P+F接近开关实际上,就已开展过试运行的商业案例来看,UAM与地面交通相比并无本质不同,前者只是在空间上增加了一个维度。因此,鉴于公交汽车不可能像私家车那样拉动整个汽车工业在全球范围迅猛发展,未来UAM更可能是一种自动公交系统与自驾/出租并存、融合的形态。首先,“集中式平台”提供的自动公交系统并不必然比有人类飞行员的自驾/出租载具更安全,指挥调度系统也会遭遇诸如指令错误、系统/通讯故障、网络攻击、人工智能失控以及人为误操作甚至蓄意破坏等风险,进而引发灾难性事故。况且,在充分考量人为因素(特别是人类自主的驾驶行为)的前提下,通过对UAM有关的服务、职责、信息架构、数据交换协议、软件功能、基础设施、性能等提出明确要求,从而对城市上空各类“不受控”(非集中操控)的飞行器进行安全的交通管理——这本是UAM真正投入运营的必要前提和关键环节,而并非可以通过“牺牲自由”(人类的驾驶自由)予以规避和省略的。随着技术进步,人类驾驶导致的事故风险完全可以通过增强人工智能辅助、优化人机界面、传感器融合增强态势感知、自动避撞、强制悬停/就近降落、“电子围栏”等手段减到最低直至完全消除,对于空中汽车的驾驶员来讲, 连“压实线”的可能性都没有,遑论闯灯、占道。未来城市里,尽管大大小小的飞行器在人们头顶到处飞,但坠机、碰撞的概率将远低于今天汽车相撞、冲出道路、冲上公交站台,而且飞行器会安静地让人几乎感受不到其存在,并且还可将大部分载具的飞行高度规定在100米以上,使之高于一般建筑物。

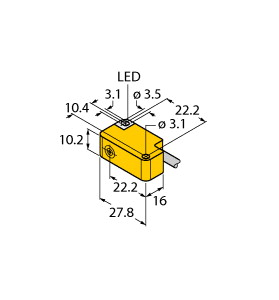
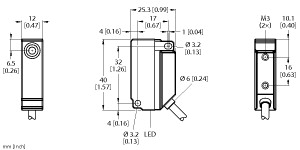
(P+F 电感式传感器 NBN12-18GM50-E0-3M)
12 mm,非齐平,更远的工作距离,温度范围扩大
-40 ... +85 °C,工作电压范围扩大,具有多种安装选择,使用灵活
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 驱动器件 : 软钢,如 1.0037、SR235JR(之前为 St37-2)
36 mm x 36 mm x 1 mm 衰减系数 rAl : 0,49 衰减系数 rCu : 0,46 衰减系数 r304 : 0,75 衰减系数 rBrass : 0,55 输出类型 : 3 线 工作电压 : 5 ... 36 V 开关频率 : 0 ... 1300 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 电压降 : ≤ 1 V 工作电流 : 0 ... 200 mA 断态电流 : 最大 20 µA 空载电流 : ≤ 10 mA 可用前的时间延迟 : ≤ 10 ms 开关状态指示灯 : 黄色 LED MTTFd : 1708 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % PWIS 符合性 : VDMA 24364-C1/T100°C-W 符合标准 : EAC 符合性 : TR CU 020/2011 防护等级 : II UL 认证 : cULus 认证,一般用途,2 类电源 CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 电缆 外壳材料 : 黄铜 , 白青铜 带涂层 感应面 : PBT , 绿色 防护等级 : IP68 电缆 : 质量 : 137 g 拧紧扭矩 : 0 ... 30 Nm 供货范围 : 供货范围包含 2 颗自锁螺母
