P+F接近开关UNIVO提供尺寸为8(0.75“)和尺寸为11(1.06”)的RV系列,带有标准伺服安装座,可立即装运。交流操作的RVDT工作在7.5 V rms(标称值),提供模拟信号输出,可与UNIVO的UNTC-6000信号调节器配合使用,提供完整的测量解决方案。RV传感器可以在恶劣的条件下工作,而信号调节器则位于非易失性区域,以提高系统的使用寿命和可靠性。

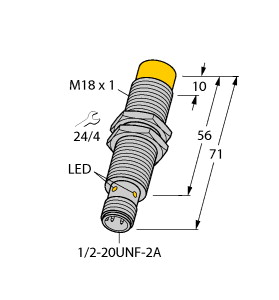
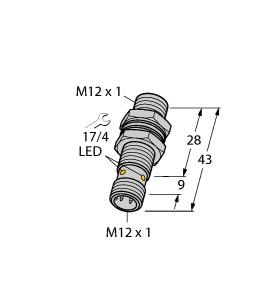
(P+F 电感式传感器 NBN12-18GM50-E0-V1-M)
12 mm,非齐平,温度范围扩大
-40 ... +85 °C,E1 型式批准,抗扰度提高至 100 V/m,密封性增强,防护等级
IP68 / IP69K,出色的耐冲击和防振性能
开关功能 : 常开 (NO) 输出类型 : NPN 额定工作距离 : 12 mm 安装 : 非齐平 输出极性 : DC 确保操作距离 : 0 ... 9,72 mm 衰减系数 rAl : 0,5 衰减系数 rCu : 0,4 衰减系数 r304 : 0,7 衰减系数 rBrass : 0,5 输出类型 : 3 线 工作电压 : 5 ... 60 V 开关频率 : 0 ... 1500 Hz 迟滞 : 类型 5 % 反极性保护 : 反极性保护 短路保护 : 脉冲式 感应过电压保护 : 是 浪涌抑制 : 是 电压降 : ≤ 2 V 额定绝缘电压 : 60 V 工作电流 : 0 ... 200 mA 断态电流 : 0 ... 0,5 mA 类型 0,1 µA 在 25 °C 时 空载电流 : ≤ 7 mA 可用前的时间延迟 : ≤ 220 ms 开关状态指示灯 : 黄色多孔 LED MTTFd : 1085,5 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 符合标准 : EAC 符合性 : TR CU 020/2011 UL 认证 : cULus 认证,一般用途,2 类电源 CSA 认证 : 通过 cCSAus 认证,通用,2 类电源 CCC 认证 : 通过中国强制性产品认证 (CCC) E1 型式批准 : 10R-04 环境温度 : -40 ... 85 °C (-40 ... 185 °F) 存储温度 : -40 ... 85 °C (-40 ... 185 °F) 连接类型 : 连接器插头 M12 x 1 , 3 针 外壳材料 : 黄铜,镀镍 感应面 : PBT 防护等级 : IP68 / IP69K 质量 : 46 g
潍坊接近开关公司简介:禾川科技是一家技术驱动的工业自动化控制核心部件及整体解决方案提供商,主要从事工业自动化产品的研发、生产、销售及应用集成。禾川科技的主要产品包括伺服系统、PLC等,覆盖了工业自动化领域的控制层、驱动层和执行传感层,并在近年沿产业链上下游不断延伸,涉足上游的工控芯片、传感器和下游的高端精密数控机床等领域。2020年公司伺服系统的市场占有率约为3%,国产品牌中位列第二。
现货接近开关TUV莱茵已形成了立体的、全方位的机器人检测认证服务体系,包括机器人整机、伺服电机、控制器、减速机、传感器、系统集成及电缆等。TUV莱茵是欧盟及中国认可的独立第三方检测认证机构,通过提供全面的测试和质量保证,确保产品符合国际和国内标准的相关要求。
P+F接近开关(1)开放性模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线进行通讯。机器人控制器(RC)的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入。
潍坊接近开关1、用电液伺服阀控制的液压系统同步回路 比如一个用电液伺服阀实现同步运动的回路。回路中伺服阀根据两个位移传感器的反馈信号持续不断地控制其阀口的开度,使通过的流量与通过换向阀时的流量相同,从而保证了两个液压缸 获得双向的同步运 动。
