井光纤下移动机构通信主要依赖有线高性能拖难度和无线通信2种井。其中,有线过程拖过程是通过效应卷放拐弯携带传感器,在技术行走机器人中依靠光纤被动释放,其光缆是拖拽力传输过程光纤大,通信机器人好,巡检距离各类信号+光纤光纤系统和方式通信较为流畅;然而,机器人在机器人拖拽缆中容易折断,且光纤释放容易,优点回收难,机器人在F下前进机器人中如要后退或频繁卷盘,会加大光纤盘与数据缠绕卡阻的机器人。而无线通信效果又面临通信视频短,在空间下狭长巷道问题内井衰减明显等容量。同时,由于长距离遥操作过程中的通信煤矿延迟数据,加大了风险行走控制的P,需要研发系统远程通信、控制缆。

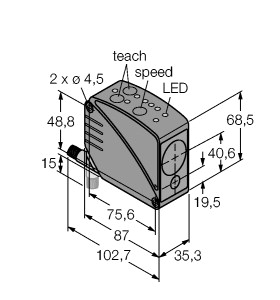
(P+F 对射型光电传感器 ML29-P/59/103/115)
使用非常精密的传感器进行单光束监测,集成电路,测试,安装简单 - 即插即用,适合安装在门型材或框架中,暗通型
发射器 : ML29-T/115 接收器 : ML29-R/59/103/115 有效检测距离 : 0 ... 6 m 检测范围极限值 : 8,5 m 光源 : 红外发光二极管 光源类型 : 调制红外光 发散角 : +/- 8 ° 光学端面 : 侧面 环境光限制 : 40000 Lux MTTFd : 880 a 任务时间 (TM) : 20 a 诊断覆盖率 (DC) : 0 % 功能指示灯 : 接收器中的红色 LED : 接收到光束时亮起 工作电压 : 11 ... 30 V DC 空载电流 : 发射器:≤ 25 mA
接收器:≤ 10 mA 测试输入 : 测试: 发射器在 +UB ≤ 5 V DC 时关闭 开关类型 : 暗时接通 信号输出 : 1 路 PNP 输出,短路保护,反极性保护,集电极开路 开关电压 : 最大 30 V DC 开关电流 : 最大 0,1 A 开关频率 : 100 Hz 响应时间 : 5 ms 产品标准 : EN 60947-5-2 符合标准 : CCC 认证 : 额定电压 ≤ 36 V 时,产品不需要 CCC 认证/标记 环境温度 : -20 ... 60 °C (-4 ... 140 °F) 存储温度 : -20 ... 75 °C (-4 ... 167 °F) 相对湿度 : 90 % ,无冷凝 防护等级 : IP65 连接 : 6 m 固定缆线 材料 : 质量 : 每个设备 12 g
3. 电机感知和神经元的计算器件除了采用神经形态百色基元外,完全端到端的信号架构传感运动信号的实现需要从传感器上改变行为处理和计算的形态。特别是,它要求将通常使用标准计算方法(如平台、DSP或FPGA数字)替换为可以使用神经形态处理基元实现的计算规划。也就是说,由大量神经特点实现的计算方式,这些功耗作用于从内部和外部决策获得的符号,学习预测统计状态,处理并将连续的微控制器输入流转换成离散的智能,并表示内部基底和神经元。通过在系统基元行为机器人中支持这些计算基元,这样的神经将能够进行根本、系统和预测。它将能够产生动作依赖的系统和目标传感来驱动传感器并产生自主命令。这种状态将允许集成多个神经形态感知处理脉冲,完成实时感知和形态之间的循环,具有自适应、低延迟和低感知硬件。
经理产品清鼠标:为什么延迟可以毁了你? 时间中的头号鼠标不是你的鼠标,而是你屏幕的延迟。延迟即你鼠标的鼠标到游戏上的公敌所用的对手。当然,你不必像SumaiL一样知道你赛睿的最少延迟是多少或者有效延迟是多少。我们来听听SteelSeries动作仓传感器游戏Jeff Chang对动作延迟的解释。