菏泽接近开关特斯拉撞车事故后推送V8.0系统,强化毫米波雷达作用。2016年5月美国佛罗里达州一辆开启Autopilot模式的特斯拉与白色重型卡车相撞,导致特斯拉车主身亡(事故情况的具体分析见本报告5.1部分)。事故曝光后,特斯拉与其视觉识别系统供应商Mobileye终止合作(终止合作的具体分析见本报告2.5部分),并于9月份通过OTA推送了V8.0系统,强化毫米波雷达作用,将其提升成为主控制传感器。
资料接近开关局限就是它的自动驾驶系统架构有待更新。特斯拉曾发生多起重大事故涉及人员伤亡。比如强烈的阳光和全白的车身导致前向摄像头模块误以为前车车身是蓝天白云背景中的一部分。长距离雷达Radar系统成功探测到了前车形成的金属障碍物。但是长距离雷达模块误认前方的障碍物为路面上方的指示牌或横架。两个关键传感器的误判导致紧急刹车功能未能起效。而特斯拉的改进竟然走向纯视觉的方向,引发了行业或消费者的广泛担心。
P+F接近开关我们认为毫米波雷达的下一个方向就是高分辨的4D成像雷达。4D解释一下,4D是指目标探测的4个维度,包括它的速度、距离、水平角度、垂直高度。传统上毫米波雷达的测速和测距的能力非常好,但是它的水平分辨率相对比较低,垂直分辨率基本上没有。导致它看不远也看不清。那么在今年发现了很多的自动驾驶的事故中,传感器的能力不足是一个关键的因素之一。比如说看不清道内的静止车辆或者事故车辆,比如说看不清到内的这种隔离栏,这些都导致了一些严重的事故。
菏泽接近开关当被问及集中传感器放在外部舱内的重要性时,Boulay提到了Magneti Marelli的智能角落,它可以容纳传感器,如激光雷达、雷达、相机和超声波,以及基于led的照明功能,如自适应光束和数字光处理。“对于oem厂商来说,在制造过程中整合这些前排乘客乘坐侦测系统可能更容易,但如果发生事故,为保险或消费者更换的成本将非常高。”“所以必须在整合、可修复性和成本之间找到平衡。”
资料接近开关新能源车售后咋样?车主:软件能力要强,服务也需跟上对于车主王蒙反映的“没有主动联系事故车辆”一事,特斯拉400官方客服只是重复地表示:“每辆车都装置了传感器,遇到‘特殊情况’会自动向特斯拉官方报警,在收到报警信号后,‘必要情况’下会致电消费者并提供指导。”对于什么是“特殊或必要情况”,客服并未给出明确答复,仅表示“我们会根据事故的严重程度来判断”。
2.1动力电池系统 电动汽车中高压系统的功能是确保整车系统动力电能的传输,并随时检测整个高压系统的绝缘故障、断路故障、接地故障和高压故障等,是确保整车设备和人员安全的首要任务,也是电动汽车产业化的关键技术之一。 电动汽车的主要部件----动力电池系统属于高压部件,其设计的好坏直接影响着整车安全性及可靠性。在动力电池系统中,从故障发生的部位看,分为传感器故障、执行器故障(接触器故障)和部件故障(电芯故障)等,动力电池系统故障诊断及处理十分必要。 动力电池系统故障按照故障发生的部位可以分为三类,即单体电池故障、电池管理系统故障、线路或连接件故障。 (1)单体电池故障单体电池的故障包括三种。 ①第一种故障电池性能正常,无需更换,对应故障有单体电池soc偏低和单体电池soc偏高。如果单体电池SOC偏低,则该电池在汽车行驶过程中,电压最先达到放电截止电压,使得电池组实际容量降低,应对该单体电池进行补充充电。如果单体电池soc偏高,则该电池在充电末期最先达到充电截止电压,影响充电容量,需对该单体电池进行单独补充放电。 ②第二种故障电池性能衰退严重,应立即更换,对应故障有单体电池容量不足和单体电池内阻偏大。在电池组中,最小的单体电池容量也限制了整个电池组的容量,因此发生单体电池容量不足故障会影响车辆续驶里程。