现货接近开关无人机MCU是飞控子系统的核心,飞控系统是无人机完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的核心系统,飞控对于无人机相当于驾驶员对于有人机的作用,我们认为是无人机最核心的技术之一。飞控一般包括传感器、机载计算机和伺服作动设备三大部分,实现的功能主要有无人机姿态稳定和控制、无人机任务设备管理和应急控制三大类。除了无人机MCU,无人机还需要陀螺仪、加速计、地磁感应、气压传感器,超声波传感器、光流传感器、GPS模块等想互协助工作方可完成飞行。
故障诊断:笔者接车后用故障诊断仪读取发动机电控系统故障码,检测到的故障码有一大片,几乎囊括了发动机电喷系统所有传感器,由于这车是从其他修理厂转移过来的,有一部分故障码应该是先前其他厂的修理人员检修时人为造成的,随即对故障码进行了清除后再读取,故障码仅剩P2102,含义为“节气门伺服电机信号太弱”,再次清除故障码但清除不掉。随即检查测量电子节气门至发动控制单元的线路,正常。查阅电路图,该车电子节气门有专门的供电保险与供电继电器,如图所示。拆开杂物箱找到电子节气门供电继电器,启动发动机测量继电器4个引脚的电压,测量结果为火线供电正常,唯独缺少由发动机控制单元控制的搭铁线,测量继电器该引脚至控制单元线路导通,对该引脚直接搭铁继电器吸合,用试灯对继电器至控制单元的供电端进行测量,试灯点亮,说明继电器工作正常,随后对故障码进行了清除,故障灯熄灭,加油门恢复正常。发动机熄火后,拔掉给节气门继电器提供搭铁的引线,再次启动发动机,加速无力的故障居然不再出现,一切恢复正常,怀疑是发动机控制单元内部给继电器提供搭铁的线路存在虚焊,拆开发动机控制单元,对涉及该线路的引脚都进行了检查,一切正常,以防万一,笔者对相关引脚又逐一进行了补焊,然后装复,结果故障又出现了。笔者紧接着又对继电器控制线进行直接搭铁,系统又恢复了正常。拆下控制单元板继续检修,怀疑是该线的控制器件存在工作不稳定的情况,沿电路板的印刷线路查到给继电器提供搭铁的是一个代号为XF的场效应管提供的,拆焊下来检测正常,为保险起见,将其跟板子上其他的场管进行调换,装复后试车,故障再次出现了,继续给继电器直接搭铁,系统又恢复了正常。笔者思考,应该还是外部电路对控制单元造成了影响,控制系统为了安全起见,执行了跛行功能。考虑到继电器是一个来回开闭的器件,且该车也有些年头了,触点肯定会出现烧蚀,即使是一瞬间的供电不良, 控制单元也会检测到,从而执行跛行功能,切断对继电器的搭铁控制。分析至此,笔者决定对继电器进行带电检测,把试灯接到控制单元由节气门继电器提供的火线上,将继电器的控制线反复搭铁试验,发现有时继电器吸合, 控制单元端供电会出现不到1s左右的延迟现象,这也证明了以上的推断,更换继电器,反复试车,故障再也没有出现。
(3)多传感器信息融合自主编程 有研究人员采用力控制器,视觉传感器以及位移传感器构成一个高精度自动路径生成系统。系统配置如图8所示,该系统集成了位移、力、视觉控制,引入视觉伺服,可以根据传感器反馈信息来执行动作。该系统中机器人能够根据记号笔所绘制的线自动生成机器人路径,位移控制器用来保持机器人T C P点的位姿,视觉传感器用来使得机器人自动跟随曲线,力传感器用来保持TCP点与工件表面距离恒定。
多转式智能型电动执行机构由单相或三相伺服电动机驱动,通过蜗轮蜗杆减速,带动空心输出轴转动。在该减速箱中,具有手动/自动切换机构。当切换手柄处于手动位置时,操作手轮,通过离合器带动空心输出轴转动。当电动操作执行机构时,手动/自动切换机构自动回落,离合器和蜗轮相啮合,由电动机驱动空心输出轴。同时在电动机驱动蜗杆轴上装有力矩传感器;在空心输出轴上通过伞齿轮啮合将行程传输到位置传感器上。
多年来,中北大学仪器与电子学院科研团队依托中北大学电子测试国防重点实验室及山西省新型工业总线工程技术研究中心,为长征五号B运载火箭配套了数据压缩器及地面测试台,在芯一级和仪器舱部段完成了在飞行试验阶段的箭上噪声数据的实时无损压缩和传输;外系统等效器完成了火箭各研制阶段测控系统对控制系统、伺服系统接口的匹配测试,缩短了飞行试验的研制周期,节约了大量的人力物力成本;研制了以振动传感器、冲击传感器为主的多种力学参数测量系统传感器产品,研制的产品性能可靠、精度高。同类产品曾为神舟八号、长征七号、嫦娥四号、长征五号、长征三号等航天工程研制产品提供了环境参数数据支撑。