方案),在协议签订后14日内报总监理工程师和甲方审批;严格按照批准的施工组织设计(或方案)进行施工,随时接受甲方和监理的监督检查并按要求和指令纠正出现的偏差。按时向甲方提交隐蔽工程验收报告、质量自检记录、交工验收报告、工程事故报告,并提交三套竣工报告等资料。参加施工协调和工作例会,服从甲方现场总协调作出的决定。应为甲方组织的现场参观,以及甲方与监理单位的开展工作提供便利。乙方负责按合同要求完成所有工程量,并对其承包范围及责任区内要求保持场地整洁,做到随时派专人负责清洁卫生;对甲方现场产品予以保护,如因乙方原因造成损坏,由乙方负责修复,费用由乙方承担;乙方现场管理人员要服从甲方代表指挥;若不能符合甲方要求,由甲方指定专人开展清洁工作,乙方承担相应的费用。乙方应对施工区域周边的地上地下管线、地面房屋、道路进行保护,不损坏其功能。乙方要严格服从甲方及监理工程师的管理,严格执行甲方及监理工程师的规定、指示和指令,包括依照甲方要求的时间、格式和内容提交各类报表、计划、方案、措施、记录、名单、证明、协议等文件或资料,按照甲方要求出席召集的会议。服从现场总承包商的协调和管理,按照甲方和监理单位提出的指令执行各项工作。自行协调与土建安装单位及其他施工方的配合问题,确有必要时可要求甲方出面协调。 不可抗力 不可抗力包括因战争、动乱、空中飞行物体坠落或其他非甲方乙方责任造成的爆炸、火灾,以及应以国家和本市有关主管部门正式发布为准的风雨、雪、洪、震等自然灾害。不可抗力发生后,乙方应迅速采取措施,尽力减少损失,并在二十四小时内向甲方代表通报受害情况,灾害继续发生,乙方应每隔十天向甲方报告一次灾害情况,直到灾害结束。甲方应对灾害处理提供必要条件。因灾害发生的费用甲、乙双方分别承担: 工程本身的损害由甲方承担;人员伤亡由其所属单位负责,并承担相应费用;造成乙方设备、机械的损坏及停工等损失,由乙方承担;所需清理修复工作的责任费用的承担,双方另签补充协议约定。 工程停建或缓建 由于国家政策或不可抗力等原因,非甲、乙方不作为所导致的工程停建或缓建,双方均不算违约,双方应承担各自的损失。甲方应对乙方已完工程量进行结算,乙方不得将未完工作量向甲方索赔。对乙方采购的设备材料,已经安装的,甲方予以认可,未安装的,由乙方自行处理。 材料与设备的采购 乙方按照设计和规范要求采购工程需要的己方供应材料设备,并提供产品合格证明,提供相应的证明文件。在材料设备到货二十四小时前通知甲方代表验收。违约责任: 乙供材料设备到达施工现场前,乙方应提前48小时通知甲方和监理工程师参加验收。甲方或监理工程师不能按时参加验收,应向乙方提出延期要求。延期要求不应影响正常施工,若造成工期延误的,相应顺延工期。对乙方采购材料设备与设计和规范要求以及甲方事先确认(指定)意见不符的产品,甲方代表拒绝验收,由乙方按甲方代表要求的时间运出施工现场,重新采购符合要求的产品,承担由此发生的费用,工期不予顺延;工程中间验收或竣工验收时,发现乙供材料设备不符合规范和设计要求或不符合甲方事先的确认(指定)意见,由乙方修复或拆除及重新采购,并承担发生的费用,赔偿甲方的损失。由此延误的工期不能顺延。 质量检查和返工 检查和返工。乙方应认真按照标准、规范和设计要求以及甲方代表依据合同发出的指令施工,随时接受甲方代表及其委派人员的检查检验、为检查检验提供便利条件,并按甲方代表及委派人员的要求返工、修改,承担由自身原因导致返工、修改的费用。 隐蔽工程和中间验收 工程具备覆盖、掩盖条件或达到协议条款约定的中间验收部位,乙方自检合格后,验收前四十八小时通知甲方代表检验,乙方准备验收记录,包括隐蔽和中间验收的内容、验收时间和地点。甲方代表在验收记录上签字后,方可进行隐蔽和继续施工。验收不合格,乙方在限定时间内修改后重新验收。工程质量符合规范要求,验收二十四小时后,甲方代表不在验收记录签字,可视为甲方代表已经批准,乙方可进行隐蔽或继续施工。甲方代表或工程师在接到乙方隐蔽工程或中间验收的通知后,不能按时进行验收,应向乙方提出延期要求,延期不能超过48小时。 竣工与竣工验收 工程具备竣工条件,乙方应向甲方提交竣工报告及3套完整的竣工蓝图(包括1套电子版,甲方为此提供最初施工图纸的电子版)和竣工资料。乙方提交竣工验收保护后,由甲方组织验收,验收合格后,乙方提交竣工报告之日为竣工日期。若验收不合格,则乙方返工时间做为工期累计。乙方向甲方申请组织验收的任何请求必须至少在7天前以书面提出,工程验收合格需符合以下条件:
中国接近开关3.点阵投影器发射结构光建立3D人脸信息。垂直腔面发射激光器发出的只是简单红外光,不能显示立体面部信息,点阵投影器发射的高功率红外结构光(结构光一般指呈条纹状或者点阵状的特殊光线),这种光线在打到凹凸不平的物体表面时会造成图像扭曲,从而获得物体的空间深度信息。
1、容易受到动物体温辐射、阳光照射、热气流温度辐射等多种因素干扰而引发误报警;2、当气温与人体温度接近或高于人体温度时,这一类探测器将根本无法正常工作。因以上技术层面上的原因,所以被动式红外探测器相对于主动式红外对射探测网较容易产生误报与漏报。
由于 3 mm的雷达具有极高的分辨率和精度,常常可以在飞机跑道两侧放置用来检测跑道及跑道周围的微小异物、鸟以及其他易被飞机发动机吸入从而对飞机飞行存在安全隐患的各种动物。如果在所有的军民用机场部署,将大大提高飞机起降的安全性。且 3 毫米雷达较目前国外安装的微波和 8 毫米雷达而言,体积很小,很轻,能够探测更细微的物体,便于快速安装和部署。
工作原理1、伺服系统(servo mechanism)是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移。
非标路况、行人、环境需要差异化算法。不同场景决定了自动驾驶各个子赛道的技术差异,这在数据和算法上尤为显著。Robotaxi场景集中在城市快速路和高速公路,主要面对车流,追求乘客安全舒适的乘坐体验;Robotruck场景则集中在高速公路上,由于高速和载重大的特点,更加追求极限感知,进而预留出反应时间;而无人配送则集中在非标道路上,主要运行的区域为非机动车道、小区、园区等多元化的场景,因此在自动驾驶算法中除了更关注额外的行人数据外,也需要大量的经验和工程化能力的积累,以更好地识别多种多样的场景、物体,从而更加有效地做决策。