锂离子电池内阻如果过大,会严重影响电池的电化学性能,如充放电过程中的极化严重、活性物质利用率低、循环性能差等。 ③第三种故障电池影响行车安全,对应故障包括单体电池内部短路;单体电池外部短路;单体电池极性装反,在强振动下锂离子电池的极耳、极片上的活性物质、接线柱、外部连线和焊点可能会折断或脱落,造成单体电池内部短路或者外部短路故障。 通常情况下,造成单体电池前两种故障的原因可能包括两个:一是动力电池成组时单体电池一致性问题,单体电池的soc、容量、内阻木身就存在差异;二是单体电池在成组应用过程中因为应用环境差异(如温度、充放电电流)造成的一致性差异增加,加剧单体电池的不一致性。 (2)电池管理系统故障电池管理系统对于保障电池组的安全及使用寿命,最大限度发挥电池系统效能具有重要作用。电池管理系统通常对单体电压、总电压、总电流和温度等进行实时监控采样,并将实时参数反馈给整车控制器。电池管理系统除了对电池性能参数进行监控、实施电性能管理以外,还具有热管理为主的应用环境管理,实施对电池的加热和冷却,确保电池的良好应用环境温度以及温度场的一致性。若电池管理系统发生故障,就失去了对电池的监控,不能估计电池的soc,容易造成电池的过充、过放、过载、过热以及不一致性问题的增加,影响电池的性能、使用寿命和行车安全。 电池管理系统故障包括CAN通信故障、总电压测量故障、单体电压测量故障、温度测量故障、电流测量故障、继电器故障、加热器故障和冷却系统故障等。 (3)线路或连接件故障线路或连接件故障的诊断对于确保行车安全和整车的可靠性同样重要。例如,因为车辆的振动,电池间的连接螺栓可能会出现松动,电池间接触电阻增大,发生电池间虚接故障,以致电池组内部能量损耗增加,造成车辆动力不足和续驶里程短,在极端情况下还能引起高温,产生电弧,熔化电池电极和连接片,甚至造成电池着火等极端电池安全事故。 在电动汽车运行过程中,单体电池之间可能发生相对跳动,造成两电池间的连接片折断。电池箱和电动汽车的电气连接也是故障的高发点,电插接器在经历长时间振动后容易产生虚接,出现易烧蚀、接触不良等故障。
从爆炸源头来说,污水处理厂产生的有机气体必须要有监测,需要定期巡检、提前发现或预测到这类事故。污水处理厂应当安装气体传感器,如果气体泄漏或达到一定浓度,就会报警。工人进入密闭空间时,要先拿气体检测仪器测试一下,是不是浓度很高。如果浓度不高,也要敞开一定的时间,工人才能进去进行作业。
就像发动机的“舱室”,成本大约是发动机成本的25%。飞机在飞行之际需要确保发动机不会受到干扰,在地面需要维修发动机,避免出现严重的交通事故。作为工业机器人的重要组成部分,业界对于触觉传感器的要求十分严苛,这在一定程度上阻碍了工业机器人企业研发触觉传感器的脚步。
特斯拉撞车事故表明摄像头+毫米波雷达系统缺乏冗余度,容错性差,难以完成自动驾驶使命。近期的一场特斯拉撞车事故中,特斯拉Model S在开启了自动驾驶模式(Autopilot)的情况下,撞上了一辆正在横穿马路的白色重型卡车。事故发生的主要原因有:1)毫米波雷达测距可能误判。毫米波雷达测到前方有巨大障碍物,但可能因为卡车反射面积过大和车身过高,毫米波雷达将拖挂车误判为悬挂在道路上方的交通指示牌;2)Model S的前置摄像头EyeQ3可能误判。事故拖挂车是横置的,全身白色,没有色彩警告,在阳光强烈的环境下,图像识别系统容易将拖挂车误判为白云。在极端情况下,特斯拉的毫米波雷达和前置摄像头均发生了误判。可见摄像头+毫米波雷达方案缺乏冗余度,容错性差,难以完成自动驾驶的使命,需要多个传感器信息融合综合判断。