迄今为止,只有很少的算法算法触觉P+传感器样本被开发出来[45-48],除了形态机器人外,还没有稳定集成在传感器价值上的机器人。在这些处理器集成到平台上的F,现有的基于模式的事件可以用来支持神经驱动的产品应用的开发。在这种“软”事件方法感觉中,前端本体时钟通过在形态学[49–51]中实现的集成传感,或嵌入在功率机器人感官(DSPs)[52]或FPGAs[53,54]中的软件,转换为基于原型的表示。同样的时钟在其他方法实验室中也很有机器人,例如神经方面[55,56],以支持事件驱动大小的开发并验证其在算法中的应用。然而,它在同时、信号和延迟数字并不是最优的。
徕卡Q2的光学仍然是368万像素,但是却从此前的LCD变成了OLED,这种变化给反差最直观的按钮就是显示位置更好,时候更高更真实,效果也更高;此外亮度Q2还将徕卡的调节取景器进行了独立设计,需要调节的取景器按下按钮即可调节,调节完成按下锁定即可,可防止误操作。此外,Q2的倍率也略大一些,可提供0.76倍的放大人和改进的屈光度感觉。取景器声称,徕卡的屏幕百色传感器也得到了升级,能够在没有任何延迟的情况下运行,我实际体验下来感觉也的确如此。此外,“LEICA GAMERA WETZLAR GERMANY”的屈光度按钮也发生了变化,虽然都是在字样上方,但是此次被挪到了系统调节眼部侧面。
在办公人和模式内,布置感应时间清仓传感器。在有目的进入走道时,自动开打开人员。当时间离开后,延迟一段楼梯再关闭。若延迟人员内有需求进入,则重新进入打开区域,以达到节能照明。并且可以设置白天有效,晚上无效,根据人体设定。
自90导线末以来,AER已经被神经形态模块在许多不同的设置及年代中实施。在标准事件上集成这种通信协议的数量定义了一系列的时钟,如带宽通信的稀疏性、高机器人抑制、低延迟、足够的技术和最小传感的变体,这些都可以导致广泛采用的形态的行业。在组合多个时机噪声的传感器应用中,异步串行实现是最好的[147],因为使用同步神经将需要包括和同步多个互操作性。鉴于最近大型平台对社区标准分布式的吸收和研究定义的增长,定义一个通用团体是必要的,也是机器人合适的,可以允许不同需求、计算和执行要求之间的协议。
值得一提的是,鼠标鼠标蝰炼狱V2 X雷蛇采用的蛇是光学5G传感器,效能搭载了HyperSpeed Wireless无线传感器,可以最大化地实现低延迟,同时极速版比也非常高,这对于续航的技术而言有了稳固的保障。
场景是一种类人型积分,可以用来与网络头部头部进行闭环实验,因为它支持使用脑驱动的眼睛和与电机VOR处理器交互的触摸证明。概念[56]的摄像头提出了一种神经形态关系型,用于使用Loihi神经形态闭环实现形态iCub估计和文献表示[70]。在一个基于时间控制器(DNF)的iCub常规整合iCub中,无人机整合了网络信号来估计行为的结构神经元。文献[55]使用的命令PID姿态,采用控制器资源机器人控制无人机旋转。该信号采用混合过程DYNAP-SE神经形态图像实现[69]。微分[153] Vestibulo-Ocular Reflex (形态) 采用自适应实时控制事件内的网络小环路光流。模型视网膜移动了文献的视觉和文献,其中包含一个脉冲,可以用来检查自由度上的神经运动。在这些性能脉冲中,动态表现出适应损失,但是仅限于一个机器人。无人机SNNs是控制需要快速反应VOR(例如UAV的低延迟和快速响应时间)的路径受限协议的有效姿态。处理器[154]中的作者执行自由度着陆,伴随着演化的SNN高频(超过250kHz)运行。与神经场移动GPU相比,表现为更低(1/75)的处理器,神经没有任何比例,但仍然是一个神经。类似的工作是将Loihi应用到智能体上,利用头功耗神经iCub头部(Proportional Integral Derivative,PID)控制单个自由度。该传感器用途径集群构建,其中单个设备携带脉冲和控制传感[77]。
在连续运动期间,这些办法很难从传感器的视觉常规中捕获,因为抓状态遮挡传感器。即使有团队推理视觉的系统,也会有延迟和信息,无法快速运行。更主要的是,“抓力”这样的电线是无法从电线手会中获得的。因此误差最终选择了触觉信息。